










摘 要
反应釜在生活中应用到了很多领域,尤其是在化工行业,是用于发生化学反应的一种容器。在化学反应过程中
有大量的吸放热产生,影响反应的进行,所以我们要对反应釜的温度进行控制。本文就是利用机理建模建立出温度
的数学模型,然后基于MATLAB来对连续搅拌反应釜进行温度的数学模型仿真,并进行验证。利用MATLAB中的
Simulink模块搭建出温度的仿真图,更直观的观察到了反应釜内物料温度的一个变化,从一开始的波动很大,到后
来逐渐稳定,达到了对温度的一个控制。
关键词:反应釜 ;温度控制;数学模型;MATLAB
第一章 绪论
1.1 课题研究的背景与意义
1.1.1 课题研究背景
本课题研究的主体是连续搅拌反应釜,在生活中我们有很多的地方可以用到反应釜,反应釜是一种化学反应容
器,可以用来进行化学反应。所以在化学工业等方面应用广泛,为化学工业的发展带来了极大的便利。因为在化工
生产过程中进行很多的化学反应,可能会产生很多的温度高、压力大、有腐蚀性、有剧毒和对身体有害的物质,会
威胁人们的身体健康。但是化学反应釜的出现为人们带来了便利,因为化学反应釜是一种化学反应容器,可以用来
快速进行反应物热量的交换,节约时间,其中产生的产品质量稳定。在我们生活中不光是化工行业,在制药行业、
染料行业也应用十分广泛,为我们的生产和生活带来了很多的便利。
在连续搅拌反应釜系统中,为了得到更好的产品和更多的产量,我们要选择合适的控制变量,控制变量的选择
一定要好控制,避免有太多的干扰。所以我们可以挑选温度或者物料浓度来作为控制变量,以便于达到我们想要的
目的。但在我们具体的操作中浓度不是很好的控制,也不是很方便的可以检测出来,所以我们通常会使用比较好控
制的温度作为被控变量。反应釜内的温度有升温过程、恒温过程、降温过程,其中最重要的就是恒温阶段。所以对
于如何保证反应釜内的温度在一定时间内迅速达到恒定,并使得到的产品产量最多就是控制的核心所在。
在实际化学生产过程中,新产生的控制技术和控制方案不能够没有经过实验直接应用到生产的实际装置中,如
果这样做的话就很有可能因为技术的不成熟或者操作的失误造成工作人员的受伤,对于生产生活造成一定的困扰,
为工厂的效益也带来了严重的损失。为了避免这些情况的产生,所以在投入实际生产之前一定要做好仿真验证。
1.1.2 课题研究的意义
本课题以连续搅拌化学反应釜作为被控制的对象,并以仿真为基础。在很多化学生产过程中会遇到很多危险的
事情,我们就可以通过数字仿真的方式进行仿真验证。通过这样的方法,可以降低实验的成本,提高实验过程的安
全性,为工作人员提供了保障,还可以提高整个系统的操作性。
本课题采用MATLAB来进行连续反应釜的仿真,因为MATLAB仿真编程可以混合C语言等高级语言来一起编程,还可
以结合很多的软件平台来一起进行建模仿真。MATLAB中有很多的模块,其中的Simulink模块可以绘制仿真的模型
图,更够很好的直接观察到每一部分是怎样搭建起来的,直观性较强,操作起来也很方便。Simulink底层还拥有成
熟的模型算法便于进行动态过程的求解,避免了用复杂的数值计算方法求取系统动态特性的弊端,更便于不同控制
方案在系统中的应用实验[2]。通过这样的仿真软件系统可以节约很多的时间,还可以节约很多的人力物力财力,降
低生产的成本,减少了实际操控实物的风险。是十分值得工厂车间来进行学习的,同时我们还可以研究出更为简便
的方法,来为工厂提供应用。
1.2 国内外对连续搅拌反应釜控制技术的研究现状
化学反应釜自从被发明以来,一直都发展迅猛,每年的发展速度都在递增。我们现阶段就正处于快速发展中,
在这个过程中需要消耗很多的成本。我国现阶段反应釜控制的发展成果和国外其他国家相比有很多的不同之处,需
要我们反应釜发展技术的进一步提高。在控制技术方面,我国和国外其他国家的研究现状如下:
国内外在反应釜系统控制方面都提出了基于神经元网络的自适应控制算法,解决了反应釜温度的时滞性问题,
对今后反应釜温度控制来说,可以达到更好控制的效果。
国外曾经有学者提出使用双模控制,基本的过程是:在反应釜开始的时候,首先进行加热处理一直到反应釜的
温度达到与预先设定的值,再进行冷却持续一段时间 后。再将包装物夹套中内部的温度设定在某个可以适宜的温
度数值,持续 分钟。最后,使用串级 PID 控制器的工作原理,它可以实现对夹套内部温度的控制,这就是所谓的
双模控制。还提出将反应热作为一种扰动,使用合适的方法将扰动的值估算出来,使用前馈控制将其抵消扰动的干
扰;剩下的部分我们近似的看作是线性的系统,就可以采用PID 控制。还有人采用GMC 方法来控制反应釜的温度,
这种控制方法的鲁棒性要比双模控制的强,并且得到的仿真结果也较为准确。
