



 本文详细记录了将uCOSIII实时操作系统移植到STM32上的过程,包括文件准备、创建测试工程、导入文件、代码完善和仿真调试。在移植过程中,创建了点亮LED和串口发送信息的任务,并在原有基础上增加了新的LED控制任务,最后通过仿真验证了系统的正确运行。
本文详细记录了将uCOSIII实时操作系统移植到STM32上的过程,包括文件准备、创建测试工程、导入文件、代码完善和仿真调试。在移植过程中,创建了点亮LED和串口发送信息的任务,并在原有基础上增加了新的LED控制任务,最后通过仿真验证了系统的正确运行。
1、文件准备
1、首先到官网下载uCOSIII的源码
然后在将下载好的文件打开,添加两个文件夹,方便之后移植
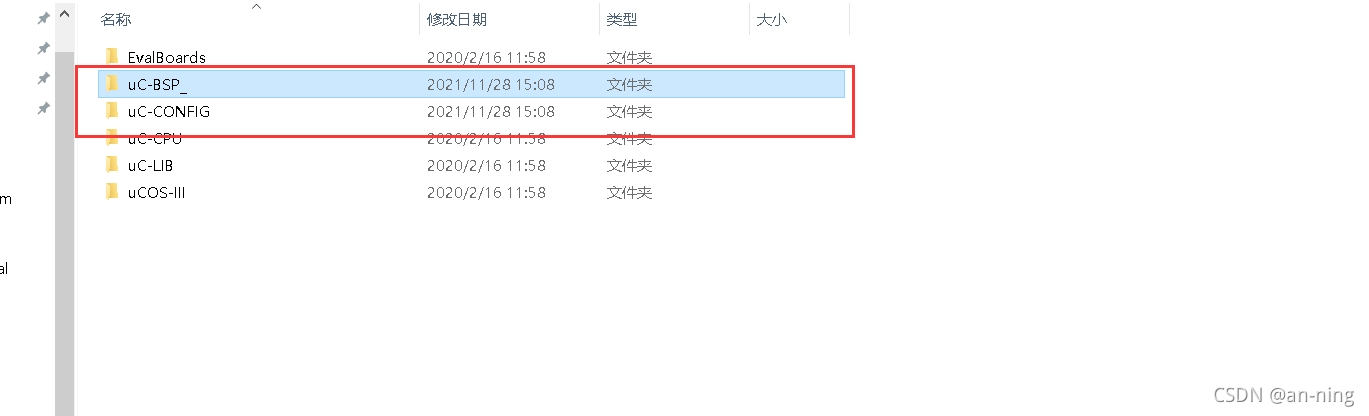
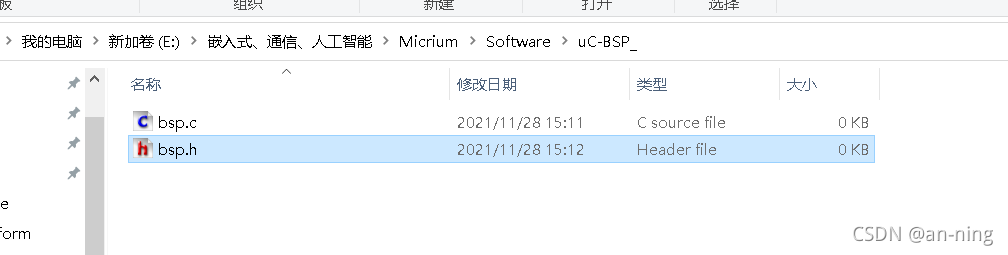
2、在uC-BSP新建bsp.c和bsp.h,空文件
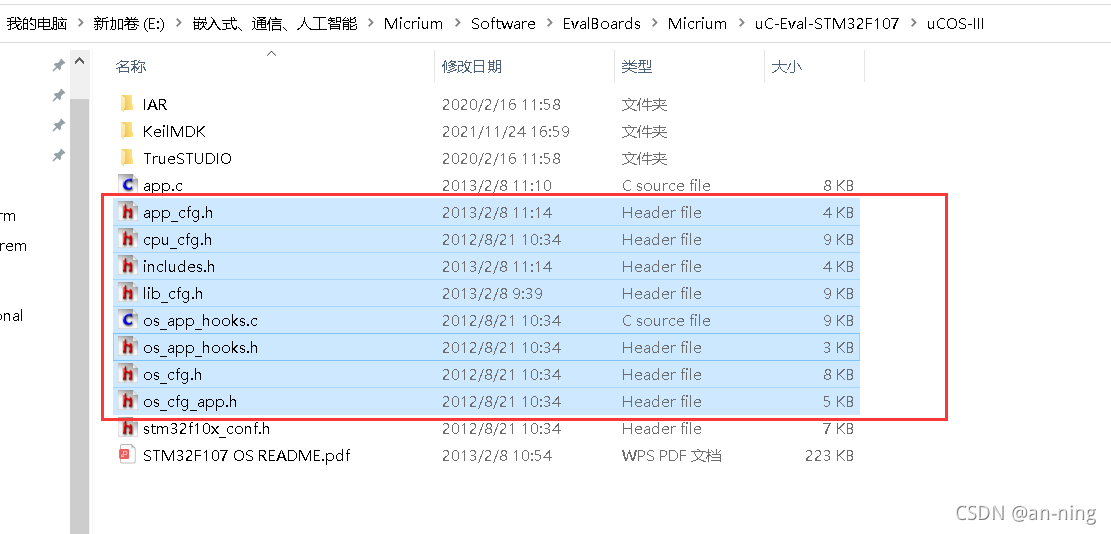
3、将下图路径中的8个文件复制到uC-CONFIG文件夹下面
2、创建测试工程项目
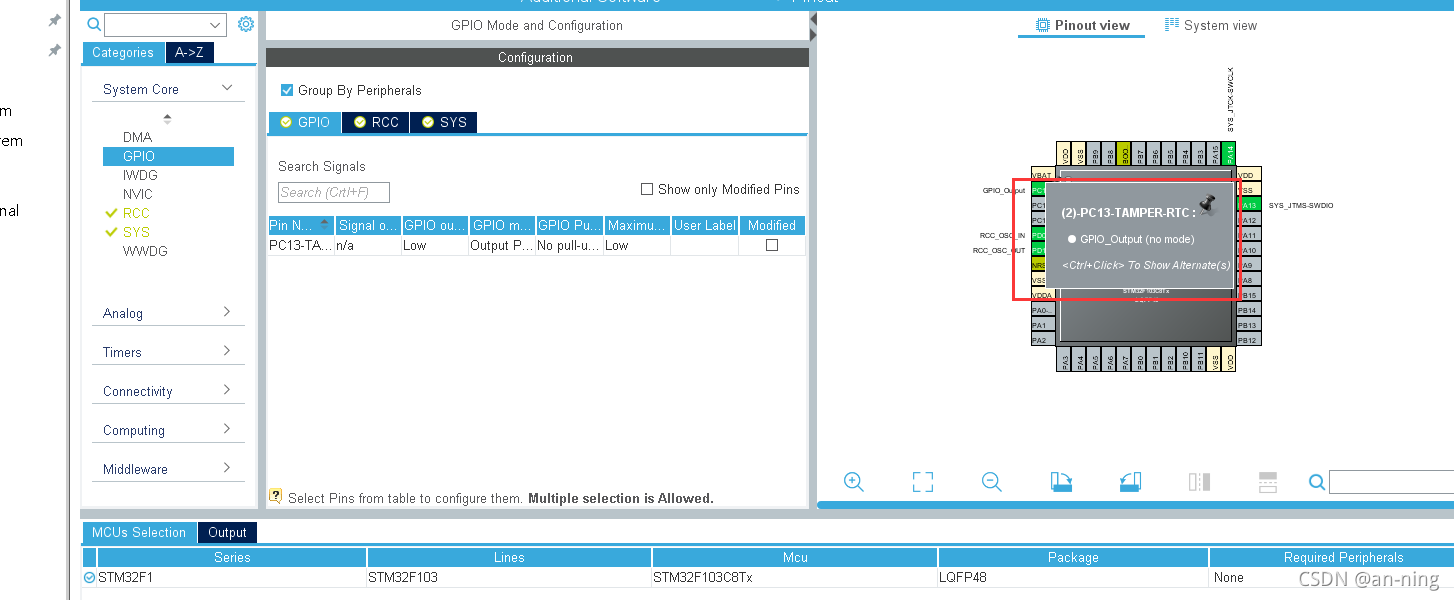
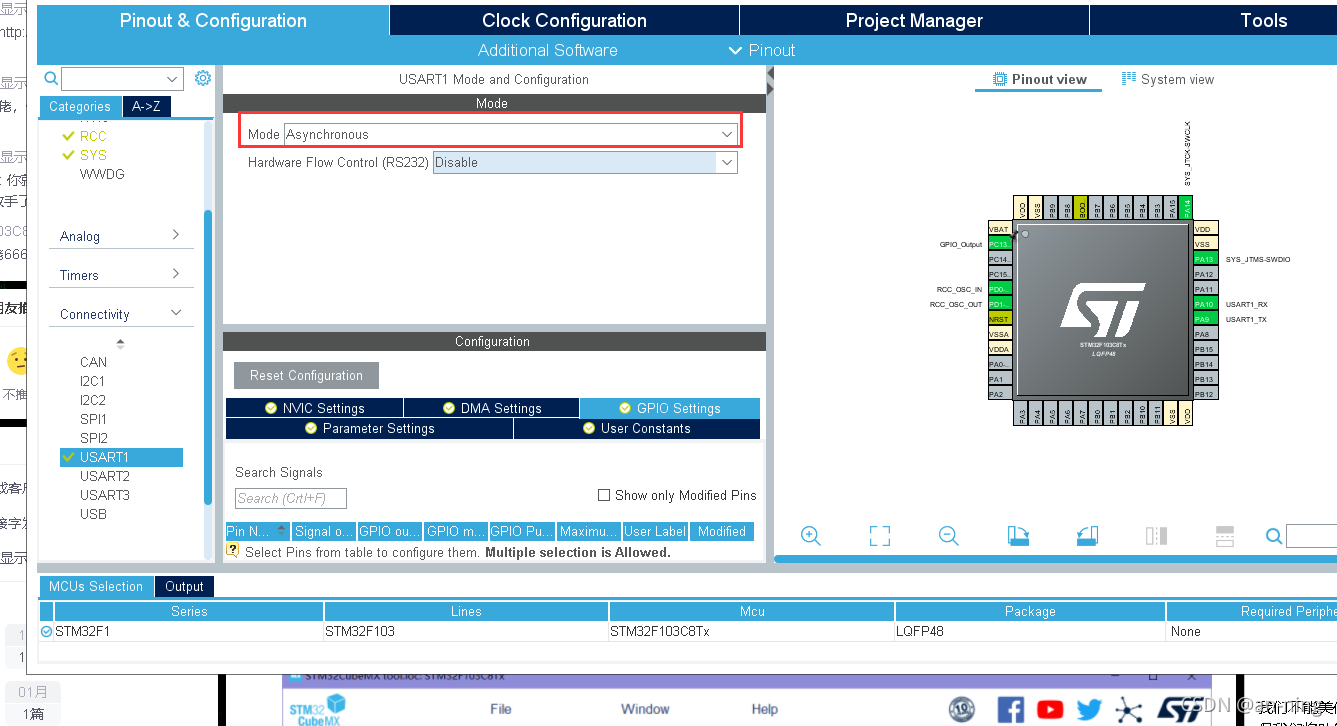
1、使用CubeMx创建一个测试程序:点亮自带的灯和串口发送信息,所以就改一下USART1的模式和将PC13引脚设置为输出就可以了,其他的和之前创建点灯程序(https://blog.youkuaiyun.com/qq_46689721/article/details/120920738)是一样的。
2、串口一的配置
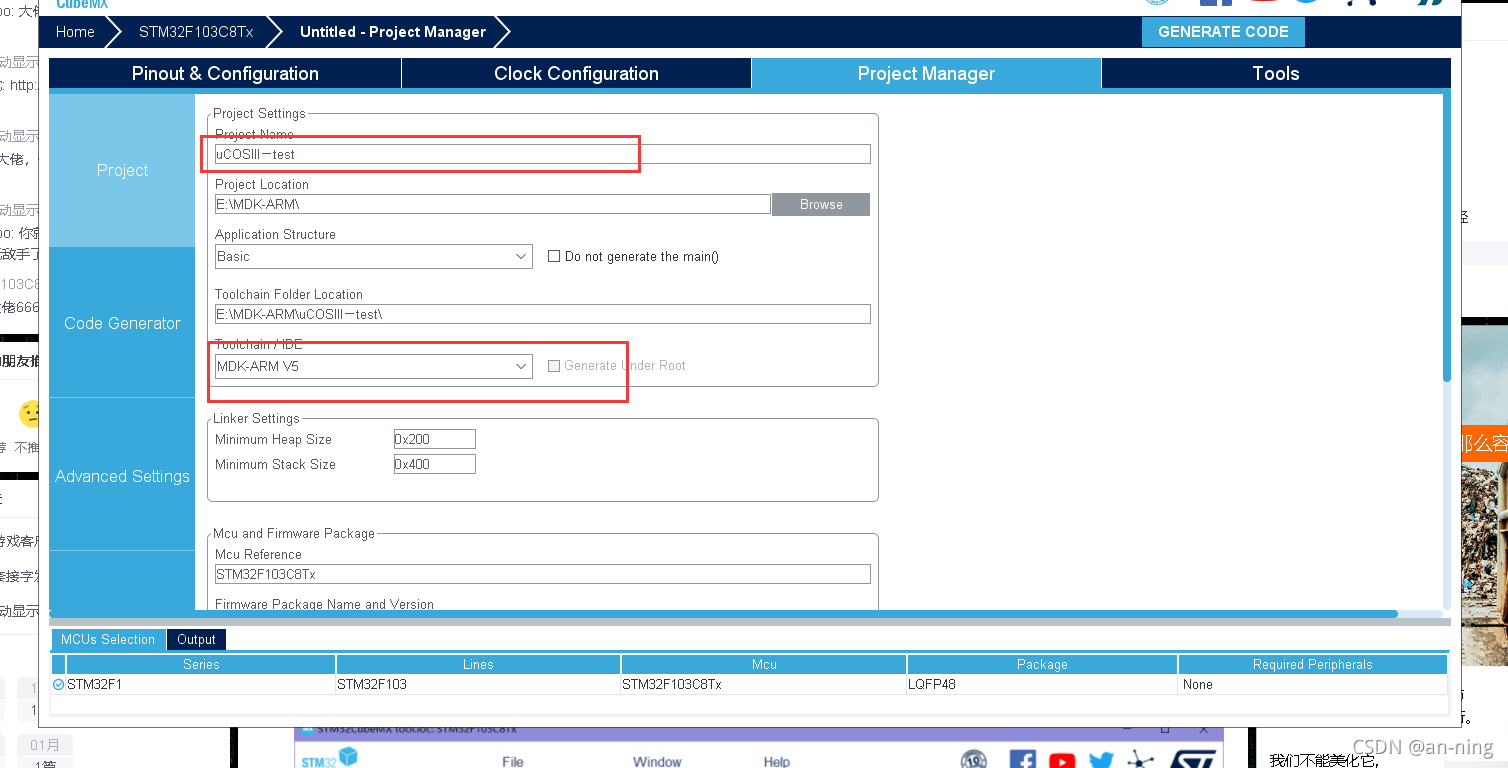
3、然后生成项目
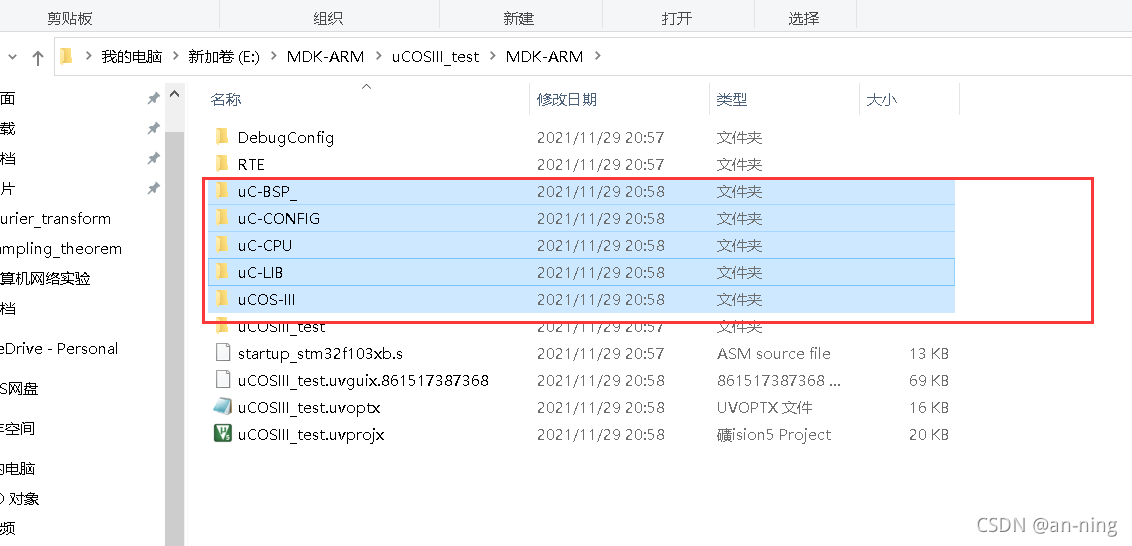
3、导入文件和增加头函数路径
1、打开创建的项目文件夹,将以下几个文件复制到其中去
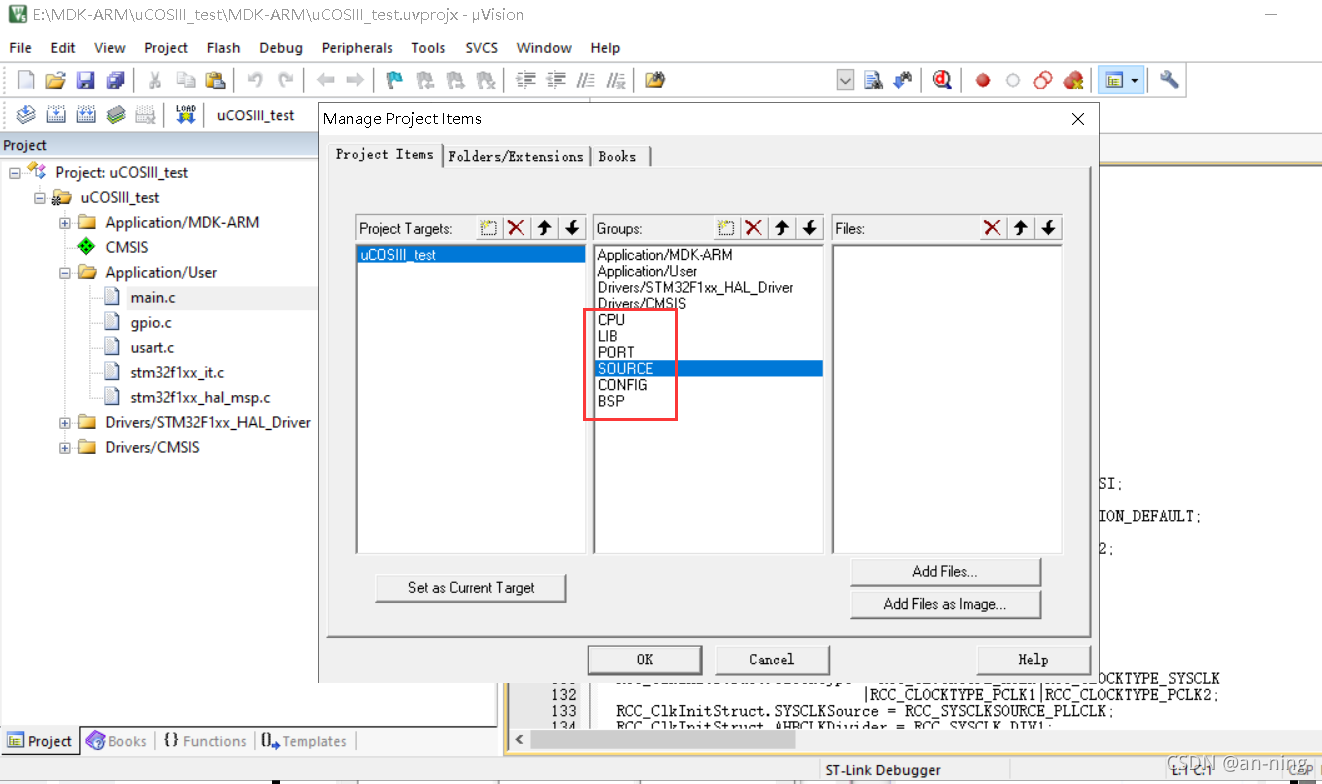
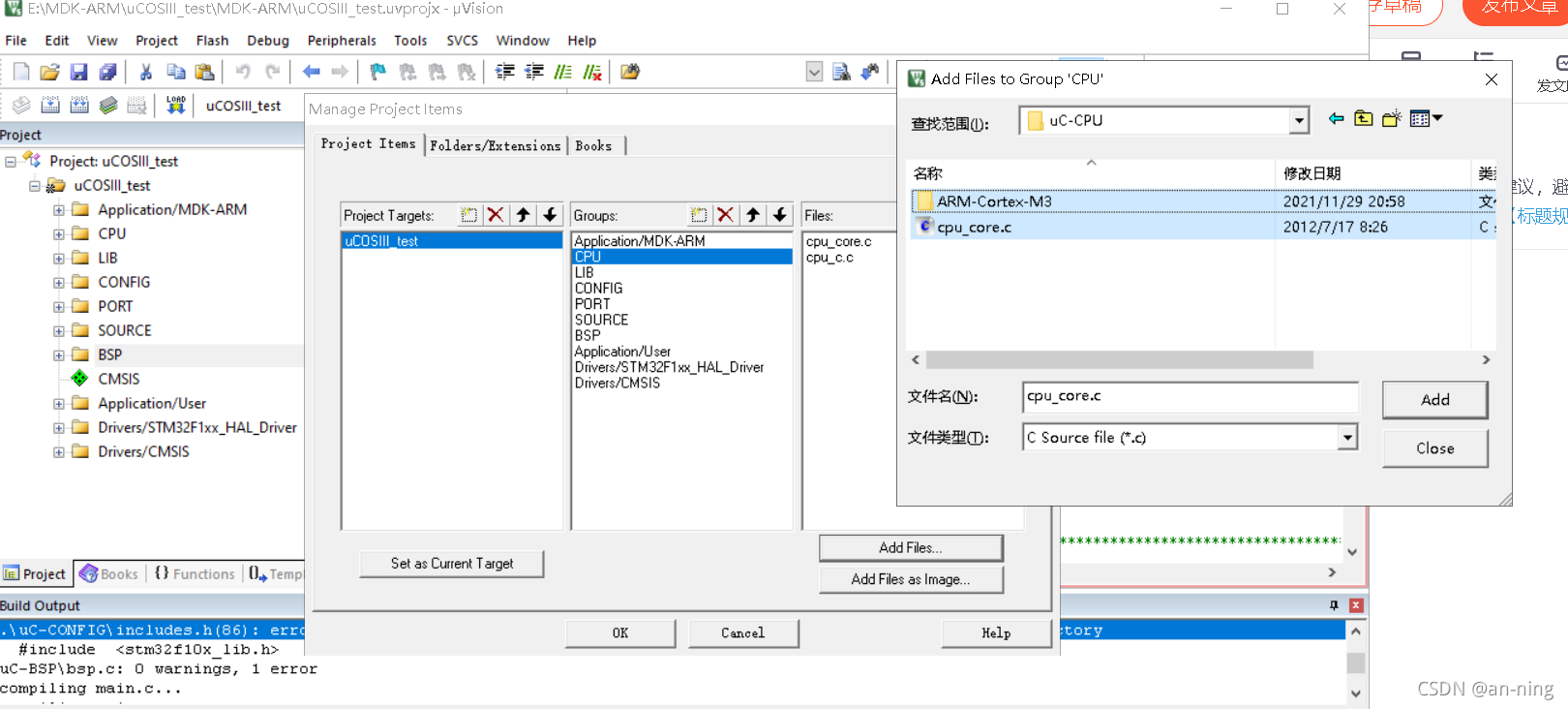
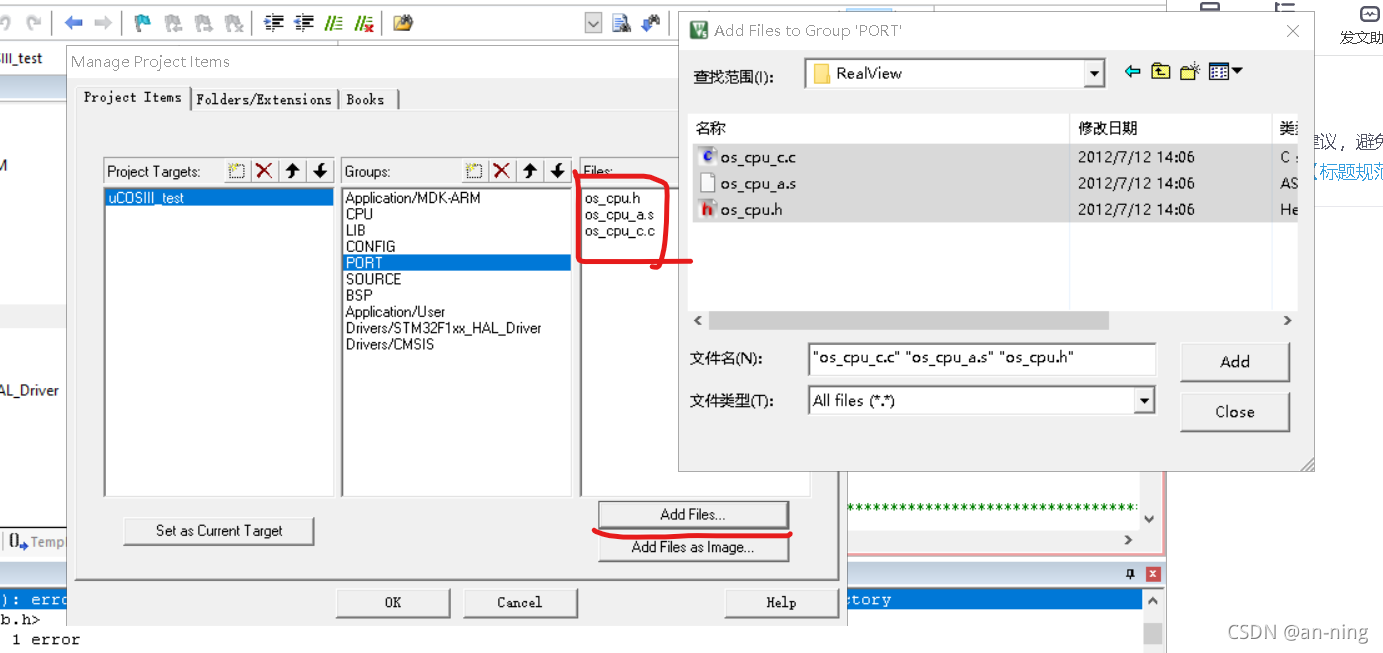
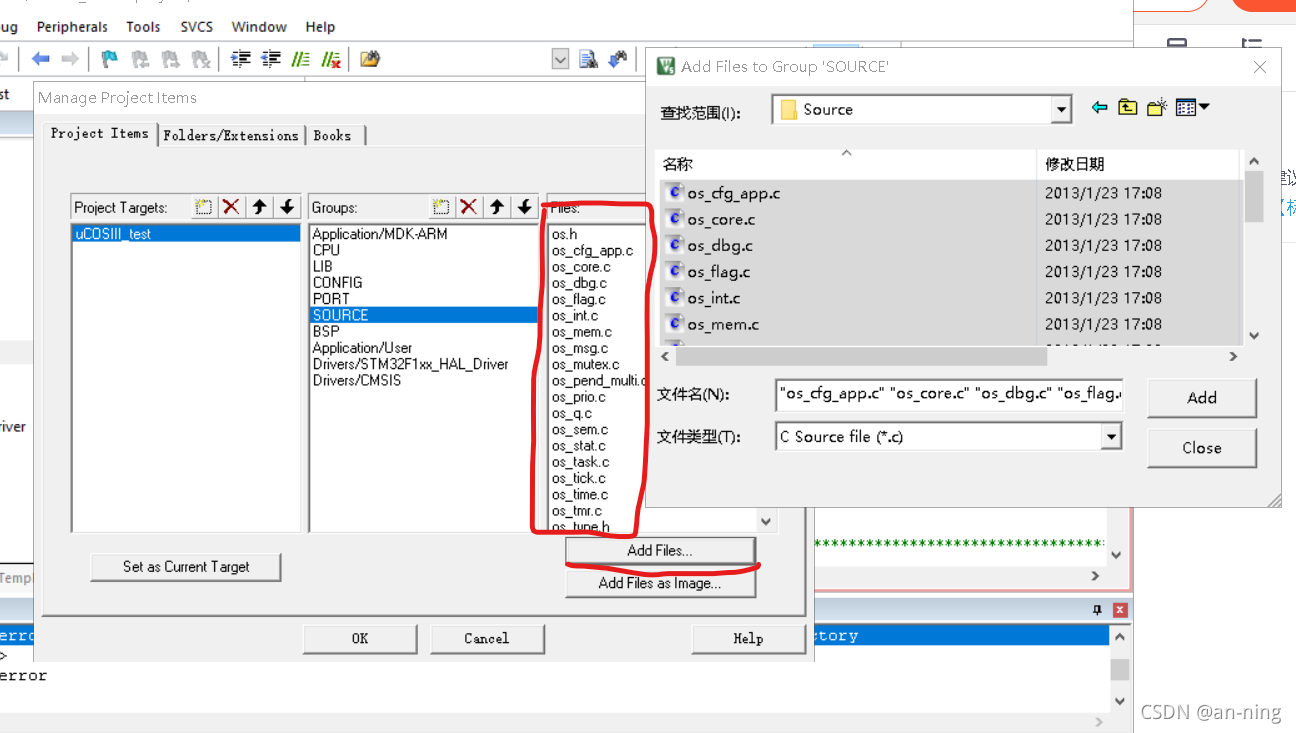
2、接下来打开keil,点击小方框增加以下几个分组
