




 本文介绍了线性代数中的向量空间和子空间概念,包括它们的定义和性质。重点讨论了矩阵的列空间和零空间(核),阐述了如何通过矩阵的阶梯形和行简化形式来理解这些空间。此外,还解释了线性独立、基和维度的概念,并提到了矩阵的秩与子空间维度的关系。最后,讨论了四个基本子空间:列空间、零空间、行空间和左零空间及其在求解线性方程组中的应用。
本文介绍了线性代数中的向量空间和子空间概念,包括它们的定义和性质。重点讨论了矩阵的列空间和零空间(核),阐述了如何通过矩阵的阶梯形和行简化形式来理解这些空间。此外,还解释了线性独立、基和维度的概念,并提到了矩阵的秩与子空间维度的关系。最后,讨论了四个基本子空间:列空间、零空间、行空间和左零空间及其在求解线性方程组中的应用。
Chapter2 Vector Spaces
2.1 Vector Spaces and Subspaces
A real vector space is a set of vectors together with rules for vector addition and multiplication by real numbers.
A vector space need to satisfy eight rules
Definition. A subspace of a vector space is a nonempty subset that satifies the requirements for a vector spaces: Linear combination stay in the subspace.
(1) if we add any vector xxx and yyy in the subspace, x+yx + yx+y is in the subspace;
(2) if we multiply and vector xxx in the subspace by any scalar ccc, cxcxcx is in the subspace.
The Column Space of AAA
The column space contains all linear combinations of the columns of AAA. It is subspace of RmR^mRm.
2A The system Ax=bAx=bAx=b is solvable if and only if the vector bbb can be expressed as a combination of the columns of AAA. Then bbb is in the column space.
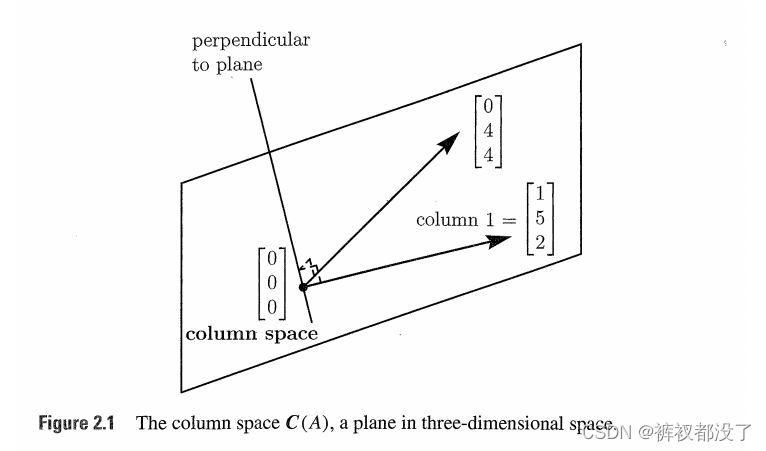
we can describe all combinations of the two columns geometrically: Ax=bAx=bAx=b can be solved if and only if bbb lies in the planes that is spanned by the two column vectors(Figure 2.1).
The Nullspace of AAA
For Ax=bAx=bAx=b, we are concerned not only with attainable right-hand sides bbb, but also with the solutions xxx that attain them. The solutions to Ax=0Ax=0Ax=0 form a vector space – the nullspace of AAA.
The nullspace of a matrix consists of all vectors xxx such that Ax=0Ax=0Ax=0. It is denoted by N(A)N(A)N(A). It is a subspace of RnR^nRn, just as the column space was a subspace of RmR^mRm.
We want to be able, for any Ax=bAx=bAx=b, to find C(A)C(A)C(A) and N(A)N(A)N(A): all attainable right-hand sides bbb and all solutions to Ax=0Ax=0Ax=0.
The vectors bbb are in the column space and the vector xxx are in the nullspace.
2.2 Solving Ax=0Ax=0Ax=0 and Ax=bAx=bAx=b
When the nullspace contains more than the zero vector and/or the column space contains less than all vectors:
-
Any vector xnx_nxn in the nullspcae can be added to a particular solution xpx_pxp. The solutions to all linear equations have this form, x=xp+xnx = x_p+x_nx=xp+xn:
Complete solution Axp=bAx_p = bAxp=b and Axn=0Ax_n = 0Axn=0 produce A(xp+xn)=bA(x_p + x_n) = bA(xp+xn)=b
-
When the column space doesn’t contain every bbb in RmR^mRm, we need the conditions on bbb that make Ax=bAx=bAx=b solvable.
