



基于STM32的红外测油仪设计
1. 引言
由油类物质引起的水污染是主要的污染来源之一。矿物油燃料的消耗、工业废水和污水排放导致水体中的油污染,已成为全球关注的问题[1]。油类主要分为两类:石油和动植物油。水中油类物质含量的监测是水环境监测中的重要指标。目前我国对水中油类物质的测定,主要采用国家标准《水质 石油类和动植物油类的测定 红外分光光度法》(HJ 637‐2012)。红外分光光度法具有高精度、测量结果重复性好、检测方法简单、耗时少等优点。
我们设计了一款基于STM32的红外分光光度测油仪,该仪器符合国家标准,适用于地表水、地下水、工业废水和生活污水中油类物质的测定。
2. 系统总体设计
2.1 工作原理
基于不同波长的红外光频率不同的原理,红外测油仪通过特定波数的红外光照射分子时,如果该红外光的频率与分子中某个基团化学键的振动频率相同,则此键可通过吸收该波数的红外光而增强能量;反之,若红外光穿过分子时,分子中没有相同振动频率的化学键,则红外光不会被吸收。油类物质的分子通常含有亚甲基(-CH₂-)、甲基(-CH₃)和芳香核(-CH-),这些基团对 2930cm⁻¹、2960cm⁻¹、3030cm⁻¹的红外光具有明显的吸收,而萃取剂四氯化碳(CCl₄)在相同波数下无任何吸收[2]。
在物理学中,吸光度A用于衡量光吸收的程度。A值越大,光的吸收越强。朗伯‐比尔定律:
当一束平行单色光垂直通过均匀非散射的吸光材料时,吸光度A与吸收物质的浓度c及吸收层厚度b成正比。数学公式如下:
$$
A = \lg\left(\frac{I_0}{I}\right) = kcd
$$
在公式中:A 是待测物质的吸收程度;$I_0$是入射光强度;I是透射光强度;T是透光率,$T = \frac{I}{I_0} \times 100\%$;k 是吸收系数;d 是吸收层厚度;c 是样品浓度。
测量样品中油浓度的方法如下。由于四氯化碳(CCl₄)不吸收任何红外光,因此可将四氯化碳(CCl₄)作为参比溶液,用于萃取样品中的油并测量其在2930 cm⁻¹、2960 cm⁻¹和3030 cm⁻¹处的吸光度 $A_{2930}$、$A_{2960}$、$A_{3030}$。可配制特定浓度的标准溶液,快速校正测油仪,得到校正因子 $F$、$X$、$Y$、$Z$[3]。样品中油浓度的计算方法如下:
