







提出关系模型的是美国IBM公司的E.F.Codd
- 1970年提出关系数据模型
E.F.Codd, “A Relational Model of Data for Large Shared Data Banks”, 《Communication of the ACM》,1970 - 之后,提出了关系代数和关系演算的概念
- 1972年提出了关系的第一、第二、第三范式
- 1974年提出了关系的BC范式
一、关系数据结构及形式化定义
1.关系
单一的数据结构——关系
- 现实世界的实体以及实体间的各种联系均用关系来表示
逻辑结构——二维表
- 从用户角度,关系模型中数据的逻辑结构是一张二维表
建立在集合代数的基础上
(1)域
一组具有相同数据类型的值的集合。
(2)笛卡尔积
给定一组域
D
1
D_1
D1,
D
2
D_2
D2,…,
D
n
D_n
Dn,允许其中某些域是相同的。
D
1
D_1
D1,
D
2
D_2
D2,…,
D
n
D_n
Dn的笛卡尔积为:
D
1
D_1
D1×
D
2
D_2
D2×…×
D
n
D_n
Dn ={(
d
1
d_1
d1,
d
2
d_2
d2,…,
d
n
d_n
dn)|
d
i
di
di
∈
\in
∈
D
i
Di
Di,i=1,2,…,n}
- 所有域的所有取值的一个组合
- 不能重复
①元组(Tuple)
笛卡尔积中每一个元素(d1,d2,…,dn)叫作一个n元组(n-tuple)或简称元组。
②分量(Component)
笛卡尔积元素(d1,d2,…,dn)中的每一个值di 叫作一个分量。
③基数(Cardinal number)
若
D
i
D_i
Di(i=1,2,…,n)为有限集,其基数为
m
i
m_i
mi(i=1,2,…,n),则
D
1
D_1
D1×
D
2
D_2
D2×…×
D
n
D_n
Dn的基数M为:
∏
i
=
1
n
m
i
\quad \prod_{i=1}^n m_i \quad
∏i=1nmi
笛卡尔积的表示方法:
- 笛卡尔积可表示为一张二维表
- 表中的每行对应一个元组,表中的每列对应一个域
(3)关系
①关系
D
1
D_1
D1×
D
2
D_2
D2×…×
D
n
D_n
Dn的子集叫作在域
D
1
D_1
D1,
D
2
D_2
D2,…,
D
n
D_n
Dn上的
关系,表示为R(
D
1
D_1
D1,
D
2
D_2
D2,…,
D
n
D_n
Dn)
- R:关系名
- n:关系的目或度(Degree)
②元组
关系中的每个元素是关系中的元组,通常用t表示。
③单元关系与二元关系
当n=1时,称该关系为单元关系(Unary relation)或一元关系
当n=2时,称该关系为二元关系(Binary relation)
④关系的表示
关系也是一个二维表,表的每行对应一个元组,表的每列对应一个域
⑤属性
关系中不同列可以对应相同的域,为了加以区分,必须对每列起一个名字,称为属性(Attribute)。n目关系必有n个属性
⑥码
- 候选码(Candidate key)
若关系中的某一属性组的值能唯一地标识一个元组,则称该属性组为候选码
简单的情况:候选码只包含一个属性 - 全码(All-key)
最极端的情况:关系模式的所有属性组是这个关系模式的候选码,称为全码(All-key) - 主码
若一个关系有多个候选码,则选定其中一个为主码(Primary key) - 主属性
候选码的诸属性称为主属性(Prime attribute)
不包含在任何侯选码中的属性称为非主属性(Non-Prime attribute)或非码属性(Non-key attribute)
⑦三类关系
- 基本关系(基本表或基表)
实际存在的表,是实际存储数据的逻辑表示 - 查询表
查询结果对应的表 - 视图表
由基本表或其他视图表导出的表,是虚表,不对应实际存储的数据