Echelon Form UUU and Row Reduced Form RRR
Basic Example:A=[13322697−1−334] \text {Basic} \ \text {Example}: A = \left[\begin{matrix} 1 & 3 & 3 & 2 \\ 2 & 6 & 9 & 7 \\ -1 & -3 & 3 & 4 \end{matrix}\right] Basic Example:A=⎣⎡12−136−3393274⎦⎤
Echelon matrix:U=[133200330000] \text {Echelon} \ \text {matrix}: U = \left[\begin{matrix} 1 & 3 & 3 & 2 \\ 0 & 0 & 3 & 3 \\ 0 & 0 & 0 & 0 \end{matrix}\right] Echelon matrix:U=⎣⎡100300330230⎦⎤
There extern a lower triangular matrix LLL, make A=LUA=LUA=LU
Lower triangular:L=[100210−121] and A=LU
\text {Lower} \ \text {triangular}: L =
\left[\begin{matrix}
1 & 0 & 0 \\
2 & 1 & 0 \\
-1 & 2 & 1
\end{matrix}\right]
\ and \ \ A=LU
Lower triangular:L=⎣⎡12−1012001⎦⎤ and A=LU
2B For any mmm by nnn matrix AAA there is a permutation PPP, a lower triangular LLL with unit diagonal, and an mmm by nnn echelon matrix UUU, such that PA=LUPA=LUPA=LU.
Row Reduced Form:R=[130−100110000]
\text {Row Reduced} \ \text {Form}: R =
\left[\begin{matrix}
1 & 3 & 0 & -1 \\
0 & 0 & 1 & 1 \\
0 & 0 & 0 & 0
\end{matrix}\right]
Row Reduced Form:R=⎣⎡100300010−110⎦⎤
The matrix RRR is the final result of elimination on AAA. From RRR we will quickly find the nullspace of AAA. Rx=0Rx=0Rx=0 has the same solutions as Ux=0Ux=0Ux=0 and Ax=0Ax=0Ax=0.
Pivot Variables and Free Variables
Nullspace of R (pivot columns in boldface):R=[130−100110000][uvwy]=[000] \text{Nullspace of } R \text{ (pivot columns in boldface)} : R = \left[\begin{matrix} \bold 1 & 3 & \bold0 & -1 \\ \bold0 & 0 & \bold 1 & 1 \\ \bold0 & 0 & \bold0 & 0 \end{matrix}\right] \left[\begin{matrix} u \\ v \\ w \\ y \end{matrix}\right] = \left[\begin{matrix} 0 \\ 0 \\ 0 \end{matrix}\right] Nullspace of R (pivot columns in boldface):R=⎣⎡100300010−110⎦⎤⎣⎢⎢⎡uvwy⎦⎥⎥⎤=⎣⎡000⎦⎤
The unknowns u,v,w,yu, v, w, yu,v,w,y go into two groups. One group contains the pivot variables, those that correspond to columns with pivots, The other group is made up of the free variables, corresponding to cloums without pivots.
To find the most general solution to Rx=0Rx=0Rx=0 we may assign arbitrary values to the free variables. The pivot variables are completely determined in terms of vvv and yyy.
Rx=0 −−>u+x−y=0w+y=0−−>u=−3v+yw=−y(1)
Rx = 0 \ \ -->
\begin{matrix}
u +x -y = 0 \\
w+y =0
\end{matrix} -->
\begin{matrix}
u = -3v + y \\
w = -y
\end{matrix}
\tag1
Rx=0 −−>u+x−y=0w+y=0−−>u=−3v+yw=−y(1)
look again at this complete solution to $Rx = 0 $ and Ax=0Ax = 0Ax=0. The first special solution (−3,1,0,0)(-3, 1, 0, 0)(−3,1,0,0) has free variables v=1,y=0v=1, y=0v=1,y=0. The other special solution (1,0,−1,−1)(1, 0, -1, -1)(1,0,−1,−1) has v=0v=0v=0 and y=1y= 1y=1. All solutions are linear combinations of these two.