$$
C = \frac{F \times (A_{2930} \times X + A_{2960} \times Y + A_{3030} \times Z - A_{2930}) \times D \times V_o}{V_w}
$$
在此公式中:$A_{2930}$、$A_{2960}$、$A_{3030}$为在相应光波下测得的萃取液吸光度;$F$、$X$、$Y$、$Z$ 为校正因子;$V_o$为萃取溶剂体积,单位为ml;$V_w$为样品体积,单位为ml;D为萃取液稀释倍数。
2.2 油份测量仪器系统结构
传统红外测油仪需要计算机辅助进行数据采集、处理与显示,其智能化水平较低,测试流程复杂,不适合在各种复杂环境中进行现场检测。该测油仪结合嵌入式软硬件技术,开发了一种便携式智能化红外测油仪。它主要由三部分组成:光源系统、信号采集与处理系统和STM32配置工业串口屏(触摸屏)控制系统。系统的整体结构如图1所示。
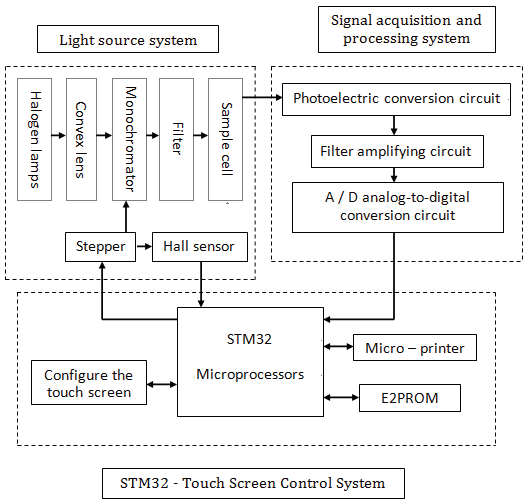
根据红外测油仪的工作原理,需要计算样品在三个光学波长下的吸光度A,以检测样品中油的存在及浓度。样品吸光度测量的原理过程如下:首先,将四氯化碳参考溶液(CCl₄)注入放置在样品池中的比色皿内。在密闭黑箱环境中,来自卤钨灯的复合光通过凸透镜聚焦后进入单色器。通过步进电机调节单色器的光栅角度,从而获得不同波长的单色光。校准步进电机的起始点,使单色器分离出红外光。红外光经过滤光片后垂直通过比色皿,照射到红外热释电探测器的光敏面上,红外热能被转换为电信号。该电信号经过滤波放大后,传输至ADVFC32电压频率转换装置,然后将频率信号输入6N137高速光耦以生成数字信号,将电信号转换为数字信号。实质上完成了A/D模数转换。转换后的数字信号需送入STM32微处理器,采集的数据将存入AT24C512可擦除可编程存储器。其次,从四氯化碳(CCl₄)中提取的样品溶液倒入比色皿并放入样品池中。不同波长的红外光进行相同的光信号处理、采集和存储。根据朗伯‐比尔定律数学公式,$\lg\left(\frac{I_0}{I}\right)$,萃取液四氯化碳(CCl₄)对红外光无任何吸收,而含有三个特定基团(2930 cm⁻¹、2960 cm⁻¹、3030 cm⁻¹)的油分子会吸收红外光。因此,入射光强度与透射光强度之比可等同于两次采集的电信号之比[4]。结合公式(1)计算三个波数$A_{2930}$、$A_{2960}$、$A_{3030}$的吸光度,并根据公式(2)计算相应的浓度。
