




1、配置环境
1.1 创建实例
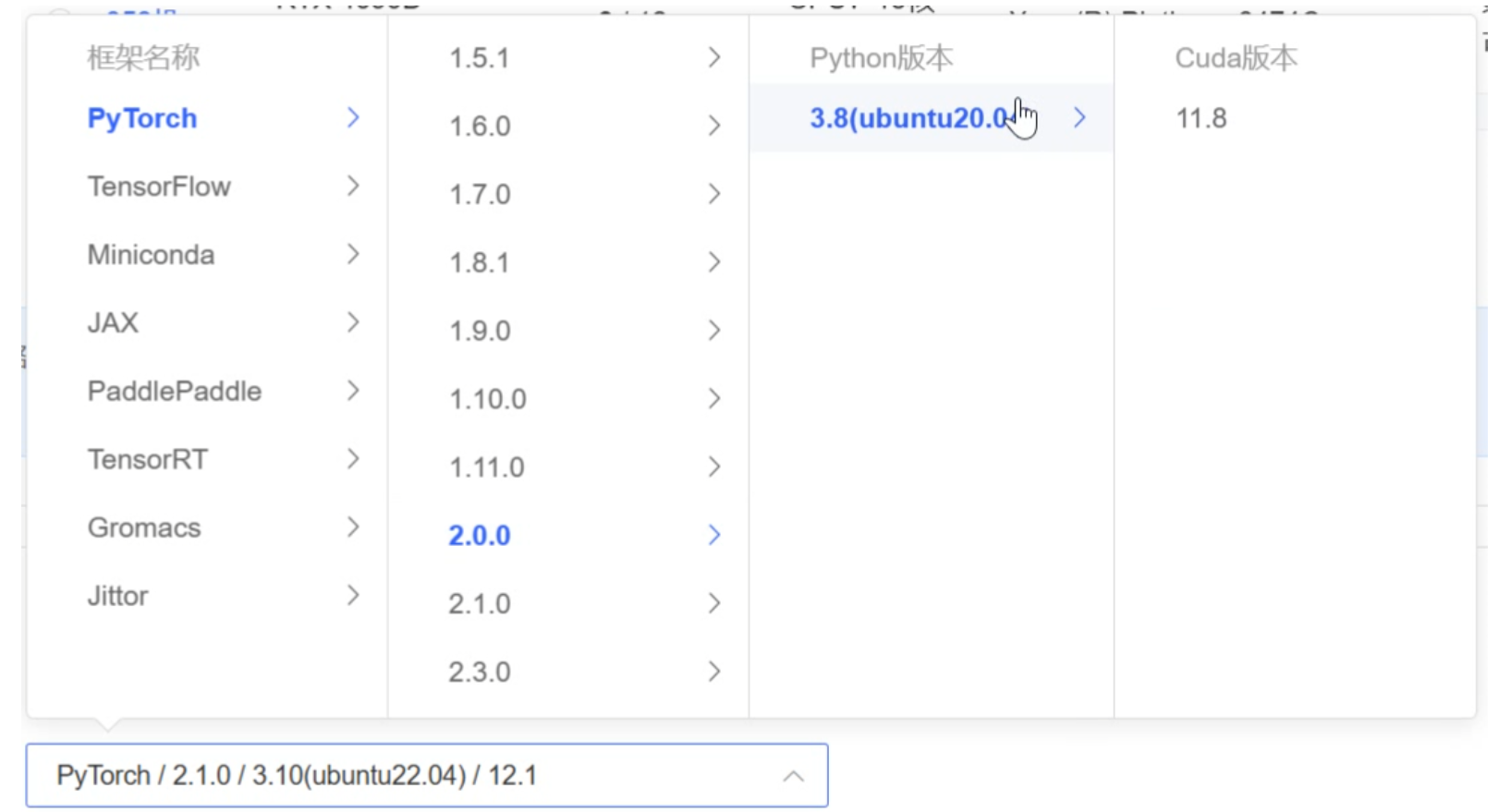
在Autodl上创建下述配置的实例(RTX3090):
创建实例后将其pip安装源换为清华源。
1.2 torch 和torchvision
运行下述命令,获取Instant-angelo的代码:
cd autodl-tmp git clone https://github.com/hugoycj/Instant-angelo.git
运行下述命令查看torch 和torchvision是否安装:
pip list
如有以下信息说明安装成功:
Package Version -------------- ------- torch 1.13.1 torchvision 0.14.1
1.3 tiny-cuda-nn
执行如下命令,下载tiny-cuda-nn项目:
cd autodl-tmp git clone https://github.com/NVlabs/tiny-cuda-nn.git
执行如下命令安装tiny-cuda-nn:
cd autodl-tmp/tiny-cuda-nn mkdir build cd build cmake ../ cmake --version cd autodl-tmp/tiny-cuda-nn/bindings/torch pip install ninja python setup.py install
上述命令运行的结果好像会报错,不过不要紧,继续执行以下命令安装tiny-cuda-nn:
pip install git+https://github.com/NVlabs/tiny-cuda-nn/#subdirectory=bindings/torch