3、给CPU选择刚刚复制过去的那个文件夹里的文件,同时ARM-Cortex-M3\RealView这个路径里的asm文件选择,进行文件添加
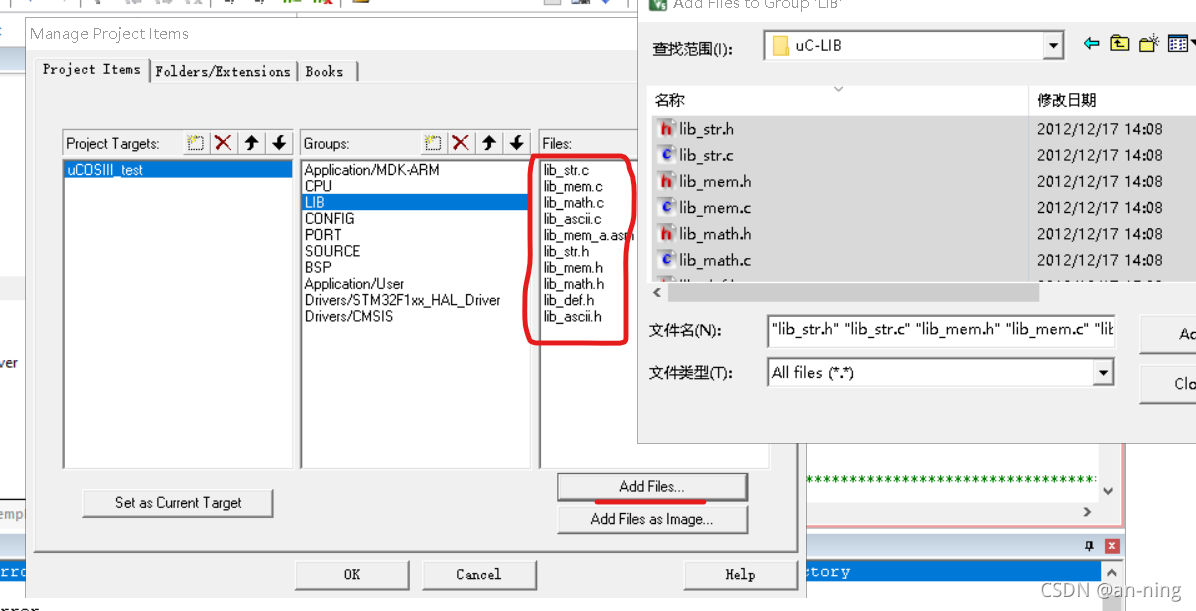
4、给LIB分组选择刚刚复制过去的那个文件夹里的文件,同时Ports\ARM-Cortex-M3\RealView这个路径里的asm文件选择,进行文件添加
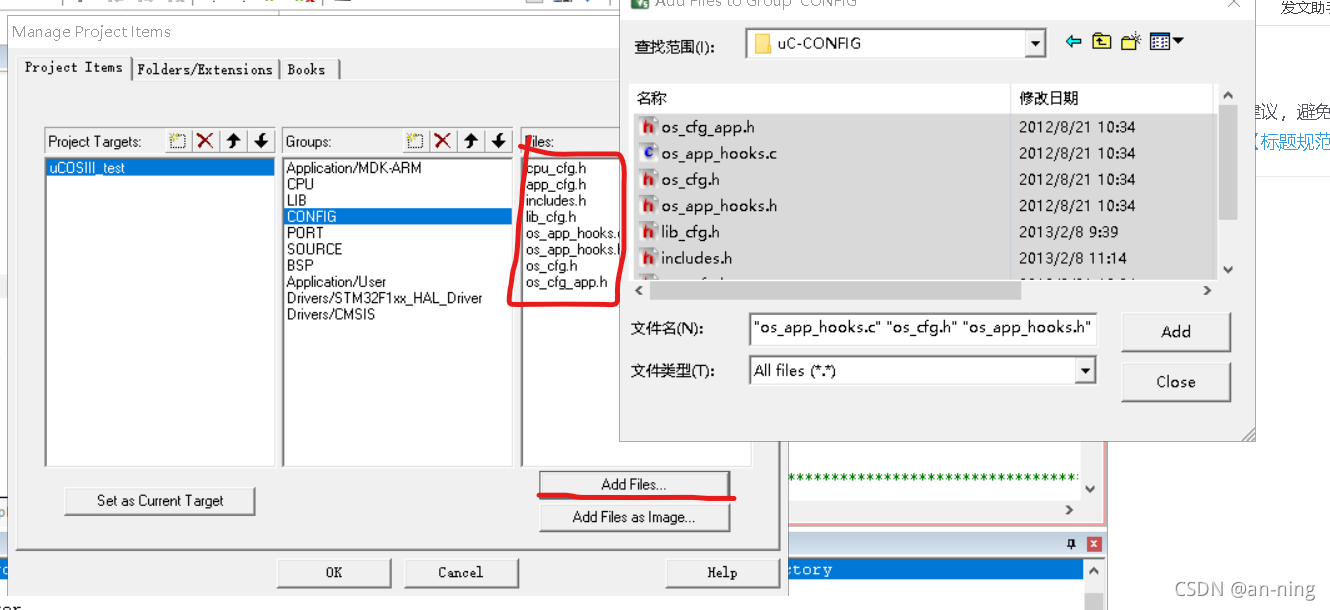
5、同样给CONFIG进行文件添加
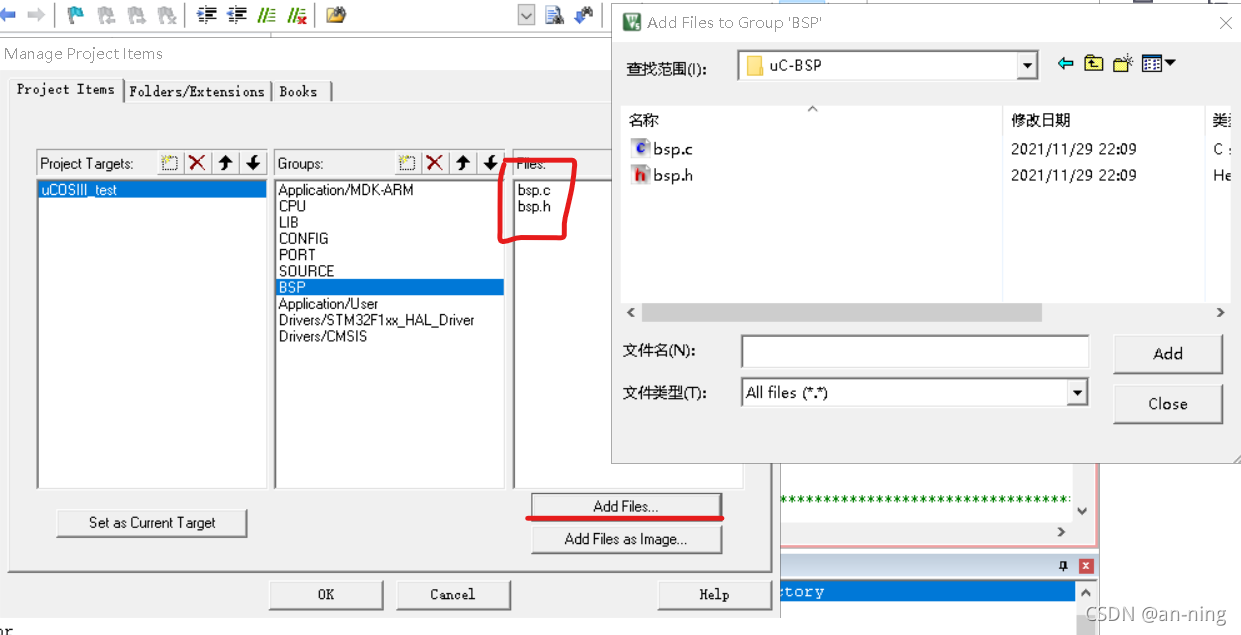
6、同样给BSP进行文件添加
7、同样给PORT进行文件添加,该添加路径为uCOS-III\Ports\ARM-Cortex-M3\Generic\RealView
8、同样给SOURCE进行文件添加,添加路径为uCOS-III\Source
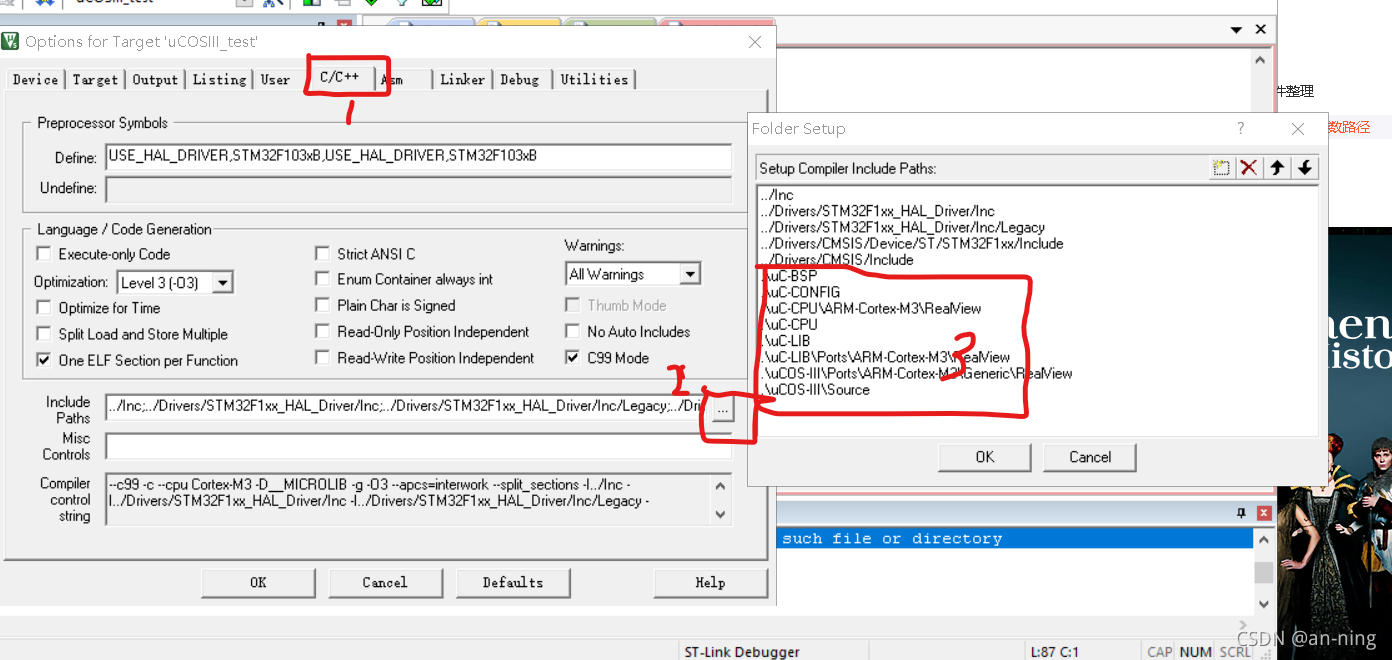
9、按照刚才的添加路径给其添加头文件
4、代码完善
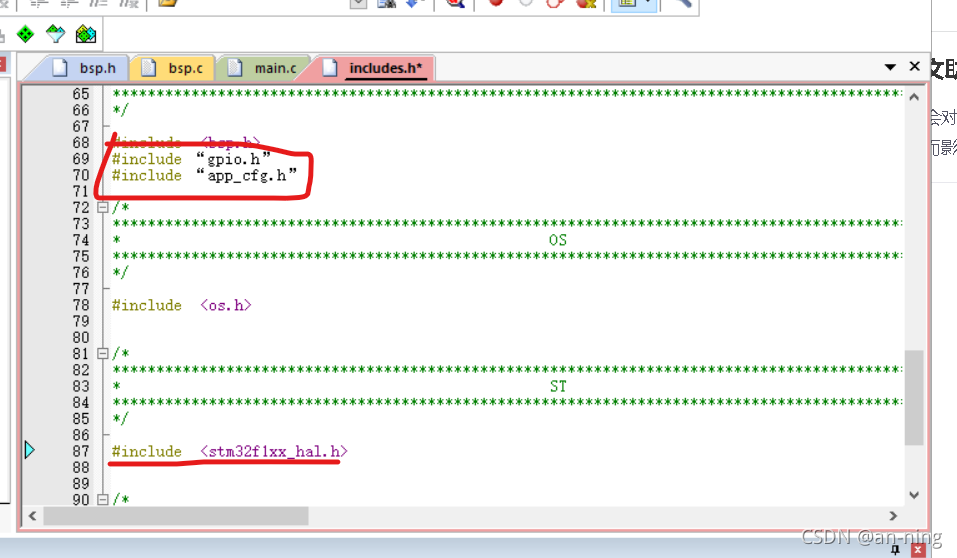
1、修改includes.h里的两个地方
1:在#include <bsp.h> 后面加上
#include “gpio.h”
#include “app_cfg.h”
2:将#include <stm32f10x_lib.h> 改为
#include “stm32f1xx_hal.h”
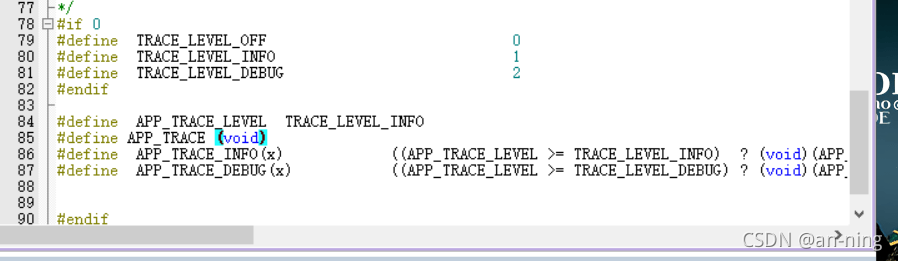
2、修改在app_cfg.h里的两处代码
1、#define APP_CFG_SERIAL_EN DEF_ENABLED 改为 #define APP_CFG_SERIAL_EN DEF_DISABLED
2、#define APP_TRACE BSP_Ser_Printf 改为 #define APP_TRACE (void)
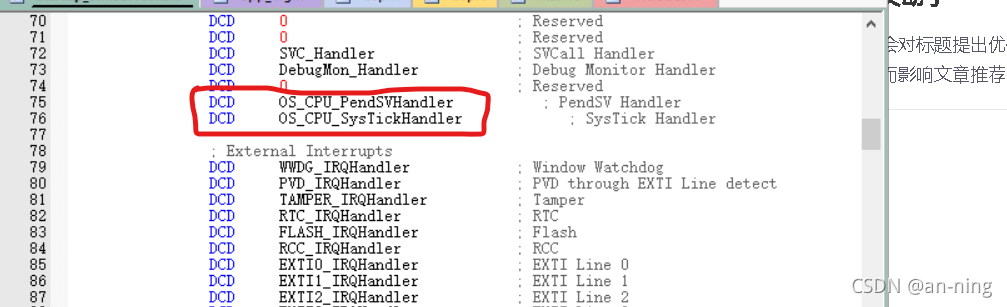
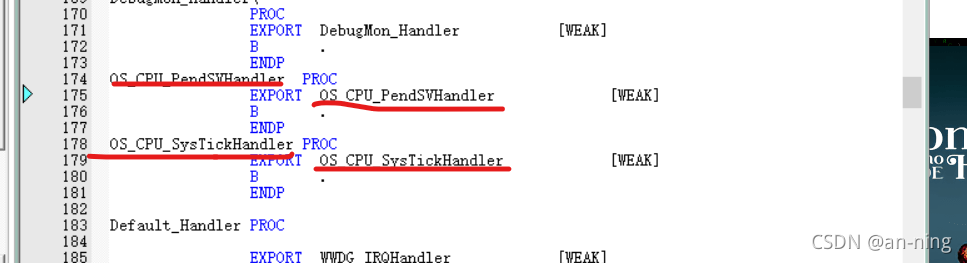
3、将启动文件里两处的PendSV_Handler和Systick_Handler改为OS_CPU_PendSVHandler和OS_CPU_SysTickHandler
4、然后给bsp.c添加代码
// bsp.c
#include "includes.h"
#define DWT_CR *(CPU_REG32 *)0xE0001000