Nullspace contians all combinations of special solutions:x=[−3v+yv−yy]=v[−3100]+y[10−11]
\text {Nullspace contians all combinations of special solutions} :
x =\left[\begin{matrix}-3v+y \\ v \\ -y \\ y\end{matrix}\right] = v\left[\begin{matrix}-3 \\ 1 \\ 0 \\ 0\end{matrix}\right] + y\left[\begin{matrix}1 \\ 0 \\ -1 \\ 1 \end{matrix}\right]
Nullspace contians all combinations of special solutions:x=⎣⎢⎢⎡−3v+yv−yy⎦⎥⎥⎤=v⎣⎢⎢⎡−3100⎦⎥⎥⎤+y⎣⎢⎢⎡10−11⎦⎥⎥⎤
The Nullspace matrix as follow:
Nullspace matrix (columns are special solutions):N=[−31100−101]
\text{Nullspace matrix (columns are special solutions)}: N =
\left[\begin{matrix}
-3 & 1 \\
1 & 0 \\
0 & -1 \\
0 & 1
\end{matrix}\right]
Nullspace matrix (columns are special solutions):N=⎣⎢⎢⎡−310010−11⎦⎥⎥⎤
2C If Ax=0Ax = 0Ax=0 has more unknowns than equations(n > m), it has at least one special solution: There are more solutions than the trivial x=0x= 0x=0
The nullspace has the same “dimension” as the number of free variables and special solutions.
Solving Ax=b,Ux=cAx=b, Ux = cAx=b,Ux=c and $Rx=d $
For the original example Ax=b=(b1,b2,b3)=(1,5,5)Ax=b=(b_1, b_2, b_3) =(1,5,5)Ax=b=(b1,b2,b3)=(1,5,5), apply to both sides the operations that led from AAA to UUU, The result is an upper triangular systems Ux=cUx=cUx=c:
Ux=c [133200330000][uvwy]=[b1b2−2b1b3−2b2+5b1]
Ux = c \ \ \ \ \ \ \ \
\left[\begin{matrix}
1 & 3 & 3 & 2 \\
0 & 0 & 3 & 3 \\
0 & 0 & 0 & 0
\end{matrix}\right]
\left[\begin{matrix}
u \\
v \\
w \\
y
\end{matrix}\right] =
\left[\begin{matrix}
b_1 \\
b_2 - 2b_1 \\
b_3 - 2b_2 + 5b_1 \\
\end{matrix}\right]
Ux=c ⎣⎡100300330230⎦⎤⎣⎢⎢⎡uvwy⎦⎥⎥⎤=⎣⎡b1b2−2b1b3−2b2+5b1⎦⎤
Every solution to Ax=bAx=bAx=b is the sum of one particular solution and a solution to Ax=0Ax= 0Ax=0 :
xcomplete=xparticular+xnullspace
x_{complete} = x_{particular} + x_{nullspace}
xcomplete=xparticular+xnullspace
The particular solution comes from solving the equation with all free virables set to zero.
Question: How does the reduced form RRR make this solution even clearer?
Rx=d [130100110000][uvwy]=[−210]
Rx = d \ \ \ \ \ \ \ \ \ \ \ \ \ \
\left[\begin{matrix}
1 & 3 & 0 & 1 \\
0 & 0 & 1 & 1 \\
0 & 0 & 0 & 0
\end{matrix}\right]
\left[\begin{matrix}
u \\
v \\
w \\
y
\end{matrix}\right] =
\left[\begin{matrix}
-2 \\
1 \\
0
\end{matrix}\right]
Rx=d ⎣⎡100300010110⎦⎤⎣⎢⎢⎡uvwy⎦⎥⎥⎤=⎣⎡−210⎦⎤
The entries of ddd go directly into xpx_pxp.
2D Suppose elimination reduces Ax=bAx=bAx=b to Ux=cUx=cUx=c and Rx=dRx=dRx=d, with rrr pivot rows and rrr pivot columns. The rank of those matrices is rrr. The last m−rm-rm−r rows of UUU and RRR are zero, so there is a solution only if the last m−rm-rm−r entries of ccc and ddd are also zero.
2.3 Linear Independence, Basis, and Dimension
Linear Independece
2E Suppose c1v1+⋯+ckvk=0c_1v_1+\dots+c_kv_k =0c1v1+⋯+ckvk=0 only happens when c1=⋯=ck=0c_1=\dots = c_k =0c1=⋯=ck=0. Then the vectors v1,…,vkv_1, \dots, v_kv1,…,vk are linearly independent. If any ccc's are nonzero, the vvv's are linearly dependent. One vector is a combination of the others.
