




1.什么是舵机
下图所示,最便宜的舵机sg90,常用三根或者四根接线,黄色为PWM信号控制
用处:垃圾桶项目开盖用、智能小车的全比例转向、摄像头云台、机械臂等
常见的有0-90°、0-180°、0-360°

黄色线接受PWM信号,红色及灰色分别接VCC和GND。
2.如何控制舵机?
上述说到黄色线接受PWM信号,通过向黄色线“灌入”PWM信号控制舵机转动。
2.1 PWM信号介绍
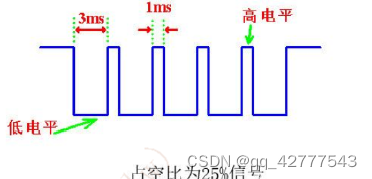
PWM,英文名Pulse Width Modulation,是脉冲宽度调制缩写,它是通过对一系列脉冲的宽度进
行调制,等效出所需要的波形(包含形状以及幅值),对模拟信号电平进行数字编码,也就是说通
过调节占空比的变化来调节信号、能量等的变化,占空比就是指在一个周期内,信号处于高电平的
时间占据整个信号周期的百分比,例如方波的占空比就是50%,如下图所示。
2.2 如何输出PWM信号
2.2.1 硬件级PWM
通过查阅芯片手册,IO会标注这个输入输出口是否为PWM口,如下图的增强c51
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2888
2888




 到【灌水乐园】发言
到【灌水乐园】发言







