



 本文介绍了使用C++实现的广度优先(BreadthFS)、最佳优先(BestFS)和A*三种寻路算法。这三种算法均利用队列进行路径搜索,不同之处在于代价函数f(n)的计算方式。文章详细描述了算法流程和数据结构设计。
本文介绍了使用C++实现的广度优先(BreadthFS)、最佳优先(BestFS)和A*三种寻路算法。这三种算法均利用队列进行路径搜索,不同之处在于代价函数f(n)的计算方式。文章详细描述了算法流程和数据结构设计。
广度优先算法、最佳优先算法、A*算法寻路程序(c++)
广度优先算法、最佳优先算法以及A*算法原理上是比较相似的,均是通过队列来寻找合适的路径。BreadthFS与BestFS是A*的特例,区别在于代价值f(n)的计算。
BreadthFS(广度优先算法):
队列结点及地图的设计:
struct QNode
{
int x, y; //该结点的地图坐标
float g; //起点到结点的距离(经过的格数,对角线为sqrt(2)格)
QNode *past; //指向前一个结点的指针
QNode *next; //队列下一个元素指针
};struct Map
{
char type, //位置类型(障碍、沼泽)
visit; //是否访问过
};
队列的设计:
class Queue
{
public:
Queue();
~Queue();
QNode *head, *last, *Search; //头指针、尾指针、搜索头指针
void InitQueue(); //初始化队列
QNode *Insert(int x, int y, char type, char maptype); //插入结点(坐标、算法类型、地图地形)
bool Delete(QNode *node); //删除node后的一个结点
bool DeleteToSearch(); //Search指针向后移动一个结点
void CleanQueue(); //清除掉路径外的多余结点
};
算法:
1. 初始化地图访问量visit,并将起点加入队列(x,y为起点坐标,g=0,past=null,next=null),置起点visit为1;
2. 循环以下3,4步,直到Search为空或Search坐标为终点坐标;
3. 搜索队列Search结点的相邻结点,如果未访问过且不是障碍,则将其插入队列,置visit为1,past为Search,g=Search->g+K * 1/sqrt(2)(K为地形属性,沼泽为2.5,草地为1,走直线则*1,走对角则*sqrt(2)),插入队列中最后一个p->g > g的结点后;
4. Search向后移动一个结点;
5. p=Search,通过past向前循环,删除past之后的结点直到p,令p=past,不断重复过程直到p=起点(即head);