⑧基本关系的性质
- 列是同质的(Homogeneous)
- 不同的列可出自同一个域
其中的每一列称为一个属性
不同的属性要给予不同的属性名 - 列的顺序无所谓,,列的次序可以任意交换
- 任意两个元组的候选码不能相同
- 行的顺序无所谓,行的次序可以任意交换
- 分量必须取原子值(这是规范条件中最基本的一条)
2.关系模式
(1)什么是关系模式
-
关系模式(Relation Schema)是型
-
关系是值
-
关系模式是对关系的描述
元组集合的结构属性构成 属性来自的域 属性与域之间的映象关系完整性约束条件
(2)定义关系模式
关系模式可以形式化地表示为:
R(U,D,DOM,F)
R 关系名
U 组成该关系的属性名集合
D U中属性所来自的域
DOM 属性向域的映象集合
F 属性间数据的依赖关系的集合
关系模式通常可以简记为R (U) 或 R ( A 1 A_1 A1, A 2 A_2 A2,…, A n A_n An)
R: 关系名
A1,A2,…,An : 属性名
注:域名及属性向域的映象常常直接说明为属性的类型、长度
(3)关系模式与关系
关系模式
- 对关系的描述
- 静态的、稳定的
关系
- 关系模式在某一时刻的状态或内容
- 动态的、随时间不断变化的
关系模式和关系往往笼统称为关系
3.关系数据库
关系数据库
- 在一个给定的应用领域中,所有关系的集合构成一个关系数据库
关系数据库的型与值
- 关系数据库的型: 关系数据库模式,是对关系数据库的描述
- 关系数据库的值: 关系模式在某一时刻对应的关系的集合,通常称为关系数据库
4.关系模式的存储结构
关系数据库的物理组织
- 有的关系数据库管理系统中一个表对应一个操作系统文件,将物理数据组织交给操作系统完成
- 有的关系数据库管理系统从操作系统那里申请若干个大的文件,自己划分文件空间,组织表、索引等存储结构,并进行存储管理
二、关系操作
1.基本的关系操作
常用的关系操作
- 查询操作:选择、投影、连接、除、并、差、交、笛卡尔积
选择、投影、并、差、笛卡尔基是5种基本操作 - 数据更新:插入、删除、修改
关系操作的特点
- 集合操作方式:操作的对象和结果都是集合,一次一集合的方式
2.关系数据库语言的分类
关系代数语言
用对关系的运算来表达查询要求
代表:ISBL
关系演算语言:用谓词来表达查询要求
-
元组关系演算语言
谓词变元的基本对象是元组变量 代表:APLHA, QUEL -
域关系演算语言
谓词变元的基本对象是域变量 代表:QBE
具有关系代数和关系演算双重特点的语言
代表:SQL(Structured Query Language)
3.关系的完整性
实体完整性和参照完整性
- 关系模型必须满足的完整性约束条件称为关系的两个不变性,应该由关系系统自动支持
用户定义的完整性
- 应用领域需要遵循的约束条件,体现了具体领域中的语义约束
(1)实体完整性
实体完整性规则(Entity Integrity)
- 若属性A是基本关系R的主属性,则属性A不能取空值
- 空值就是“不知道”或“不存在”或“无意义”的值
实体完整性规则的说明
- 实体完整性规则是针对基本关系而言的。 一个基本表通常对应现实世界的一个实体集。
- 现实世界中的实体是可区分的,即它们具有某种唯一性标识。
- 关系模型中以主码作为唯一性标识。
- 主码中的属性即主属性不能取空值。
- 主属性取空值,就说明存在某个不可标识的实体,即存在不可区分的实体,这与第2点相矛盾,因此这个规则称为实体完整性。
(2)参照完整性
①关系间的引用
在关系模型中实体及实体间的联系都是用关系来描述的,自然存在着关系与关系间的引用。
②外码
设F是基本关系R的一个或一组属性,但不是关系R的码。如果F与基本关系S的主码 K s K_s Ks相对应,则称F是R的外码
- 基本关系R称为参照关系(Referencing Relation)