3. 系统硬件电路设计
3.1 光源系统设计
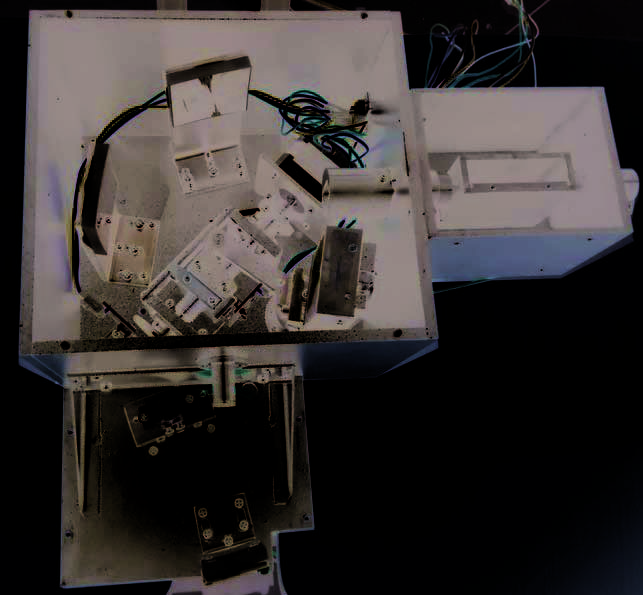
光源系统由卤素灯、凸透镜、单色器、步进电机和滤光片组成。原理图如图2所示,光源系统的实物图如图3所示。为了获得在特定三个光学波数 2930 cm⁻¹、2960 cm⁻¹和3030 cm⁻¹处红外光的吸光度A,需要依靠步进电机调节光栅角度,对红外光谱带进行扫描,扫描范围为2880 cm⁻¹ ‐3060 cm⁻¹,对应的波长范围为3472 nm ‐ 3268 nm。光源系统的主要作用是将卤钨灯光源发出的复合光通过光栅衍射,分离成各个波长的单色光[5]。灯的功率为40 W。前置截止滤光片采用红外石英材料的目的是只允许红外光透过,消除其他光谱。前端截止波长为2750 nm。单色器光学结构采用经典的切尔尼‐特纳结构,有效提高了谱线对称性和光学分辨率,并有效抑制杂散光[6]。光栅也称为衍射光栅,是一种利用多缝衍射原理使光发生色散(分解成光谱)的光学元件。通过光栅衍射,将混合在一起的不同波长的复合光相互分离。
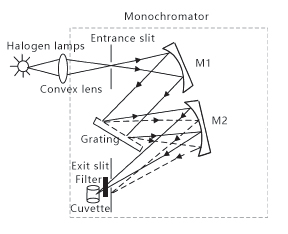
光源系统的工作流程:来自光源的复合光通过凸透镜聚焦进入入射狭缝。当光源进入单色器后,入射复合光经反射镜M1变为平行光射向光栅。反射镜M2将红外光会聚并照射到不同位置。通过步进电机旋转控制光栅角度,步进电机前后移动一步,出射狭缝的红外光增加或减少一个波长。因此,随着步进电机驱动光栅旋转,波长分离且连续的红外光依次从出射狭缝射出并照射到比色皿中。从而可自动完成2880cm⁻¹ ‐3060cm⁻¹波段的扫描范围扫描。
3.2 信号采集与处理系统
信号采集与处理系统由三部分组成:光电转换电路、滤波放大电路和A/D模数转换电路。
3.2.1 光电转换电路
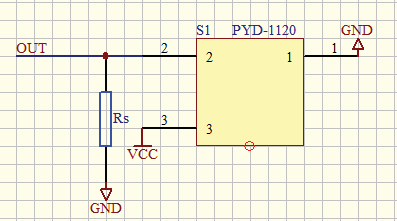