通过运行如下命令查看tiny-cuda-nn库安装成功没有(包含tiny-cuda-nn就说明安装好了):
pip list
1.4 requirements.txt
requirements.txt内容如下:
pytorch-lightning<2
omegaconf==2.2.3
nerfacc==0.3.3
matplotlib
opencv-python
imageio
imageio-ffmpeg
scipy
CuMCubes
pyransac3d
torch_efficient_distloss
tensorboard
click
open3d
trimesh
pymcubes
plyfile运行下述命令安装requirements.txt中的依赖项:
pip install -r requirements.txt1.5 安装colmap
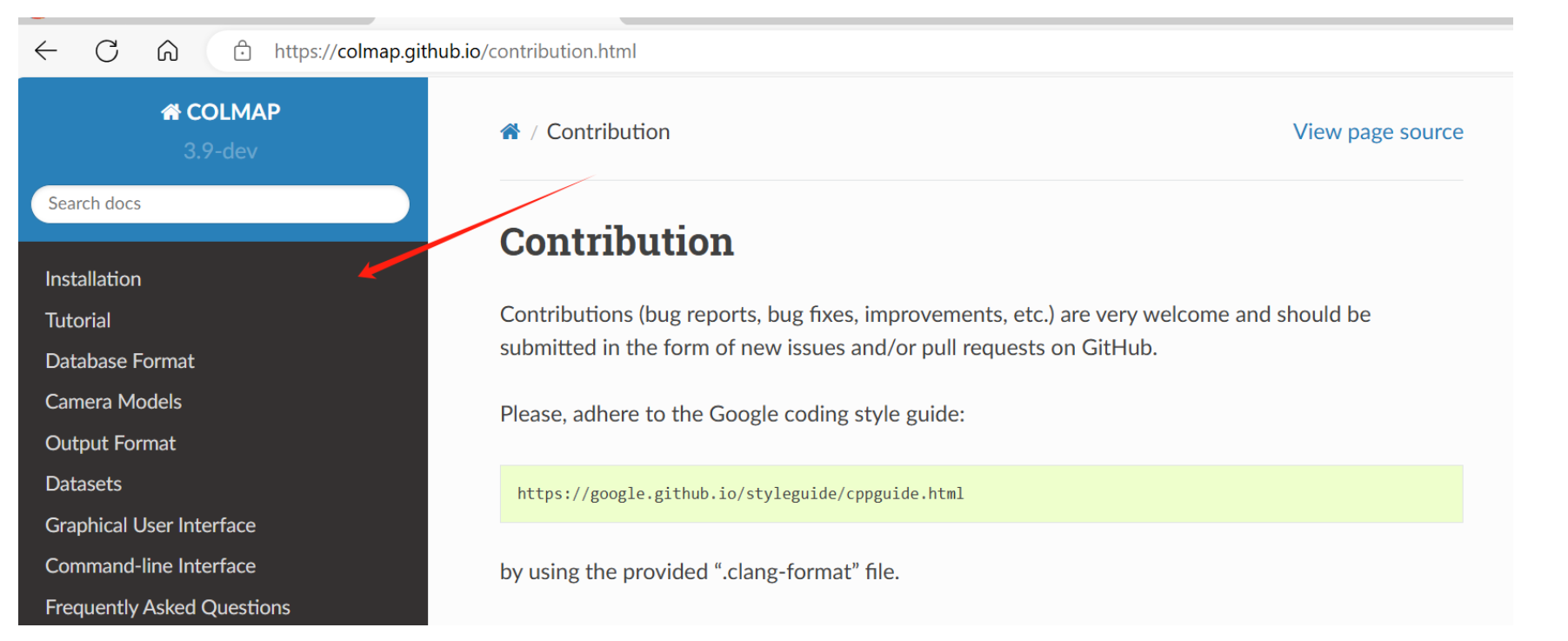
到网站COLMAP — COLMAP 3.9-dev documentation中下载colmap项目:
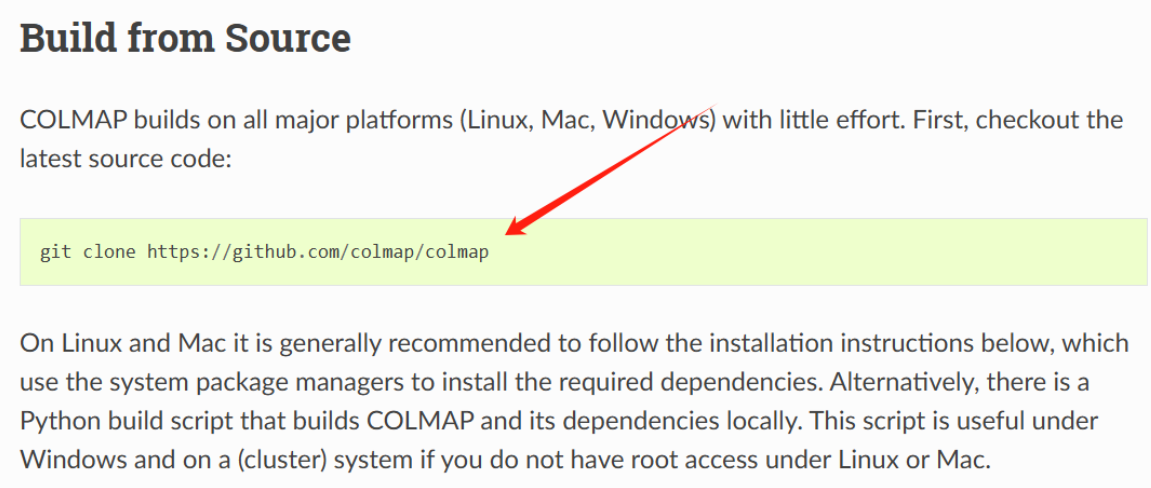
输入上述命令,下载colmap项目:
cd autodl-tmp git clone https://github.com/colmap/colmap
接下来执行以下命令利用cmake编译colmap:
cd autodl-tmp/colmap mkdir build cd build cmake ../
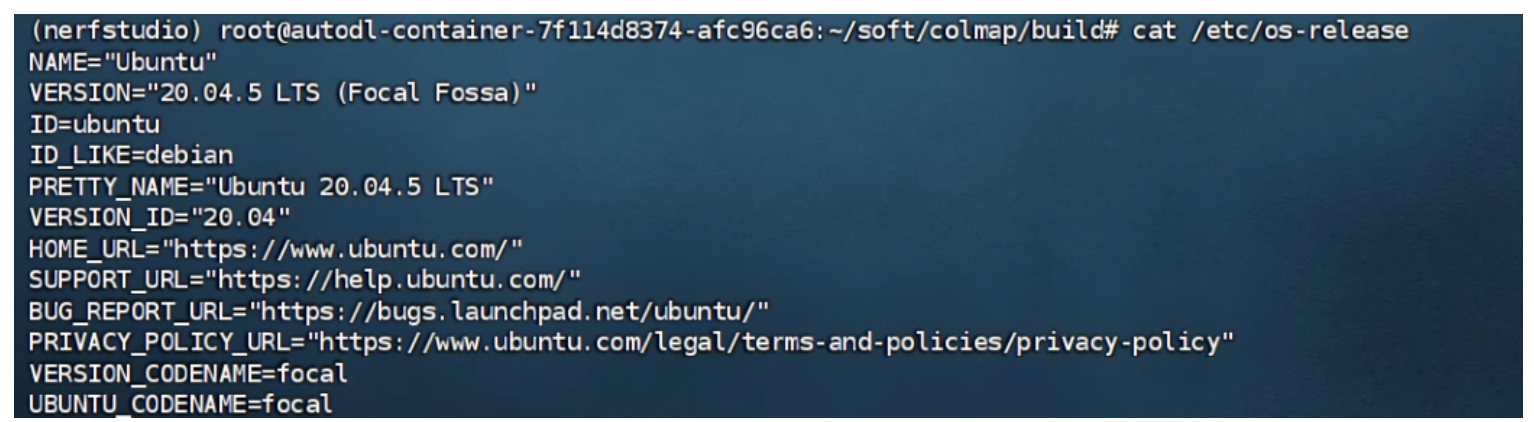
输入以下命令查看操作系统的版本信息(/etc/os-release文件就是记录的操作系统的版本信息):
cat /etc/os-release
