 3D可视化助力产品设计协同
3D可视化助力产品设计协同




突破各类CAD格式之间的技术鸿沟,方便三维模型、工程图纸/文档协同在线浏览 ,实现设计成果智能互联、评审共享,大腾智能3D一览通为设计、工艺、生产、质量、销售、售后、采购等场景提供产品设计可视化浏览解决方案。
大腾智能3D一览通
应用场景
研发协同评审
可与PLM系统集成,便捷查看模型并实现三维模型的圈阅批注,满足产品研发过程中的协同评审应用。
设计交流共享
企业内外产品设计、制造、销售、客户、上下游合作伙伴间随时查看设计模型,交流与讨论设计更改
生产现场可视化
帮助制造业企业实现三维模型下车间的应用需求,实现车间各类工程文档的全格式浏览。

云端部署,随时查阅各类模型
通过企业云端或服务器部署,随时随地浏览三维模型及工程图
不限设备,可在个人电脑、智能手机、平板电脑 上无缝切换审阅
无需安装多套CAD软件、看图软件等,在线协同浏览与评审,节省设计软件复购成本
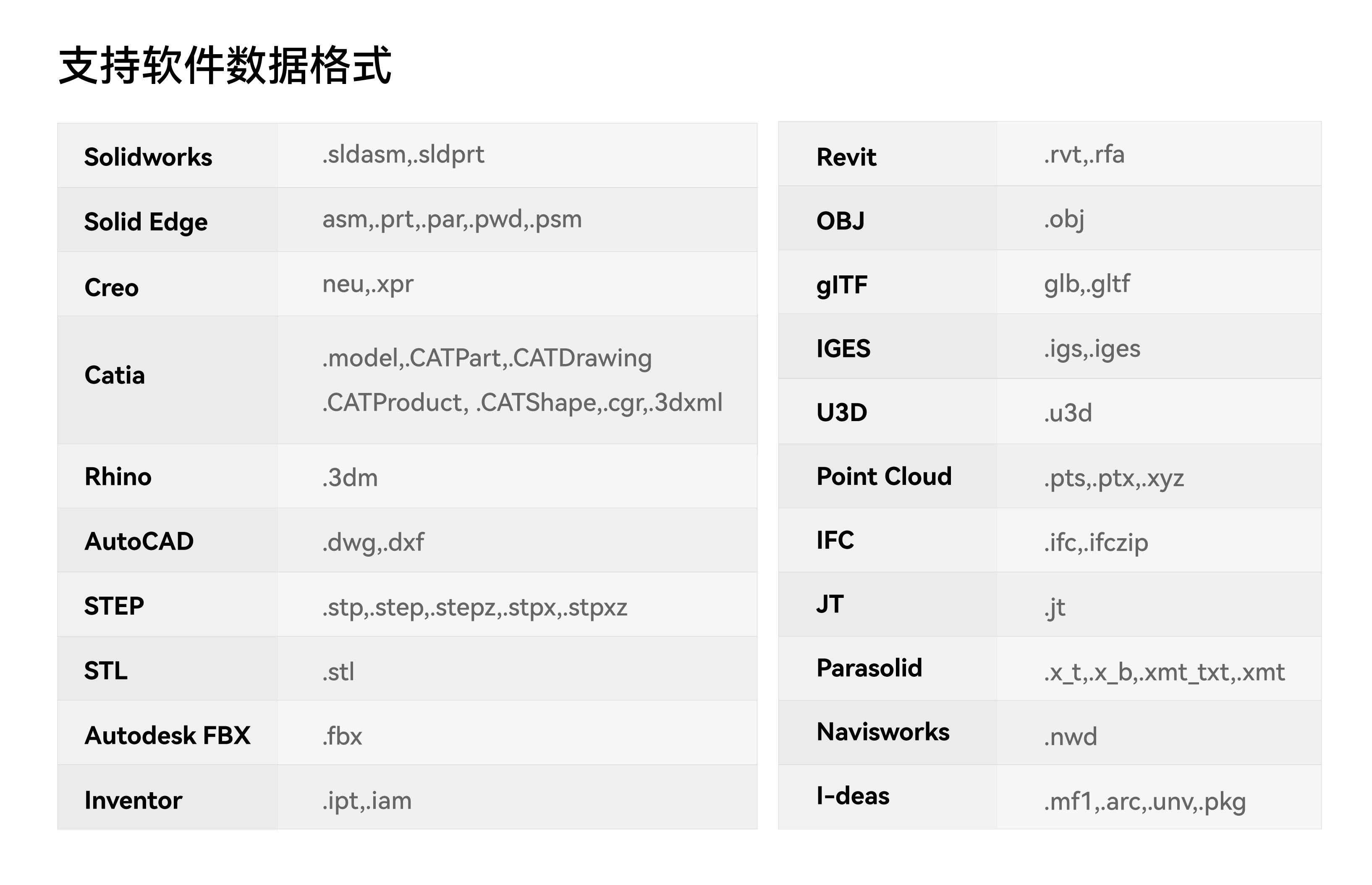