#define DWT_CYCCNT *(CPU_REG32 *)0xE0001004
#define DEM_CR *(CPU_REG32 *)0xE000EDFC
#define DBGMCU_CR *(CPU_REG32 *)0xE0042004
#define DEM_CR_TRCENA (1 << 24)
#define DWT_CR_CYCCNTENA (1 << 0)
CPU_INT32U BSP_CPU_ClkFreq (void)
{
return HAL_RCC_GetHCLKFreq();
}
void BSP_Tick_Init(void)
{
CPU_INT32U cpu_clk_freq;
CPU_INT32U cnts;
cpu_clk_freq = BSP_CPU_ClkFreq();
#if(OS_VERSION>=3000u)
cnts = cpu_clk_freq/(CPU_INT32U)OSCfg_TickRate_Hz;
#else
cnts = cpu_clk_freq/(CPU_INT32U)OS_TICKS_PER_SEC;
#endif
OS_CPU_SysTickInit(cnts);
}
void BSP_Init(void)
{
BSP_Tick_Init();
MX_GPIO_Init();
}
#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
void CPU_TS_TmrInit (void)
{
CPU_INT32U cpu_clk_freq_hz;
DEM_CR |= (CPU_INT32U)DEM_CR_TRCENA; /* Enable Cortex-M3's DWT CYCCNT reg. */
DWT_CYCCNT = (CPU_INT32U)0u;
DWT_CR |= (CPU_INT32U)DWT_CR_CYCCNTENA;
cpu_clk_freq_hz = BSP_CPU_ClkFreq();
CPU_TS_TmrFreqSet(cpu_clk_freq_hz);
}
#endif
#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
CPU_TS_TMR CPU_TS_TmrRd (void)
{
return ((CPU_TS_TMR)DWT_CYCCNT);
}
#endif
#if (CPU_CFG_TS_32_EN == DEF_ENABLED)