6. 剩余队列及为路径。
BestFS(最佳优先算法):
主要运用贪心算法的思想,优先搜索离终点近的点。
队列结点的设计与BreadthFS相似,只是将g(到起点距离)换为了h(到终点距离):
struct QNode
{
int x, y; //该结点的地图坐标
int h; //结点到终点的距离(x,y坐标的距离求和)
QNode *past; //指向前一个结点的指针
QNode *next; //队列下一个元素指针
};算法也与BreadthFS相同,将第三步计算统计量g改为计算h,通过h的值插入结点。
A*算法:
结合了上述两种方法,在算法第三步,令f = h + g,通过f的值插入结点。
综上,我们可以定义一个队列用于三种算法,结点定义如下:
struct QNode
{
int x, y; //该结点的地图坐标
float g; //起点到结点的距离(经过的格数,对角线为sqrt(2)格)
int h; //结点到终点的距离(x,y坐标的距离求和)
QNode *past; //指向前一个结点的指针
QNode *next; //队列下一个元素指针
};算法同上,将第三步更改如下:
3. 搜索队列Search结点的相邻结点,如果未访问过且不是障碍,则将其插入队列,置visit为1,past为Search,g=Search->g+K * 1/sqrt(2)(K为地形属性,沼泽为2.5,草地为1,走直线则*1,走对角则*sqrt(2)),h=abs(x-End_x) + abs(y-End_y),如果为BreadthFS,则f=g,如果为BestFS,则f=h,如果为A*,则f=g+h,插入队列中最后一个f (p)> g的结点后。
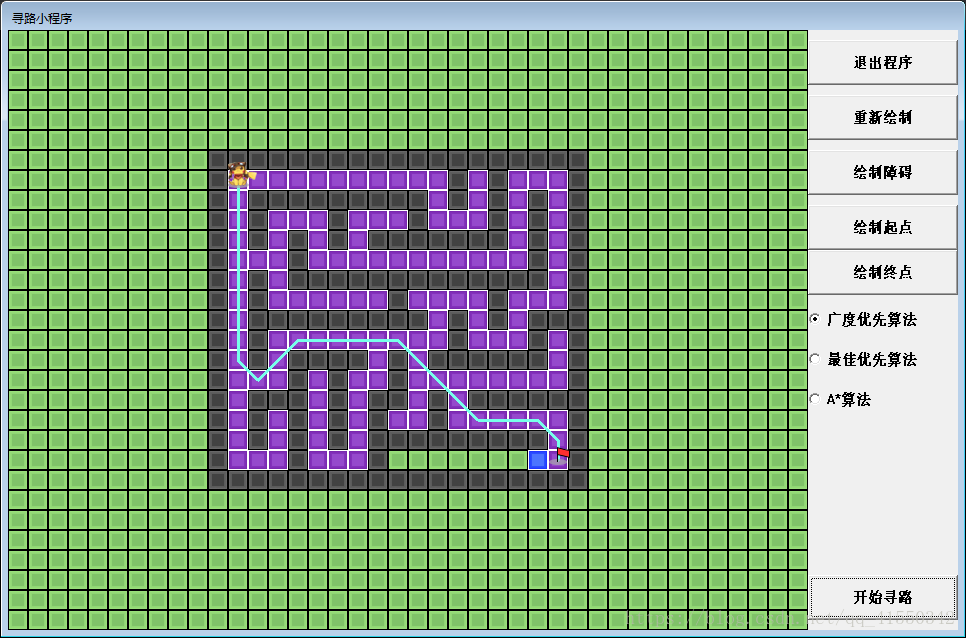
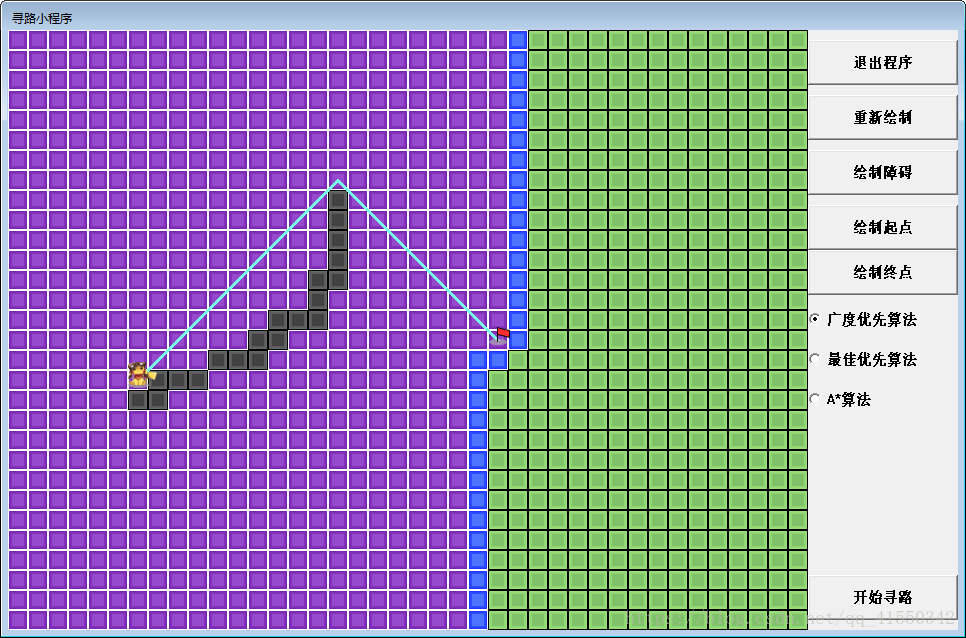
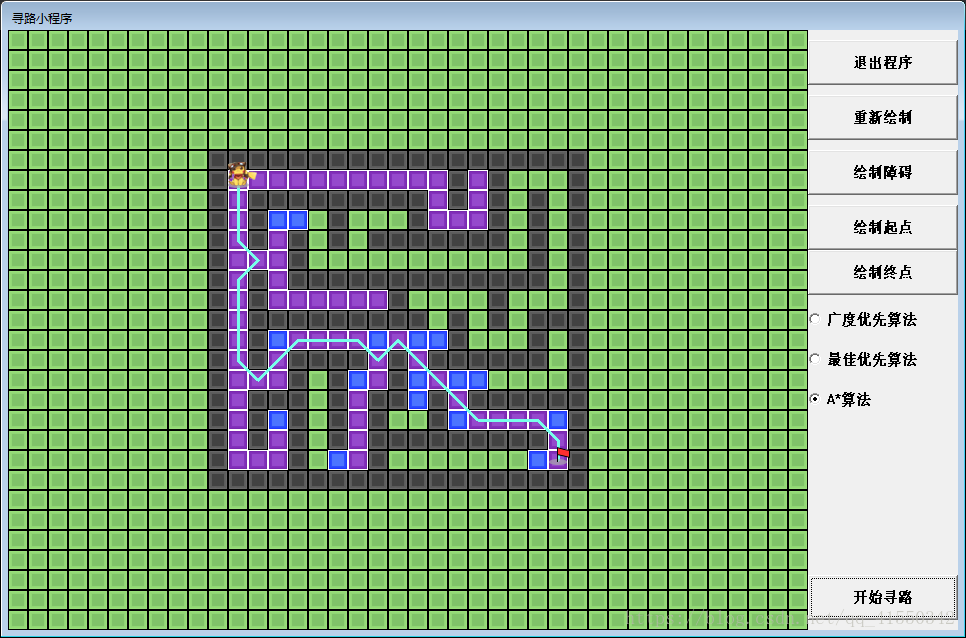
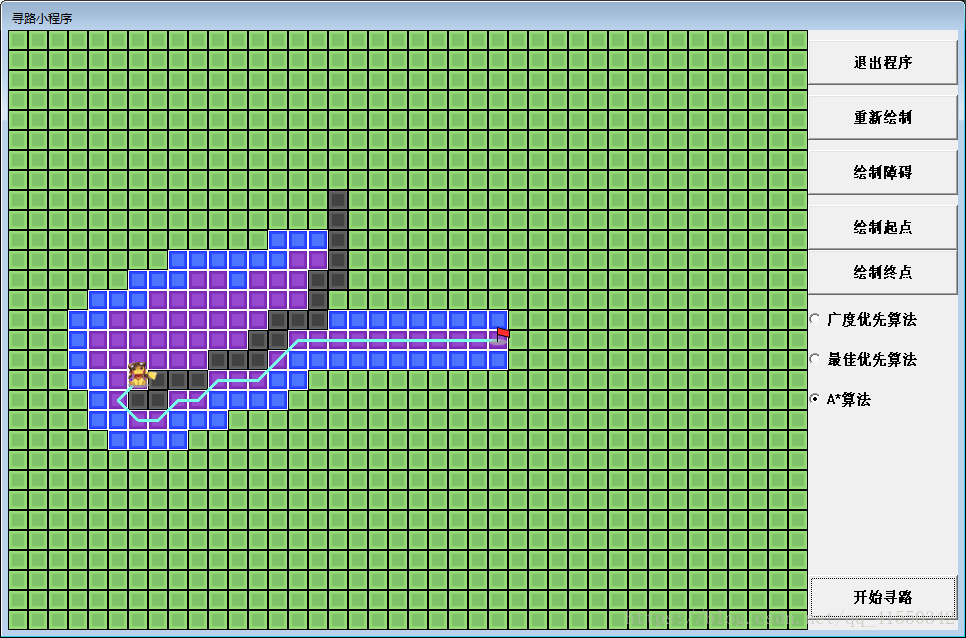
一个用三种算法寻路的程序,版本VS2015,语言c++,截图如下:
广度优先算法(迷宫为自绘):
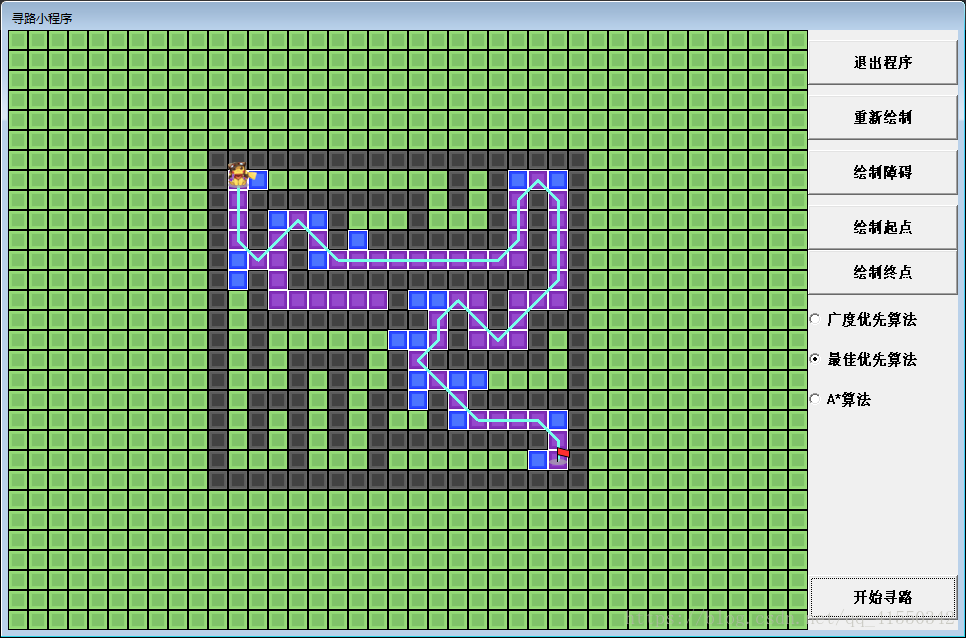
最佳优先算法:
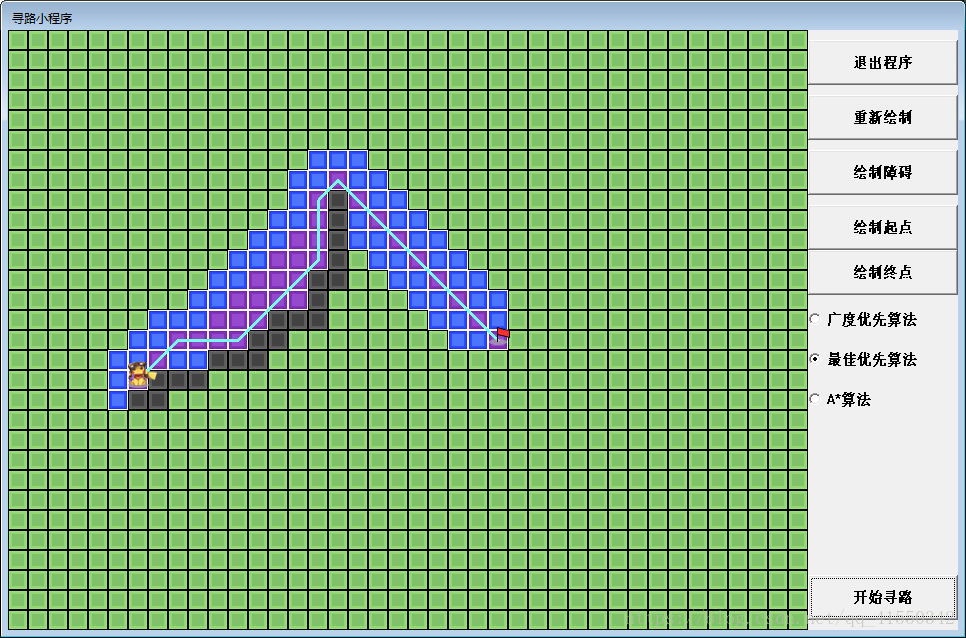
A*算法寻路程序:
下载链接:https://download.youkuaiyun.com/download/qq_41550342/10490771点击打开链接

















 1005
1005

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