本操作系统的版本信息如下:
执行如下命令,安装colmap在ubuntu系统中的依赖项(这些命令分开执行,因为每一条命令都可能报错):
cd autodl-tmp/colmap/build
apt update
apt upgrade -y
apt --fix-broken install
apt upgrade -y
apt-get install \
git \
cmake \
ninja-build \
build-essential \
libboost-program-options-dev \
libboost-filesystem-dev \
libboost-graph-dev \
libboost-system-dev \
libeigen3-dev \
libflann-dev \
libfreeimage-dev \
libmetis-dev \
libgoogle-glog-dev \
libgtest-dev \
libsqlite3-dev \
libglew-dev \
apt install qtbase5-dev \
libqt5opengl5-dev \
libcgal-dev \
libceres-dev重新使用cmake编译colmap:
cd autodl-tmp/colmap/build ls#查看build目录下cmake的编译文件,如下:

rm -rf ./* cmake ../ make -j 6 make install -j
运行上述命令可能报错,如果报错可能是因为没有安装Boost库,通过下述命令安装Boost库(没有报错就不管,直接运行colmap这条命令,有相对应的显示信息说明colmap就安装成功了):
sudo apt update sudo apt install libboost-all-dev
安装Boost库后运行上述的四条cmake编译命令还是可能报错,可能是因为CMake没有更新其模块路径来找到新安装的库,执行下述命令手动设置Boost的路径(前提是Boost的头文件安装在/usr/include/boost,如果不是就要修改路径):
cmake -DBoost_INCLUDE_DIR=/usr/include/boost ../
执行上述命令时会报很多错,显示很多的库没安装,依次按照错误信息进行安装:
sudo apt-get install 要安装的库的名字 rm -rf CMakeFiles CMakeCache.txt#清理 CMake 缓存 cmake -DBoost_INCLUDE_DIR=/usr/include/boost ..#清理缓存后,重新运行 CMake 配置命令
这些库都安装得差不多了之后,在执行这四条cmake编译命令:
rm -rf ./* cmake ../ make -j 6 make install -j
输入以下命令检查colmap是否安装成功(没有报错直接运行这一步):
colmap
有如下信息则说明colmap安装成功:
安装pycolmap依赖项,保证python脚本能够正常调用colmap:
pip install pycolmap
至此colmap安装完毕。
2、预处理数据集
2.1 稀疏重建、使用掩码进行点云过滤
将dtu数据集上传至autodl-tmp/Instant-angelo/data/dtu目录中,数据目录结构如下:
Instant-angelo/
├── data/dtu
│ ├── dtu_scan24/
│ │ ├── images/
│ │ │ ├── 000000.png
│ │ │ ├── 000001.png
│ │ │ └── ...