CPU_INT64U CPU_TS32_to_uSec (CPU_TS32 ts_cnts)
{
CPU_INT64U ts_us;
CPU_INT64U fclk_freq;
fclk_freq = BSP_CPU_ClkFreq();
ts_us = ts_cnts / (fclk_freq / DEF_TIME_NBR_uS_PER_SEC);
return (ts_us);
}
#endif
#if (CPU_CFG_TS_64_EN == DEF_ENABLED)
CPU_INT64U CPU_TS64_to_uSec (CPU_TS64 ts_cnts)
{
CPU_INT64U ts_us;
CPU_INT64U fclk_freq;
fclk_freq = BSP_CPU_ClkFreq();
ts_us = ts_cnts / (fclk_freq / DEF_TIME_NBR_uS_PER_SEC);
return (ts_us);
}
#endif
5、添加bsp.h
// bsp.h
#ifndef __BSP_H__
#define __BSP_H__
#include "stm32f1xx_hal.h"
void BSP_Init(void);
#endif
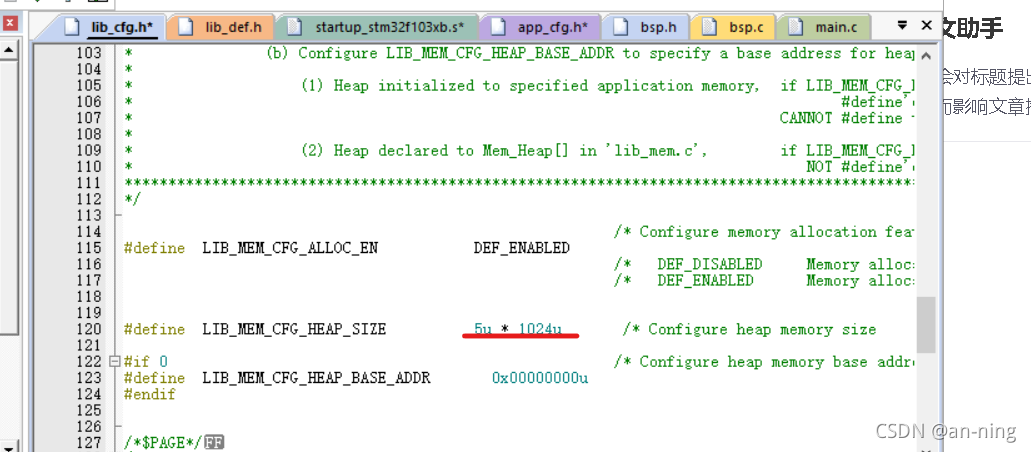
6、在lib_cfg.h里修改堆空间的宏定义,它原本是27K,但stm32f103的内存一共才20k,所以修改为5k
#define LIB_MEM_CFG_HEAP_SIZE 5u * 1024u
7、添加主函数代码
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "gpio.h"
#include "usart.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <includes.h>
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* 任务优先级 */
#define START_TASK_PRIO 3
#define LED0_TASK_PRIO 4
#define LED1_TASK_PRIO 5
#define FLOAT_TASK_PRIO 6
/* 任务堆栈大小 */
#define START_STK_SIZE 256
#define LED0_STK_SIZE 128
#define LED1_STK_SIZE 128
