






 本文详细介绍了Harris与Shi-Tomasi两种角点检测算法的原理及其实现过程,包括如何计算特征值和响应值,以及如何通过设置阈值筛选有效的角点位置。通过OpenCV库的函数实现自定义角点检测,并提供了完整的代码示例。
本文详细介绍了Harris与Shi-Tomasi两种角点检测算法的原理及其实现过程,包括如何计算特征值和响应值,以及如何通过设置阈值筛选有效的角点位置。通过OpenCV库的函数实现自定义角点检测,并提供了完整的代码示例。
1.基于Harris与Shi-Tomasi角点检测;
2.首先通过计算矩阵M得到λ1 λ2 两个特征值根据他们得到角点响应值;
3.然后自己设置阀值实现计算出阀值得到有效响应值的角点位置;
自定义计算Harris角点特征值:
void cv::cornerEigenValsAndVecs( InputArray src, OutputArray dst,
int blockSize, int ksize, int borderType = BORDER_DEFAULT )
自定义计算Shi-Tomasi角点特征值:
void cv::cornerMinEigenVal( InputArray src, OutputArray dst,
int blockSize, int ksize = 3, int borderType = BORDER_DEFAULT )
示例:
#include <opencv2/opencv.hpp>
#include <iostream>
#include <math.h>
using namespace std;
using namespace cv;
#define WINDOW_NAME1 "harris自定义检测"
#define WINDOW_NAME2 "tomasi自定义检测"
Mat srcImage, grayImage, harriRspImg, shiTomasiRsp;
double harris_min_rsp, harris_max_rsp;
int g_nThresh_harris = 60, g_nMaxThresh_harris = 300;
int g_nMax_count = 300;
// Shi-Tomasi
int g_nThreshTomasi = 40, g_nMaxThreshTomasi = 300;
double tomasi_min_rsp, tomasi_max_rsp;
void on_fCustomHarrsi(int, void*)
{
if (g_nThresh_harris < 10)
g_nThresh_harris = 10;
Mat resultImage = srcImage.clone();
float t = harris_min_rsp + (((double)g_nThresh_harris) / g_nMax_count) * (harris_max_rsp - harris_min_rsp);
for (size_t row = 0; row < srcImage.rows; row++)
{
for (size_t col = 0; col < srcImage.cols; col++)
{
float v = harriRspImg.at<float>(row, col);
if (v > t)
circle(resultImage, Point(col, row), 2, Scalar(0, 0, 255));
}
}
imshow(WINDOW_NAME1, resultImage);
}
void on_fCustomTomasi(int, void*)
{
if (g_nThreshTomasi < 20)
{
g_nThreshTomasi = 20;
}
Mat resultImage = srcImage.clone();
float t = tomasi_min_rsp + ((double)g_nThreshTomasi / g_nMax_count) * (tomasi_max_rsp - tomasi_min_rsp);
