




 本文介绍了视觉伺服控制的基本方法,特别是图像基视觉伺服(IBVS)的几何解释。通过图像点的位置误差,控制策略旨在实现误差的指数衰减。在IBVS中,相机的运动包括沿光轴的前后移动和绕光轴的旋转。当目标位置改变时,相机的优化轨迹和实际运动方向随之调整,以达到目标。
本文介绍了视觉伺服控制的基本方法,特别是图像基视觉伺服(IBVS)的几何解释。通过图像点的位置误差,控制策略旨在实现误差的指数衰减。在IBVS中,相机的运动包括沿光轴的前后移动和绕光轴的旋转。当目标位置改变时,相机的优化轨迹和实际运动方向随之调整,以达到目标。
Chaumette F, Hutchinson S. Visual Servo Control, Part I: Basic Approaches[J]. IEEE Robotics & Automation Magazine, 2006, 13(4):82-90.
IBVS的几何解释
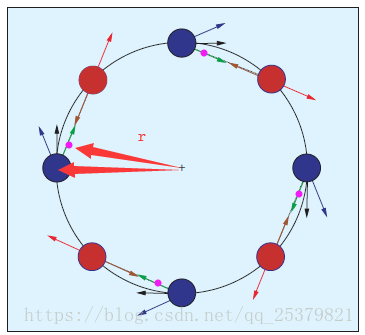
如上图所示,蓝色4个点是初始位置,红色4个点是目标位置
在控制方案中使用,这控制方案试图确保误差e的指数下降。这意味着当误差是由图像点
和
坐标组成误差时,点的优化轨迹是从初始位置到目标位置的直线,如图中绿色箭头所示。
这时候相机的运动除了绕光轴旋转以外,还有沿着光轴往回运动的分量(要运动到粉色点所在位置,由于粉色4个点所在的圆的半径比原来的要小,这要求相机沿着垂直纸面的方向(光轴)向外运动,这个半径是由大变小后再由小变大,因此相机有沿着光轴先向外运动再向内运动的分量)。
当目标位置和当前位置成绕光轴角度时,点的优化轨迹就是沿着半径的方向,这时候相机运动就没有了绕光轴旋转的成分,只有沿着光轴前进后退。
而在控制方案中使用
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