#define FLOAT_STK_SIZE 128
/* 任务栈 */
CPU_STK START_TASK_STK[START_STK_SIZE];
CPU_STK LED0_TASK_STK[LED0_STK_SIZE];
CPU_STK LED1_TASK_STK[LED1_STK_SIZE];
/* 任务控制块 */
OS_TCB StartTaskTCB;
OS_TCB Led0TaskTCB;
OS_TCB Led1TaskTCB;
OS_TCB FloatTaskTCB;
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* 任务函数定义 */
void start_task(void *p_arg);
static void AppTaskCreate(void);
static void AppObjCreate(void);
static void led_pc13(void *p_arg);
static void send_msg(void *p_arg);
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
OS_ERR err;
OSInit(&err);
HAL_Init();
SystemClock_Config();
//MX_GPIO_Init(); 这个在BSP的初始化里也会初始化
MX_USART1_UART_Init();
/* 创建任务 */
OSTaskCreate((OS_TCB *)&StartTaskTCB, /* Create the start task */
(CPU_CHAR *)"start task",
(OS_TASK_PTR ) start_task,
(void *) 0,
(OS_PRIO ) START_TASK_PRIO,
(CPU_STK *)&START_TASK_STK[0],
(CPU_STK_SIZE) START_STK_SIZE/10,
(CPU_STK_SIZE) START_STK_SIZE,
(OS_MSG_QTY ) 0,
(OS_TICK ) 0,
(void *) 0,
(OS_OPT )(OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR),
(OS_ERR *)&err);
/* 启动多任务系统,控制权交给uC/OS-III */