- 基本关系S称为被参照关系(Referenced Relation)或目标关系(Target Relation)
说明:
- 关系R和S不一定是不同的关系
- 目标关系S的主码Ks 和参照关系的外码F必须定义在同一个(或一组)域上
- 外码并不一定要与相应的主码同名
当外码与相应的主码属于不同关系时,往往取相同的名 字,以便于识别
参照完整性规则
若属性(或属性组)F是基本关系R的外码它与基本关系S的主码Ks相对应(基本关系R和S不一定是不同的关系),则对于R中每个元组在F上的值必须为:
- 或者取空值(F的每个属性值均为空值)
- 或者等于S中某个元组的主码值
(3)用户定义完整性
针对某一具体关系数据库的约束条件,反映某一具体应用所涉及的数据必须满足的语义要求。
关系模型应提供定义和检验这类完整性的机制,以便用统一的系统的方法处理它们,而不需由应用程序承担这一功能。
4.关系代数
关系代数是一种抽象的查询语言,它用对关系的运算来表达查询
关系代数
- 运算对象是关系
- 运算结果亦为关系
- 关系代数的运算符有两类:集合运算符和专门的关系运算符
传统的集合运算是从关系的“水平”方向即行的角度进行
专门的关系运算不仅涉及行而且涉及列
| 运算符 | 含义 | |
|---|---|---|
| 集合运算符 | ∪ | 并 |
| 集合运算符 | - | 差 |
| 集合运算符 | ∩ | 交 |
| 集合运算符 | × | 笛卡尔积 |
| 专门的关系运算符 | σ | 选择 |
| 专门的关系运算符 | π | 投影 |
| 专门的关系运算符 | ⋈ | 连接 |
| 专门的关系运算符 | ÷ | 除 |
(1)传统的集合运算
①并(Union)
R和S
- 具有相同的目n(即两个关系都有n个属性)
- 相应的属性取自同一个域
R∪S
- 仍为n目关系,由属于R或属于S的元组组成R∪S = { t|t ∈ R∨t ∈S }
②差(Difference)
R和S
- 具有相同的目n
- 相应的属性取自同一个域
R - S
- 仍为n目关系,由属于R而不属于S的所有元组组成 R -S = { t|t∈R∧t∉S }
③交(Intersection)
R和S
- 具有相同的目n
- 相应的属性取自同一个域
R∩S
- 仍为n目关系,由既属于R又属于S的元组组成R∩S = { t|t ∈ R∧t ∈S }, R∩S = R –(R-S)
④笛卡尔积(Cartesian Product)
严格地讲应该是广义的笛卡尔积(Extended Cartesian Product)
R: n目关系,
k
1
k_1
k1个元组
S: m目关系,
k
2
k_2
k2个元组
R×S
- 列:(n+m)列元组的集合
元组的前n列是关系R的一个元组
后m列是关系S的一个元组 - 行:
k
1
k_1
k1×
k
2
k_2
k2个元组
R×S = { t r t s ⏞ \overbrace{t_r t_s} trts | t r t_r tr∈R ∧ t s t_s ts∈S }
(2)专门的关系运算
先引入几个记号 :
- R,t∈R,t[
A
i
A_i
Ai]
设关系模式为R( A 1 A_1 A1, A 2 A_2 A2,…, A n A_n An)
它的一个关系设为R
t∈R表示t是R的一个元组
t[ A i A_i Ai]则表示元组t中相应于属性Ai的一个分量 - A,t[A], A
若A={ A i 1 A_{i1} Ai1, A i 2 A_{i2} Ai2,…, A i k A_{ik} Aik},其中 A i 1 A_{i1} Ai1, A i 2 A_{i2} Ai2,…, A i k A_{ik} Aik是 A 1 A_1 A1, A 2 A_2 A2,…, A n A_n An中的一部分,则A称为属性列或属性组。
