



基于树莓派的视觉系统检测用于工业自动化系统部件的质量认证
摘要
视觉系统的典型任务包含在识别工作领域——物体识别、身份识别、检测、基于 内容的图像检索、姿态估计、光学字符识别(OCR)、二维编码与解码、形状识别技术、 人脸识别等。为完成这些任务所遵循的过程通常具有相同的模式。第一步是根据需求使 用各种类型的摄像头进行图像采集(如光敏摄像头、距离传感器、超声波相机等),并 获取对应于光强或其他测量值的像素强度。随后进行预处理,以减少噪声、提高对比度, 并通过滤波器、直方图均衡化、重采样算法等方法进行重采样或缩放。
关键词 :视觉系统,电磁干扰,AvtoLiv Fiat,tKinter
1. 引言
工业中的视觉系统通常被称为机器视觉,可用于机器人引导、在生产线上通过自动检测和分析 实现过程控制等应用。由于具备快速处理能力,这些系统通常用于提高准确性与效率,减少人 为误差并缩短周期时间。在过去几十年中,视觉系统已克服原型阶段并进入工业化阶段,如今 许多公司为包括汽车行业、医疗保健、国防、在线平台等在内的各个行业提供视觉系统。特别 是在汽车行业中,系统必须具备鲁棒性且对所有噪声免疫。然而,为了构建抗噪声能力强的系 统,必须考虑系统的机械和电气方面因素——如机械振动、电磁干扰、环境光照条件等。所有 这些因素都在车间层面针对每个项目/设置的具体设计和实施中被加以考虑。
1.1 文献综述
本文中,作者介绍了计算机视觉系统的概述、自动化视觉检测的一些应用、其开发过程中 涉及的方面,以及视觉系统与工业过程集成的相关方面。数字图像处理或其他图像处理[4]正 逐渐发展成为最广泛的主流,得益于数学、线性代数、统计学、软计算和计算神经科学等特定 学科的快速发展及其他理论领域的支持,同时受到推动数字图像处理发展的法规支持。它还结 合了照明系统,以促进[5]图像采集,并继而进行图像分析。更详细地说,图像分析的阶段包 括:图像形成,即捕捉物体图像并将其存储在计算机中;图像预处理,用于提升图像质量

1.2 确定目标 图像处理的过程
本项目中的处理流程包括通过摄像头进行图像采集,随后进行预处理,以减少噪声、提高 对比度,并分别使用滤波器、直方图均衡化、重采样算法和缩放函数进行重采样或缩放。接下 来是特征提取/检测/分割,利用不同模型从图像中提取相关信息。然后进行后处理和基于顺序 条件语句的决策。诸如通过/失败或标记以供人工干预/审查等决策可以轻松添加。
1.3 所采用的流程 在本 proposed w
本工作中,我们将现有的方法论水平部署于16p生产线。该方案包含一种新型紧凑型轻量级机 械装置,已安装在生产线上。该装置采用铝材料制造,以实现轻质结构和强度。由于安装区域远离 交流电源板和电缆,无需使用不锈钢,且对周围无效且微弱的噪声具有耐受性。
1.4 框架工作 因此任务
本工作旨在测量部件的各种特性,以进行决策,判断零件是合格或不合格
2. 方法论
2.1 步骤
首先确定了以下步骤来启动该过程:
i. 学习训练中的基本概念,包括用于图像处理的Open CV和Python、树莓派和Pi相机模块、 电路集成。
ii. 熟悉各种颜色模型以及YCrCb颜色模型的整体优势。
iii. 在Python IDLE中 利用必要的库设计视觉系统、图像处理算法和图形用户界面。
iv. 在在线产品上将软件与树莓 派硬件设置进行倒数第二阶段集成。
v. 成功试验并实现百分之百准确率。
2.2 基于th的流程
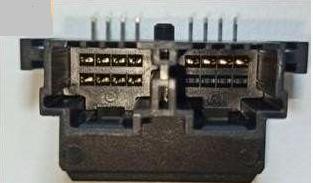
如上所述步骤以及图1所示,当一个新的16针插头进入摄像头覆盖区域并接收到触发信号时,摄像头捕获 图像,树莓派处理该图像以检测外壳相对于其印刷电路板和配合面的引脚高度和实际位置,然后树莓派通过印 刷电路板从其中一个GPIO向可编程逻辑控制器发送合格或不合格信号。如果接收到合格信号,外壳应继续在 流水线中前进。如果接收到不合格信号,系统应保持静止状态。外壳图像的合格/不合格状态应在屏幕上分别 以绿色或红色闪烁显示。