OSStart(&err); /* Start multitasking (i.e. give control to uC/OS-III). */
}
void start_task(void *p_arg)
{
OS_ERR err;
CPU_SR_ALLOC();
p_arg = p_arg;
/* YangJie add 2021.05.20*/
BSP_Init(); /* Initialize BSP functions */
//CPU_Init();
//Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); //统计任务
#endif
#ifdef CPU_CFG_INT_DIS_MEAS_EN //如果使能了测量中断关闭时间
CPU_IntDisMeasMaxCurReset();
#endif
#if OS_CFG_SCHED_ROUND_ROBIN_EN //当使用时间片轮转的时候
//使能时间片轮转调度功能,时间片长度为1个系统时钟节拍,既1*5=5ms
OSSchedRoundRobinCfg(DEF_ENABLED,1,&err);
#endif
OS_CRITICAL_ENTER(); //进入临界区
/* 创建LED0任务 */
OSTaskCreate((OS_TCB * )&Led0TaskTCB,
(CPU_CHAR * )"led_pc13",
(OS_TASK_PTR )led_pc13,
(void * )0,
(OS_PRIO )LED0_TASK_PRIO,
(CPU_STK * )&LED0_TASK_STK[0],
(CPU_STK_SIZE)LED0_STK_SIZE/10,
(CPU_STK_SIZE)LED0_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
/* 创建LED1任务 */
OSTaskCreate((OS_TCB * )&Led1TaskTCB,
(CPU_CHAR * )"led1 task",
(OS_TASK_PTR )send_msg,
(void * )0,
(OS_PRIO )LED1_TASK_PRIO,
(CPU_STK * )&LED1_TASK_STK[0],
(CPU_STK_SIZE)LED1_STK_SIZE/10,
(CPU_STK_SIZE)LED1_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