为了将红外光的强度转换为相应的电信号,采用了PYD ‐ 1120钽酸锂热释电红外探测器。钽酸锂晶体材料的居里温度高于 600 ℃,因此在较宽的室温范围内,该材料的热释电系数随温度变化很小,输出信号的温度变化率仅为1‐2%。探测器性能的温度稳定性非常好[7]。PYD ‐ 1120热释电红外探测器用于测量0.3‐4 μm范围内的光谱。根据PYD ‐ 1120的特点,调制光源频率即斩波频率为10Hz,采用正弦调制。电路图如图4所示。
3.2.2 滤波放大电路
红外热电传感器传输的电信号包含低频信号和高频信号。我们需要利用低频信号设计一个低通滤波器,以滤除高频信号中的电信号。红外热电传感器传输的电信号非常微弱,需要对电信号进行放大。我们可以使用AD620运算放大器,它是一种低成本、高精度的仪表放大器,仅需一个外部电阻即可设置增益,增益范围为1到10000[8]。电路图:图5。
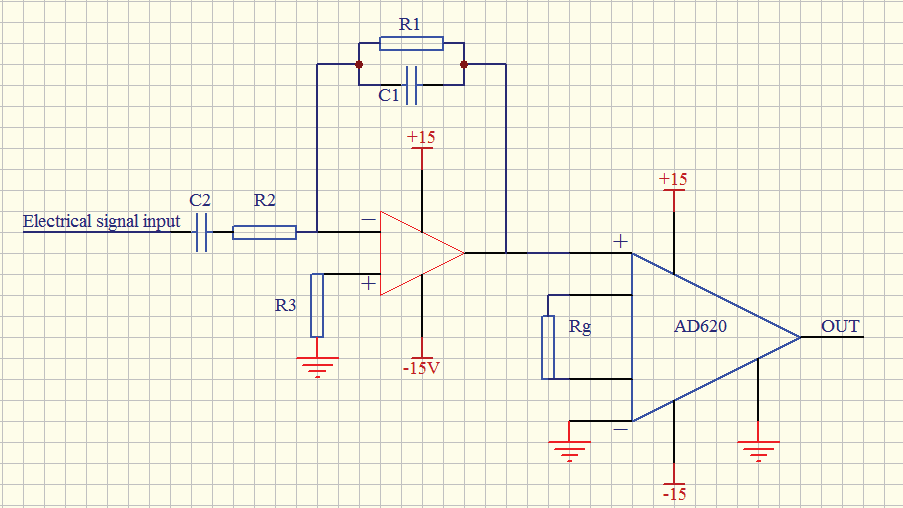
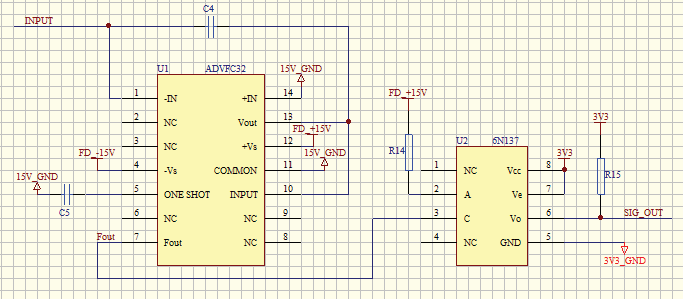
3.2.3 A/D模数转换电路
STM32处理器只能读取数字信号,而不能直接读取模拟信号,因此需要对模拟信号进行A/D模数转换。利用ADVFC32电压频率转换芯片与 6N137高速光耦芯片的组合,将模拟电信号转换为频率信号,再将频率信号转换为数字信号,从而实现A/D转换。这种转换方式比直接依赖单片机自身模数转换电路的方式更加精确。ADVFC32的特点是输出峰值为12V的尖峰波。根据输入电压与输出频率的对应公式,电压信号值决定了尖峰波的频率。6N137高速光耦通过识别尖峰波的脉冲频率输出数字信号。电路图:图6。
4. 系统软件设计
测油仪无需使用上位机,可自主完成操作系统,并独立执行多种任务,如驱动电路控制、数据采集、吸光度和浓度计算、自动绘图等。开发程序实现了STM32与配置型工业串口屏的连接,通过工业串口屏(触摸屏)实现控制界面设计。工业串口屏是集TFT显示屏驱动、图片字体存储、图形用户界面操作、实时时钟显示及多种配置控制于一体的串行显示终端[9]。用户单片机只需发送相应的串行指令,即可轻松实现文字、图片和曲线显示。
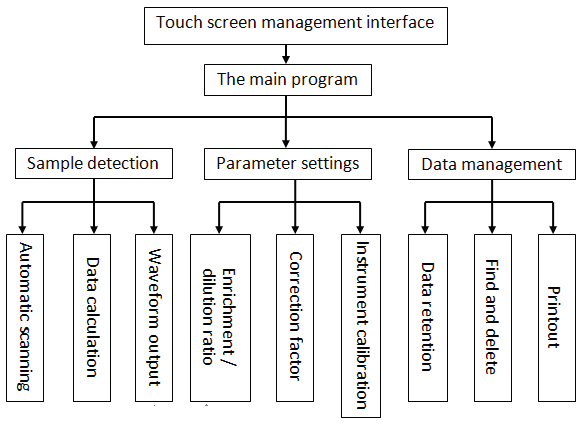
软件程序采用功能模块设计思想,根据模块化方式区分红外测油仪的功能,并编写相应的子程序。设计工业串口屏(触摸屏)功能界面;调整触摸屏与STM32串口的指令对接关系,通过点击触摸屏界面,执行主程序及内部子程序。