for (size_t row = 0; row < srcImage.rows; row++)
{
for (size_t col = 0; col < srcImage.cols; col++)
{
float v = shiTomasiRsp.at<float>(row, col);
if (v > t)
circle(resultImage, Point(col, row), 2, Scalar(0, 0, 255));
}
}
imshow(WINDOW_NAME2, resultImage);
}
int main()
{
srcImage = imread("fangzi.jpg");
cvtColor(srcImage, grayImage, COLOR_BGR2GRAY);
// 计算特征值
int blockSize = 3, ksize = 3;
Mat harris_dst = Mat::zeros(srcImage.size(), CV_32FC(6)); // 特征结果
harriRspImg = Mat::zeros(srcImage.size(), CV_32FC1); // 响应结果
double k = 0.04;
cornerEigenValsAndVecs(grayImage, harris_dst, blockSize, ksize, 4);
// 计算响应
for (size_t row = 0; row < harris_dst.rows; ++row)
{
for (size_t col = 0; col < harris_dst.cols; ++col)
{
double lambda1 = harris_dst.at<Vec6f>(row, col)[0]; // λ1
double lambda2 = harris_dst.at<Vec6f>(row, col)[1]; // λ2
// 根据公式计算响应值 R = λ1 * λ2 - k * pow( (λ1 + λ2), 2 )
harriRspImg.at<float>(row, col) = lambda1 * lambda2 - k * pow((lambda1 + lambda2), 2);
}
}
// 求出在这些响应点中求取最大值和最小值
minMaxLoc(harriRspImg, &harris_min_rsp, &harris_max_rsp);
namedWindow(WINDOW_NAME1, WINDOW_AUTOSIZE);
createTrackbar("quality value:", WINDOW_NAME1, &g_nThresh_harris, g_nMaxThresh_harris, on_fCustomHarrsi);
on_fCustomHarrsi(0, NULL);
// 计算Shi-Tomasi最小特征值
shiTomasiRsp = Mat::zeros(srcImage.size(), CV_32FC1);
cornerMinEigenVal(grayImage, shiTomasiRsp, blockSize, ksize, 4);
minMaxLoc(shiTomasiRsp, &tomasi_min_rsp, &tomasi_max_rsp);
namedWindow(WINDOW_NAME2, WINDOW_AUTOSIZE);
createTrackbar("tomasi quality value:", WINDOW_NAME2, &g_nThreshTomasi, g_nMaxThreshTomasi, on_fCustomTomasi);
on_fCustomTomasi(0, NULL);
waitKey(0);
return 0;
}
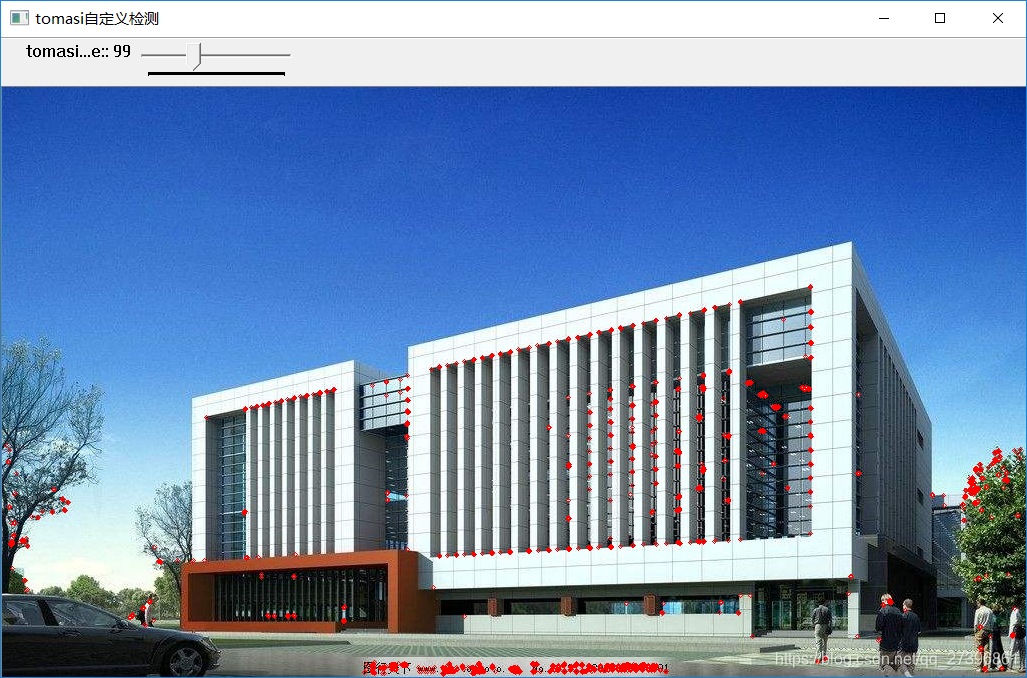
效果图:


















 1366
1366

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