OS_TaskSuspend((OS_TCB*)&StartTaskTCB,&err); //挂起开始任务
OS_CRITICAL_EXIT(); //进入临界区
}
/**
* 函数功能: 启动任务函数体。
* 输入参数: p_arg 是在创建该任务时传递的形参
* 返 回 值: 无
* 说 明:无
*/
static void led_pc13 (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_RESET);
OSTimeDlyHMSM(0, 0, 0, 500,OS_OPT_TIME_HMSM_STRICT,&err);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_SET);
OSTimeDlyHMSM(0, 0, 0, 500,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
static void send_msg (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
printf("hello world \r\n");
OSTimeDlyHMSM(0, 0, 0, 500,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/* USER CODE BEGIN 4 */
/**
* 函数功能: 创建应用任务
* 输入参数: p_arg 是在创建该任务时传递的形参
* 返 回 值: 无
* 说 明:无
*/
static void AppTaskCreate (void)
{
}
/**
* 函数功能: uCOSIII内核对象创建
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
static void AppObjCreate (void)
{
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
8、测试结果

8、再加一盏灯,需要在gpio.c
函数里面添加函数初始化代码
/*Configure GPIO pin : PA4 */
GPIO_InitStruct.Pin = GPIO_PIN_4;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
然后在主函数里创建一个任务
/* 创建LED2任务 */