│ │ └── masks/ (可选,如果有遮罩数据)
│ ├── dtu_scan37/
│ │ ├── images/
│ │ │ ├── 000000.png
│ │ │ ├── 000001.png
│ │ │ └── ...
│ │ └── masks/ (可选)
│ └── ...由于dtu数据集里面mask目录下的掩码图片名字为000.png、001.png……,但是Instant-angelo预处理时所需要的掩码图像名称为000000.png、000001.png……。所以修改相应的文件autodl-tmp/Instant-angelo/scripts/filter_colmap.py的内容为:
import os
import cv2
from tqdm import tqdm
import numpy as np
import struct
from typing import Tuple
import time
from argparse import ArgumentParser
import shutil
import json
import click
# from https://github.com/colmap/colmap/tree/dev/scripts/python
from utils.read_write_model import read_images_binary, rotmat2qvec
from utils.read_write_dense import read_array
from utils.read_write_model import read_model, write_model
from utils.database import COLMAPDatabase
colmap_bin = 'colmap'
def run_command(command, log_message):
print(log_message)
start_time = time.time()
return_code = os.system(command)
end_time = time.time()
elapsed_time = end_time - start_time
print(f"{log_message} completed in {elapsed_time:.2f} seconds")
return elapsed_time, return_code
def create_cameras_and_points_txt(target: str, intrinsic_dict):
os.makedirs(f'{target}/model', exist_ok=True)
os.system(f'touch {target}/model/points3D.txt')
with open(f'{target}/model/cameras.txt', 'w') as f:
f.write(f'1 PINHOLE {intrinsic_dict["width"]} {intrinsic_dict["height"]} {intrinsic_dict["fx"]} {intrinsic_dict["fy"]} {intrinsic_dict["cx"]} {intrinsic_dict["cy"]}')
def project_pinhole(camera, point3D_camera):
x_normalized = point3D_camera[0] / point3D_camera[2]
y_normalized = point3D_camera[1] / point3D_camera[2]
u = camera.params[0] * x_normalized + camera.params[2]
v = camera.params[1] * y_normalized + camera.params[3]
return np.array([u, v])
def load_K_Rt_from_P(P=None):
out = cv2.decomposeProjectionMatrix(P)
K = out[0]
R = out[1]
t = out[2]
K = K / K[2, 2]
intrinsics = np.eye(4)
intrinsics[:3, :3] = K
pose = np.eye(4, dtype=np.float32)
pose[:3, :3] = R.transpose()
pose[:3, 3] = (t[:3] / t[3])[:, 0]
return intrinsics, pose
def load_from_dtu(source: str) -> Tuple[list, dict, dict, dict]:
cams = np.load(os.path.join(source, 'cameras_sphere.npz'))
id_list = list(cams.keys())
n_images = max([int(k.split('_')[-1]) for k in id_list]) + 1
pose_dict = dict()
image_dict = dict()
for i in range(n_images):
world_mat, scale_mat = cams[f'world_mat_{i}'], cams[f'scale_mat_{i}']
P = (world_mat @ scale_mat)[:3,:4]
K, c2w = load_K_Rt_from_P(P)
fx, fy, cx, cy = K[0,0], K[1,1], K[0,2], K[1,2]
# c2w[:3,1:3] *= -1. # flip input sign
# pose_dict[i] = np.linal 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 3561
3561

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