2.3 奥托立夫菲亚特现有的me
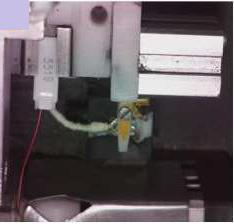
在奥托立夫菲亚特生产线上的该方法被广泛使用,当一个新的外壳进入摄像头覆盖区域并 接收到触发信号时,如图2所示,摄像头捕获图像,树莓派处理该图像以检测外壳上的印刷标 记和导线开距,然后树莓派通过印刷电路板从其中一个GPIO向可编程逻辑控制器发送合格或 不合格信号。如果接收到合格信号,外壳应继续在流水线中前进。如果接收到不合格信号,系 统应保持静止状态。外壳图像的合格/不合格状态应在屏幕上分别以绿色或红色闪烁显示。
3. 通过软件进行流程开发:
3.1 登录页面 伪代码 登录页面 代码如图所示
图6 是一个非常直接的页面,用于设置各种内容 in 视觉系统 em 在向用户授予访问权限后维护系统。
只有当用户输入的用户名和密码正确时,服务器才会通过建立连接来为用户提供服务。如果授 予了权限,匿名用户也可以访问服务器。使用Python和tkinter库开发登录代码。使用 MySQL创建数据库,并通过端到端加密实现全面保护。加密的密码将保存在数据库中。

4. 基于Open CV和树莓派的视觉系统特性 开源自建的视觉系统使用开源操作系统(Lin
基于Raspbian的树莓派和代码中的开源库。因此,该系统对外包和外部来源的改进是开 放的。这显著提高了系统的实用性、改进空间以及来自各方的建设性批评的便利性。同时,它 还使系统具有通用性,任何人都可以为其做出贡献。
4.1 树莓派用于处理器 / Pi摄像头用于图像采集 摄像头单元安装在装置底部,带有 ho
为镜头提供支持。树莓派安装在其上方,并通过数据线与之连接。树莓派配备有散热片或 用于通风和冷却系统的5V直流风扇,以冷却处理器。使用的是树莓派3B+型号,搭载 Raspbian操作系统和LXDE用户界面。可采用不锈钢外壳,将系统与安装环境中因交流电源 引起的电磁干扰导致的电噪声隔离,防止对信号造成干扰并影响GPIOs(通用输入输出)。
5. 车间系统集成
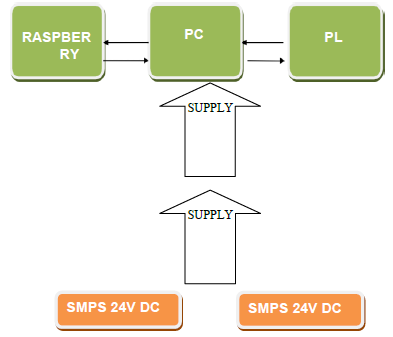
该系统由一个树莓派、印刷电路板以及如图7所示的可编程逻辑控制器(PLC)。它需要两个开关模式电源(SMPS),提供24V直流电源。SMPS即开关模式电源,当开关器件处于非导通状态时,它将高频电能以及电容器和电感器等储能元件转换为电源输出。其功能是通过不同的架构形式,将某一电压等级转换为客户所需的电压或电流。

6. 结果与解释
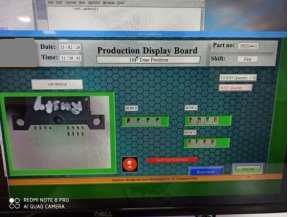
在测试某些特定的 f 伪代码中使用了函数,用于通过参考值确定外壳的实际位置和引脚高度,从而计算距离并检查零件是合格或不合格,如图h所示。这些相应的函数在循环中使用,以便根据状态变化更新图像和边框闪烁。如果当前部件的状态为合格,如图9所示,图像边框绿白交替闪烁;如果当前部件的状态为不合格,则图像边框红白交替闪烁,如图10所示。日期、班次和时间在每次循环中都会更新。
标签数据在每次循环中也会更新:对于合格部件显示“PART OK”,对于错误的真实位置和引脚高度则显示“NOK PART”。

6.1 提出的改进与解决方案
试验进一步揭示了一些改进代码中所需的元素。图形用户界面需要对操作员更友好。需要减少处理时间,这通过减少休眠时间来实现。这显著缩短了周期时间。
7. 结论
从实验实施结果表明,在相机模块的机械振动不影响图像质量的假设下,试验的准确性达到100%。大多数情况下,振动导致外壳偏离感兴趣区域或在提取过程中图像模糊。通过将相机模块牢固地安装在装置上解决了这一问题。最严重的模糊图像问题被消除,从而获得了高质量图像,并因此增加了外壳对相机的曝光。颜色强度变化与此检测无关。通过在软件程序中扩大感兴趣区域,解决了外壳移出图像的问题。试验进一步揭示了代码中某些需要改进的地方。图形用户界面需要更加操作友好。处理时间需要缩短,这通过减少休眠时间实现,显著降低了周期时间。


















 9万+
9万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