OSTaskCreate((OS_TCB * )&Led2TaskTCB,
(CPU_CHAR * )"led_pa4",
(OS_TASK_PTR )led_pa4,
(void * )0,
(OS_PRIO )LED2_TASK_PRIO,
(CPU_STK * )&LED2_TASK_STK[0],
(CPU_STK_SIZE)LED2_STK_SIZE/10,
(CPU_STK_SIZE)LED2_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
最后加上灯闪烁的代码
static void led_pa4 (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_RESET);
OSTimeDlyHMSM(0, 0, 1, 500,OS_OPT_TIME_HMSM_STRICT,&err);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_SET);
OSTimeDlyHMSM(0, 0, 1, 500,OS_OPT_TIME_HMSM_STRICT,&err);
}
}
运行结果
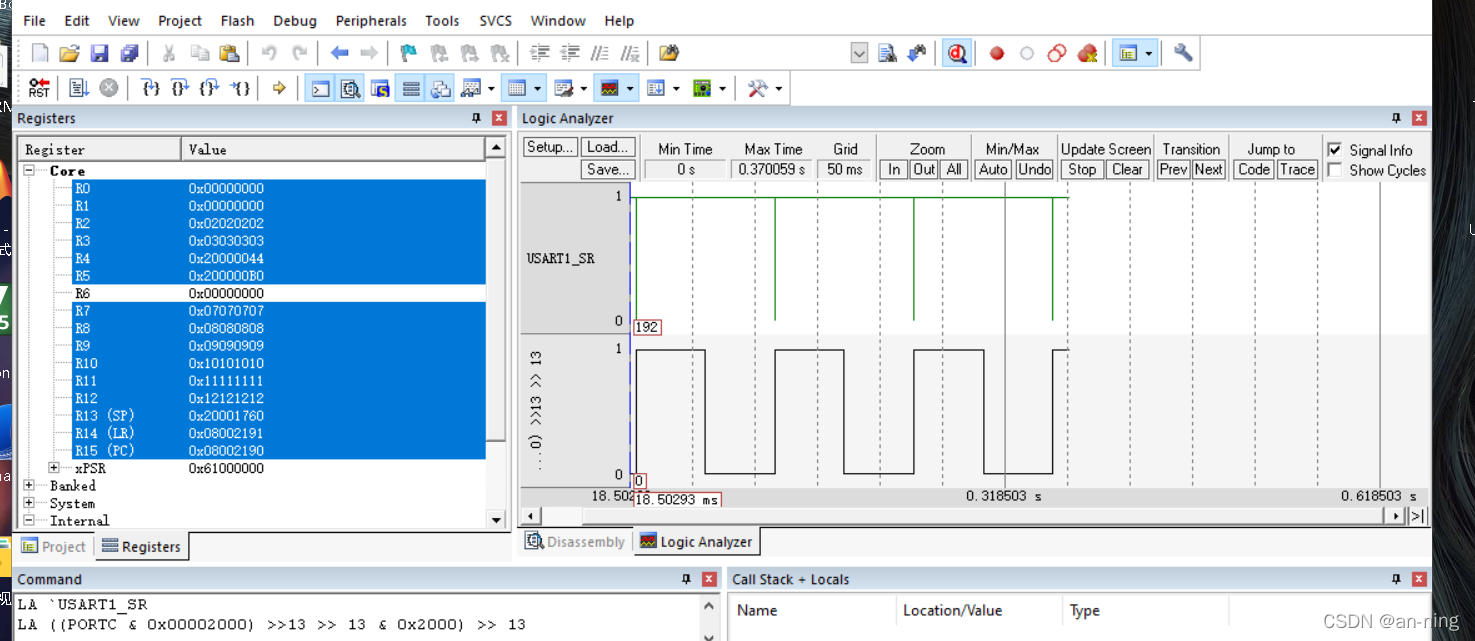
5、仿真调试
1、选择进入仿真调试
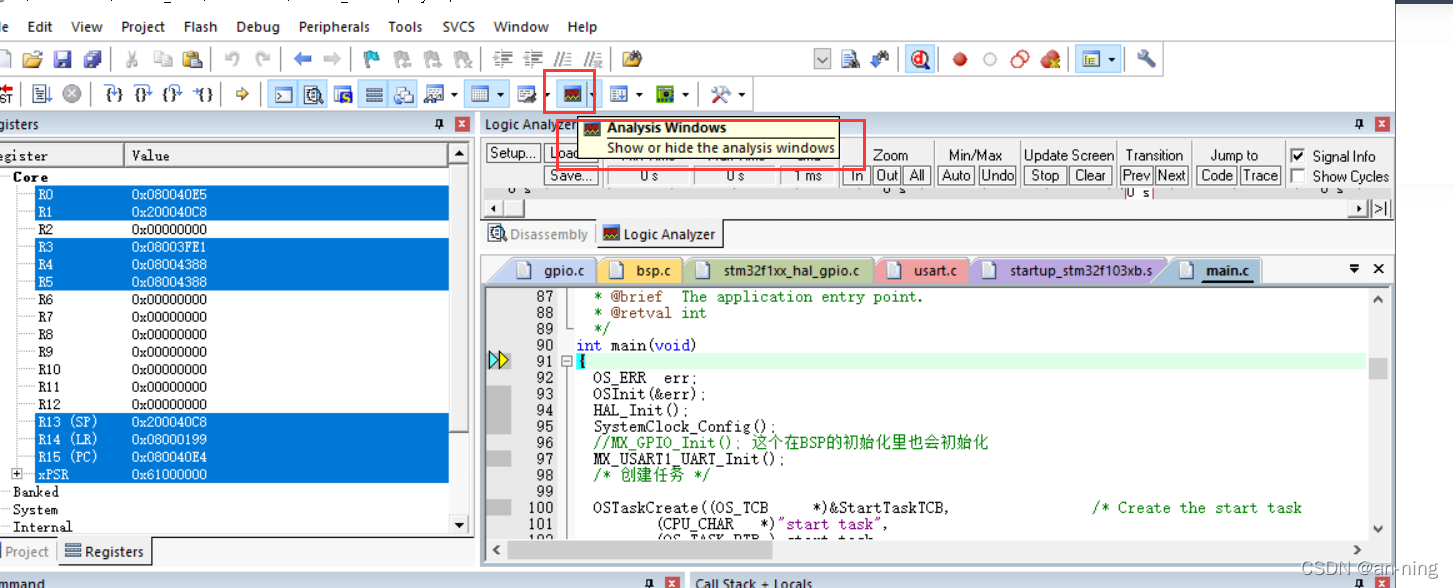
2、结果
5、总结
本次的uCOS系统移植操作系统任务虽然看起来比较简单,但是在实现的过程中还是遇到了许多的问题,我就在点亮第二盏灯的时候被困惑了许久,开始的时候一直不能成功,但是后面通过查阅相关资料才发现原因是代码里面对于延时的理解还不透彻造成的。所以说在我们学习的时候,代码产生才是基础啊。
参考:
https://blog.youkuaiyun.com/qq_45659777/article/details/121570886
https://blog.youkuaiyun.com/junseven164/article/details/121534916
https://blog.youkuaiyun.com/weixin_56102526/article/details/121624746?spm=1001.2014.3001.5501

















 586
586

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









