



批量执行数据

批量执行数据2
 接口关联json
接口关联json
固定计时器:在固定时间之后开始请求

断言XPath断言

集合点,在同时间一起请求

请求默认值:在该页面输入的数据都是默认值

事务控制器:多个接口一起组合为一个整体

循环控制器:控制包含的接口循环次数

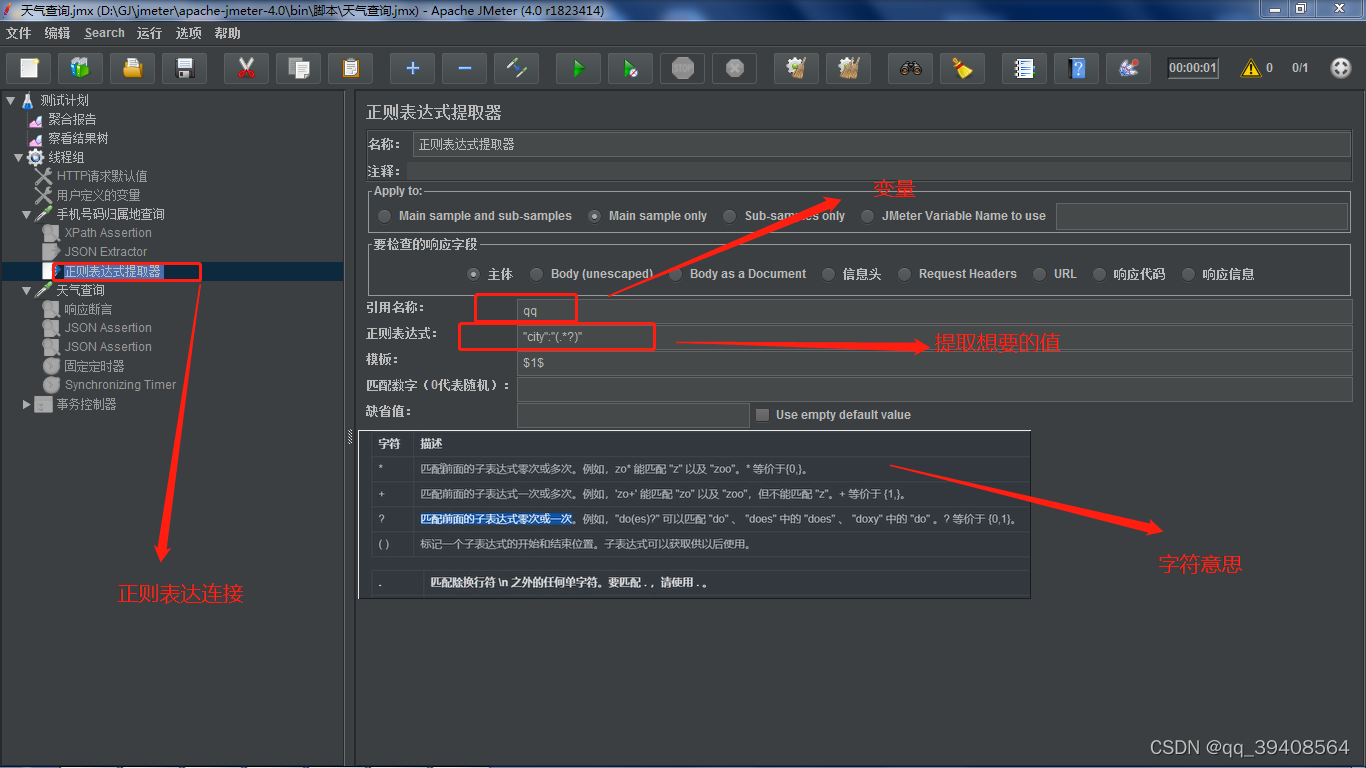
正则表达式:关联表
模拟器录制接口

 本文探讨了批量执行数据的策略,包括固定计时器、XPath断言、集合点和事务控制器等关键概念。同时,讲解了如何利用循环控制器控制接口的循环次数,以及正则表达式在接口关联中的应用。此外,还介绍了模拟器录制接口在测试流程中的作用,对于提升自动化测试效率具有重要意义。
本文探讨了批量执行数据的策略,包括固定计时器、XPath断言、集合点和事务控制器等关键概念。同时,讲解了如何利用循环控制器控制接口的循环次数,以及正则表达式在接口关联中的应用。此外,还介绍了模拟器录制接口在测试流程中的作用,对于提升自动化测试效率具有重要意义。
批量执行数据
批量执行数据2
接口关联json
固定计时器:在固定时间之后开始请求
断言XPath断言
集合点,在同时间一起请求
请求默认值:在该页面输入的数据都是默认值
事务控制器:多个接口一起组合为一个整体
循环控制器:控制包含的接口循环次数
正则表达式:关联表
模拟器录制接口
 17万+
17万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























