




 本文深入探讨了DIY无人机中常见的传感器类型及其应用,包括6轴和9轴陀螺仪的区别与安装注意事项,遥控器接收机的工作原理,以及超声波传感器在高度测量中的作用。文章还提供了传感器数据读取的具体方法。
本文深入探讨了DIY无人机中常见的传感器类型及其应用,包括6轴和9轴陀螺仪的区别与安装注意事项,遥控器接收机的工作原理,以及超声波传感器在高度测量中的作用。文章还提供了传感器数据读取的具体方法。
专业的无人机所用的传感器种类众多,作用复杂,但是我们这种DIY性质的无人机就没那么多讲究,只说几种常用的无人机传感器
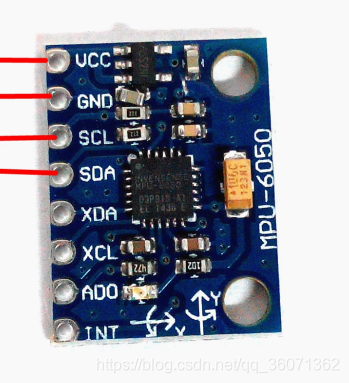
(1)6轴或9轴陀螺仪
6轴或9轴指的是其内部传感器的轴数,如6轴传感器MPU6050,内部集成了三轴的角速度计和三轴的角加速度计;9轴的mpu9250在其基础上增加了三轴的地磁计。至于其内部为什么能测出这些数据,笔者只记得当时有一位新加坡教授说他是做这个的,内部是利用电容的原理等等,,,,可以不管他,对于我们来说,只明白如何获取陀螺仪的数据就可以了,多数都是通过I2C读取出来,9250没怎么用过,但是6050知道,原始数据是6个数据,即3个角加速度,3个角速度,但是6050内部可以直接读出角度值。
陀螺仪安装时注意与四旋翼机架的相对位置,这将涉及到后面你如何使用陀螺仪的几个数据。6轴的陀螺仪精度不如9轴,尤其是Z轴方向的零漂很严重,需要很好的卡尔曼滤波来解决这个问题,但是9轴的陀螺仪应该就能很好的输出数据。
(2)遥控器接收机
遥控器接收机是遥控器配套的设备,安装在飞机上,但是遥控器拿在人的手里,遥控器发出无线信号给接收机,接收机将其转化为PWM波形输出到单片机,其中摇杆的数据载在占空比上,32要使用输入捕获进行识别占空比
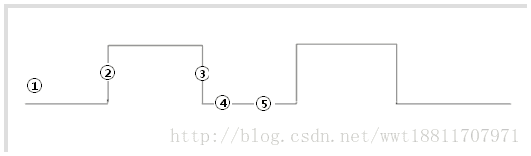
如拿这个波形来说,STM32要在2处触发中断开始计时,在3处停止计时,获取的就是高电平的时间
(3)超声波传感器
超声波传感器是很常见的一种传感器,我们拿它来测距,因为在Z轴垂直方向上,飞机要定高必须要有测距传感器来实现。当然超声波的测量范围有限,也有厂家使用气压计传感器的,我们不予以研究,以实现为目的,性能再说
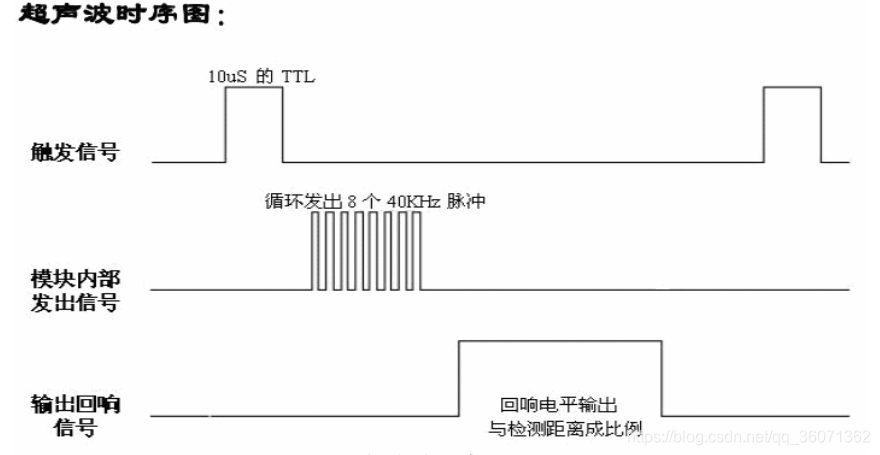
以HC-SR04为例,使能端输出一个10us的高脉冲,然后信号输入脚上升沿开始计时,下降沿停止计时,测得的就是声音来回的的飞行时间,由此计算出超声波探头到前方障碍物的距离。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