t[A]=( A i 1 A_{i1} Ai1, A i 2 A_{i2} Ai2,…, A i k A_{ik} Aik)表示元组t在属性列A上诸分量的集合。
A则表示{ A 1 A_1 A1, A 2 A_2 A2,…, A n A_n An}中去掉{ A i 1 A_{i1} Ai1, A i 2 A_{i2} Ai2,…, A i k A_{ik} Aik}后剩余的属性组。 -
t
r
t
s
⏞
\overbrace{t_r t_s}
trts
R为n目关系,S为m目关系。
t r t_r tr ∈R, t s t_s ts∈S, t r t s ⏞ \overbrace{t_r t_s} trts 称为元组的连接。
t r t s ⏞ \overbrace{t_r t_s} trts 是一个n + m列的元组,前n个分量为R中的一个n元组,后m个分量为S中的一个m元组。 - 象集
Z
x
Z_x
Zx
给定一个关系R(X,Z),X和Z为属性组。
当t[X]=x时,x在R中的象集(Images Set)为:
Zx={t[Z]|t ∈ R,t[X]=x}
它表示R中属性组X上值为x的诸元组在Z上分量的集合
象集举例:
关系R:
| x 1 x_1 x1 | Z 1 Z_1 Z1 |
|---|---|
| x 1 x_1 x1 | Z 2 Z_2 Z2 |
| x 1 x_1 x1 | Z 3 Z_3 Z3 |
| x 2 x_2 x2 | Z 2 Z_2 Z2 |
| x 2 x_2 x2 | Z 3 Z_3 Z3 |
| x 3 x_3 x3 | Z 1 Z_1 Z1 |
| x 3 x_3 x3 | Z 3 Z_3 Z3 |
x
1
x_1
x1在R中的象集:
Z
x
1
Z_{x1}
Zx1 ={
Z
1
Z_1
Z1,
Z
2
Z_2
Z2,
Z
3
Z_3
Z3},
x
2
x_2
x2在R中的象集:
Z
x
2
Z_{x2}
Zx2={
Z
2
Z_2
Z2,
Z
3
Z_3
Z3},
x
3
x_3
x3在R中的象集:
Z
x
3
Z_{x3}
Zx3={
Z
1
Z_1
Z1,
Z
3
Z_3
Z3}
①选择(Selection)
选择又称为限制(Restriction)
选择运算符的含义
- 在关系R中选择满足给定条件的诸元组
σ F σ_F σF(R) = {t|t∈R∧F(t)= ‘真’} - F:选择条件,是一个逻辑表达式,取值为“真”或“假”
- 基本形式为: X 1 X_1 X1θ Y 1 Y_1 Y1
- θ表示比较运算符,它可以是>,≥,<,≤,=或<>
选择运算是从关系R中选取使逻辑表达式F为真的元组,是从行的角度进行的运算
②投影(Projection)
从R中选择出若干属性列组成新的关系
-
π
A
π_A
πA(R) = { t[A] | t ∈R }
A:R中的属性列
投影操作主要是从列的角度进行运算
投影之后不仅取消了原关系中的某些列,而且还可能取消某些元组(避免重复行)
③连接(Join)
连接也称为θ连接
连接运算的含义
- 从两个关系的笛卡尔积中选取属性间满足一定条件的元组
R ⋈ ⏟ A θ B \underbrace{⋈ }_{AθB} AθB ⋈S = { t r t s ⏞ \overbrace{t_r t_s} trts | t r t_r tr ∈ R∧ t s t_s ts ∈S∧ t r t_r tr[A]θ t s t_s ts[B] }
A和B:分别为R和S上度数相等且可比的属性组
θ:比较运算符 - 连接运算从R和S的广义笛卡尔积R×S中选取R关系在A属性组上的值与S关系在B属性组上的值满足比较关系θ的元组
两类常用连接运算:
- a、等值连接(equijoin)
- θ为“=”的连接运算称为等值连接