4.1 主程序和子程序
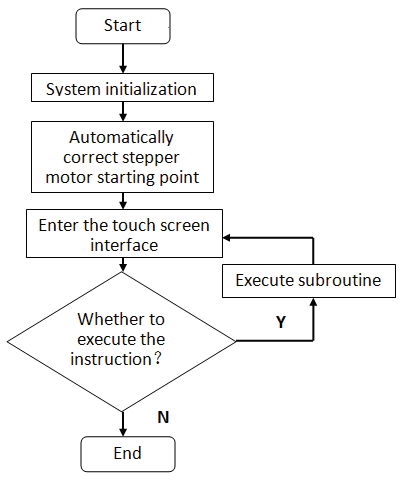
主程序用于在机器开机时完成自启动功能,步进电机配合霍尔传感器自动开始定位校正。启动成功后,仪器启动后,主程序在成功连接触摸屏后进入触摸屏界面。通过触摸屏界面点击不同的操作指令,在主程序框架内执行相应的功能模块子程序。流程图:图7、图8。
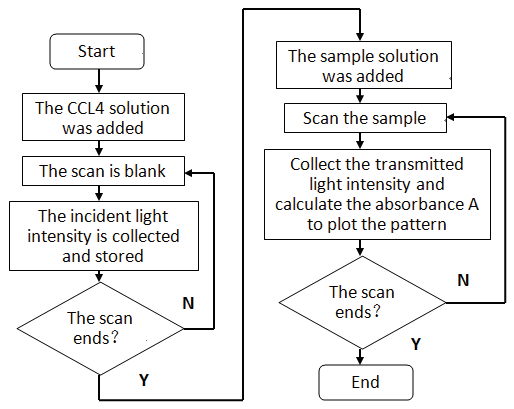
4.2 样品检测流程
机器自动启动后,即可点击进入触摸屏样品检测界面。将四氯化碳溶液倒入比色皿中,并放入样品池,点击扫描空白按钮,仪器自动执行空白扫描并保存数据。然后,将样品倒入比色皿中并放入样品池,点击扫描样品按钮,仪器自动执行样品扫描。STM32数据的计算过程是调用已保存的四氯化碳溶液的入射光强度,再与被测样品的透射光强度进行计算。得到样品在 2930 cm⁻¹、2960 cm⁻¹、3030 cm⁻¹处的吸光度。波数2930 cm⁻¹、2960 cm⁻¹、3030 cm⁻¹分别对应波长3300纳米、3378纳米、3413纳米。图9显示了样品测试流程。油类样品检测图如图10所示。
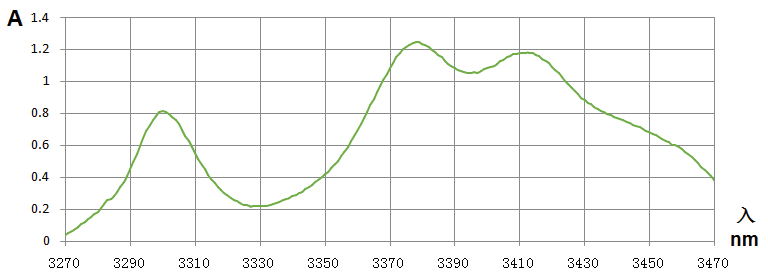
由图10可以看出,该测油仪能够准确测量污水中是否含油。并且可以测量烯烃分子中所含的三组基团:亚甲基、甲基和芳香核在3300 nm、3378 nm和3413 nm波长处的吸光度A值。
5. 结论
水污染问题日益严重,应加强对水环境中油类物质的监测,以保护人类健康和饮用水安全。基于STM32配置的工业串口屏(触摸屏)控制系统,设计了一种结构简单、高精度的智能化红外测油仪。依靠单色器将复合光变为波长连续且间隔的红外光,热释电传感器接收微弱的电信号,通过放大电路对微弱电信号进行放大,再经由ADVFC32电压频率转换芯片和6N137高速光耦实现A/D模数转换,然后将数字信号发送至STM32。通过触摸屏界面的操作,控制仪器实现各个功能模块,自动计算吸光度、浓度,并绘制标准曲线。

















 785
785

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