支持主流三维CAD设计原始模型和中间格式模型及二维工程图纸、PDF等文档
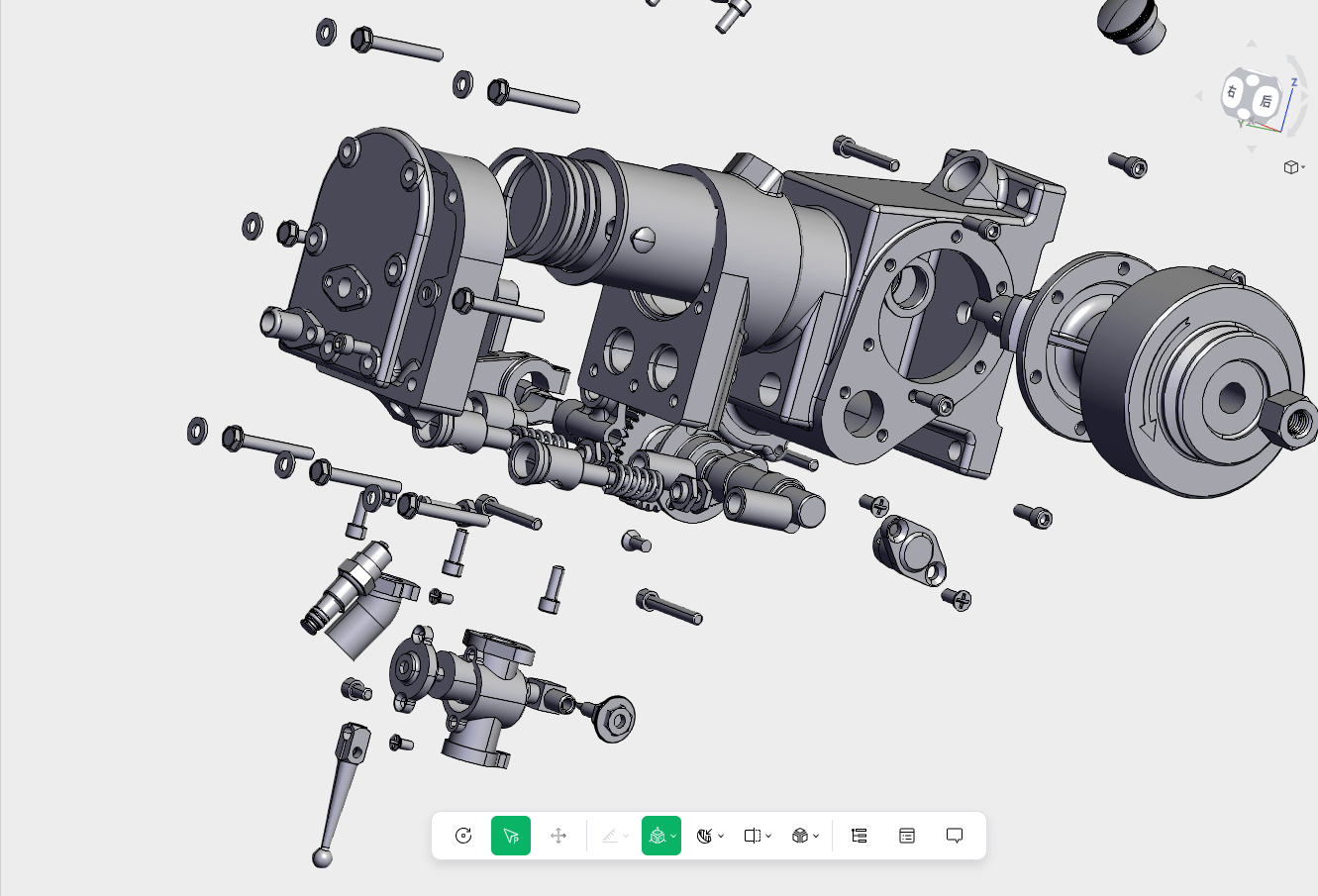
三维可视化操作功能丰富,模型爆炸
批注圈阅、尺寸测量、模型剖切、视图操作等功能,快速评审
多种模型爆炸功能,通过数字控制爆炸幅度,实现零件精细化查看
强大灵活的集成接口设计
提供API接口,供系统调用并支持嵌入第三方系统
支持与PLM、CAPP、MES等管理系统集成,实现产品生命周期的全三维协同应用
灵活在其他系统内(飞书、钉钉)完成模型浏览、PMI尺寸测量、 文件批注、模型比对等操作,实现三维数据互通。
大腾智能3D一览通
无需采购多套昂贵CAD软件
可随时、随地、不限设备
在线协同浏览、评审模型/图纸
优化跨部门、多专业并行设计流程

















 2944
2944

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