- 从关系R与S的广义笛卡尔积中选取A、B属性值相等的那些元组,即等值连接为: R ⋈ ⏟ A θ B \underbrace{⋈ }_{AθB} AθB ⋈S = { t r t s ⏞ \overbrace{t_r t_s} trts | t r t_r tr ∈ R∧ t s t_s ts ∈S∧ t r t_r tr[A]θ t s t_s ts[B] }
- 自然连接(Natural join)
- 自然连接是一种特殊的等值连接
- 两个关系中进行比较的分量必须是相同的属性组
- 在结果中把重复的属性列去掉
- 自然连接的含义
R和S具有相同的属性组B
R⋈S = { t r t s ⏞ \overbrace{t_r t_s} trts [U-B] | t r t_r tr ∈ R∧ t s t_s ts ∈S∧ t r t_r tr[B]= t s t_s ts[B] }
- 自然连接是一种特殊的等值连接
一般的连接操作是从行的角度进行运算。
自然连接还需要取消重复列,所以是同时从行和列的角度进行运算。
悬浮元组(Dangling tuple)
- 两个关系R和S在做自然连接时,关系R中某些元组有可能在S中不存在公共属性上值相等的元组,从而造成R中这些元组在操作时被舍弃了,这些被舍弃的元组称为悬浮元组。
外连接(Outer Join)
- 如果把悬浮元组也保存在结果关系中,而在其他属性上填空值(Null),就叫做外连接
- 左外连接(LEFT OUTER JOIN或LEFT JOIN)
只保留左边关系R中的悬浮元组 - 右外连接(RIGHT OUTER JOIN或RIGHT JOIN)
只保留右边关系S中的悬浮元组
④除运算(Division)
给定关系R (X,Y) 和S (Y,Z),其中X,Y,Z为属性组。
R中的Y与S中的Y可以有不同的属性名,但必须出自相同的
域集。
R与S的除运算得到一个新的关系P(X),P是R中满足下列条件的元组在 X 属性列上的投影:
- 元组在X上分量值x的象集
Y
x
Y_x
Yx包含S在Y上投影的集合,记作:
R÷S={tr[X]|tr∈R∧ π Y π_Y πY(S)⊆Yx}
Y x Y_x Yx:x在R中的象集,x = t r t_r tr[X]
除操作是同时从行和列角度进行运算
例:
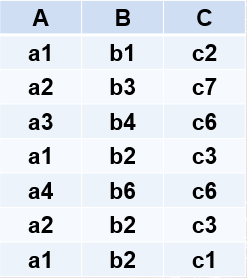
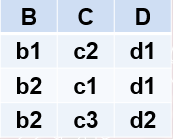
设关系R、S分别为下图的(a)和(b),R÷S的结果为图(c)
图(a)
图(b)
图(c)

- 在关系R中,A可以取四个值{
a
1
a_1
a1,
a
2
a_2
a2,
a
3
a_3
a3,
a
4
a_4
a4}
a 1 a_1 a1的象集为 {( b 1 b_1 b1, c 2 c_2 c2),( b 2 b_2 b2, c 3 c_3 c3),( b 2 b_2 b2, c 1 c_1 c1)}
a 2 a_2 a2的象集为 {( b 3 b_3 b3, c 7 c_7 c7),( b 2 b_2 b2, c 3 c_3 c3)}
a 3 a_3 a3的象集为 {( b 4 b_4 b4, c 6 c_6 c6)}
a 4 a_4 a4的象集为 {( b 6 b_6 b6, c 6 c_6 c6)} - S在(B,C)上的投影为
{( b 1 b_1 b1, c 2 c_2 c2),( b 2 b_2 b2, c 1 c_1 c1),( b 2 b_2 b2, c 3 c_3 c3) } - 只有a1的象集包含了S在(B,C)属性组上的投影
所以 R÷S ={ a 1 a_1 a1}
5.关系演算(略)
我没学这一部分。

















 458
458

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