The columns of AAA are independent exactly when N(A)={zero vector}N(A) = \{zero\ vector\}N(A)={zero vector}
The rrr nonzero rows of an echelon matrix UUU and a reduced matrix RRR are linearly independent. So are the rrr columns that contain pivots
Every system Ac=0Ac=0Ac=0 with more unknowns than equations has solution c≠0c \neq 0c=0
Spanning a Subspace
2H If a vector space VVV consists of all linear combinations of w1,…wlw_1, \dots w_lw1,…wl, then these vectors span the space. Every vector vvv in VVV is the combination of the www's:
Every vvv comes from www's v=c1w1+⋯+clwlv=c_1w_1 + \dots + c_lw_lv=c1w1+⋯+clwl for some coefficients cic_ici.
Basis for a Vector Space
Spanning involves the column space, and independence involoves the nullspace
2I A basis for VVV is a sequence of vectors having two properties at once:
- The vectors are linearly independent (not too many vectors)
- **They span the space VVV (not too few vectors) **
Dimension of a Vector Space
**The number of basis vector is a property of the space itself : **
2J Any two bases for a vector space VVV contains same number of vectors. This number, which is shared by all bases and expresses the number of “degree of freedom” of the space, is the dimension of VVV.
The dimension of a space is the number of vectors in every basis.
A basis is a maximal independent set. A basis is also a minimal spanning set.
The notation “dimension” : We speak about a four-dimensional vector, meaning a vector in R4R^4R4. Now we have defined a four-dimensional subspace; an example is the set of vectors in R6R^6R6 whose first and last components are zero.
rank(A)=#piovt colums= dimension of column spacedimension(N(A))=#free variables=n−r
rank(A) = \# \text{piovt colums} = \text{ dimension of column space} \\
dimension(N(A) ) = \# \text{free variables} = n -r
rank(A)=#piovt colums= dimension of column spacedimension(N(A))=#free variables=n−r
2.4 The Four Fundamental Subspaces
Subspace can be described in two ways. First, we may give a set of vectors that span the space. Second, we may told which conditions the vectors in the space must satisfy. (Example: The nullspace consists of all vectors that satisfy Ax=0Ax=0Ax=0)
When the rank is as large as possible, r=nr=nr=n or r=mr=mr=m or r=n=mr=n=mr=n=m, the matrix has a left-inverse BBB or a right-inverse CCC or a two-sided A−1A^{-1}A−1.
The following introduce four subspaces:
- The column subspace of AAA is denoted by C(A)C(A)C(A). Its dimension is the rank rrr.
- The nullspace of AAA is denoted by N(A)N(A)N(A). Its dimension is n−rn-rn−r.
- The row space of AAA is the column space of ATA^TAT. It is C(AT)C(A^T)C(AT), and it is spanned by the rows of AAA. Its dimension is the rank r.
- The left nullspace of AAA is the nullspace of ATA^TAT. It contains all vectors yyy such that $A^Ty =0 $, and it is written N(AT)N(A^T)N(AT). Its dimension is m−rm-rm−r.
The nullspace of AAA and row space C(AT)C(A^T)C(AT) are subspace of RnR^nRn.
The left nullspace N(AT)N(A^T)N(AT) and column space C(A)C(A)C(A) are subspace of RnR^nRn
3 The row space of AAA
**2M The row space of AAA has the same dimension rrr as the row space of UUU, and it has the same bases, because the row spaces of AAA and UUU(and RRR) are the same **
2 The nullspace of AAA
2N The nullspace N(A)N(A)N(A) has dimension n−rn-rn−r. The “special solutions” are a basis-- each free variable is given the value 1, while the other free vaiables are 0. The Ax=0Ax=0Ax=0 or Ux=0Ux=0Ux=0 or Rx=0Rx=0Rx=0 gives the pivot variables by back-substitution.
The nullspace is also called the kernel of AAA, and its dimension n−rn-rn−r is the nullity.
1 The column space of AAA
2O The dimension of the column space C(A)C(A)C(A) equals the rank rrr, which also equals the dimension of the row space: The number of independent columns equals the number of independent rows. A basis for C(A)C(A)C(A) is formed by the rrr columns of AAA that correspond, in UUU, to the columns containing pivots.
4 The left nullspace of AAA (= nullspace of ATA^TAT)
2P The left nullspace N(AT)N(A^T)N(AT) has dimension m−rm-rm−r
Existence of inverses
We want to prove that when r=mr=mr=m there is a right-inverse, and Ax=bAx=bAx=b always has a solutioin. When r=nr=nr=n there is a left-inverse, and the solution(if it exists) is unique.

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