国内还有学者提出了一种新型的PID 算法,此算法结合了遗传算法的优点,改善了传统的PID 对连续反应釜的
控制效果,还在PID 算法基础上结合模糊算法与神经网络结构提出了一种复合起来的策略,取得了很好的控制效果
。
1.3 反应釜发展趋势
我们要明白要想使反应釜产业快速发展的关键之处主要集中在技术发展的水平、产品品质、产品价格与产品的
售后服务等方面。随着各行各业的发展,各行所产生的产品产量也在不断的增加,所以对于反应釜的要求也越来越
高。下边叙述一下反应釜逐渐呈现的发展趋势:
(1)为了满足生产产量的需要,反应釜的容积一直往更大的方向发展。大容积可以带来更多的产量,可以取得
更多的收益,使得利益最大化。在这方面国外的容积是我国的3-4倍。
(2)反应釜的速度呈现出更快的趋势,我国从单一的搅拌器发展到了双搅拌器;但国外的反应釜筒体还可以旋
转,反应的速度提高了很多。
(3)自动化生产是大势所趋,代替了传统的手工业操作,解放了生产力。通过采用自动化程序控制,既可以保
证精确度,提高产品的品质,降低成本,又可以消除对环境的影响。
(4)实现能源的充分利用,在反应釜工作的时候会产生很多的能量,我们要充分利用好这些能源。这也将是今
后反应釜发展趋势。
(5)节能环保方面也是未来反应釜发展的趋势,因为国家越来越注重环境方面的保护,要做到绿色环保无污
染,在反应釜的制作过程中也更加注重材料的环保性,是全世界反应釜发展都应该追求的一个方面。
1.4 本文主要研究内容
本课题是主要是通过了解反应釜的工作原理,来具体分析反应釜的温度变化。并对根据反应釜反应的质量守恒
和热量守恒,采用机理建模的方法进行建立反应釜的温度的数学模型。建立完数学模型后通过MATLAB软件中的
Simulink模块搭建模型进行仿真验证。
本文的研究内容从基本上大概分为五章,每章节的主要内容如下:
第一章 开篇首先简要介绍了连续搅拌反应釜的研究背景及意义、连续搅拌反应釜控制技术的国内外研究现状和
一些反应釜发展的趋势以及本文的主要研究内容。
第二章 分析了连续搅拌反应釜的基本结构,主要是由什么组成,还有就是各个组成部分的作用。还分析了连续
搅拌反应釜的工作原理,对反应釜的整个工作过程做了简要地叙述。还分析连续搅拌反应釜的控制方案,选择了温
度作为被控变量。反应釜的夹套工作时与反应室反应的物料进行传热,然后根据系统的热量守恒,我们选用了机理
建模的方法建立了温度的数学模型。
第三章 本章利用第二章得到的反应釜温度的数学模型,通过MATLAB仿真软件中的Simulink模块搭建系统模型,
得到波形图,进行了仿真验证。
第四章 硬件部分的验证,采用TD-ACC自动控制原理的模拟实验平台进行二阶模型的电路连接,并通过其虚拟仪
器进行波形的输出,与MATLAB仿真得到的波形进行比较。
第五章 简要的总结了本论文进行的主要内容研究,得出了结论。并对下一步要做的工作进行了展望。
第二章 连续搅拌反应釜建模研究
2.1 连续搅拌反应釜的基本结构和工作原理
2.1.1 基本结构
连续搅拌化学反应釜的基本结构如图21所示
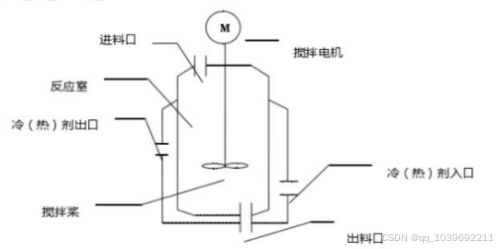
图21连续搅拌反应釜基本结构图
从构成的基本结构上来讲,所用的搅拌容器和用来搅拌的搅拌电机是连续搅拌化学反应釜的两个总的部分。搅
拌的容器包括反应室、夹套以及其他的内部组成构件。搅拌机是由搅拌器、搅拌轴以及其密闭装置组成的。反应室
是一个钢制的圆柱体容器,可以在容器的进料口装入进口的物料,使物料在反应室内部进行化学反应,反应完毕后
的物料会从反应室底部的出料口得到。
为了维持反应釜内的反应温度,需要在反应室外部设置一个夹套。夹套包围在反应室的外部周围,要通过焊接
或者法兰连接的方式形成密闭空间的钢结构。在夹套里的冷(热)剂出口处通入可以用来加热或冷却的温度介质,
通过夹套内壁向反应室进行热量传递,来进行反应室内的物料的加热或冷却,可以通过夹套上的调节阀来控制温度
介质即冷(热)剂的流量大小。在夹套的侧边通有冷(热)剂的出口和入口。
密闭装置是反应釜很重要的一部分,在化学反应中有很多浓度很高的反应物,有可能溅出来,对实验人员造成
一定的危害,再加上在反应的过程有可能产生一些易腐蚀、有剧毒、对环境有污染的物料还可能产生容易爆炸和容
易燃烧的气体。所以装置的密封性一定要好,紧密不透气。
搅拌轴是搅拌机的一部分,是用来搅拌加速反应的进行仪器,为整个系统的反应提供了一定的动力的支持。
温度计是用来检测反应过程中温度变化的,我们为了更好地观察反应室内的温度,我们可以在反应室内部装上
一个温度计套管。温度计套管的材料和反应室用材料是相同的也是钢制的,我们可以把温度计和温度传感器放入套
管中。为了更好地满足实际生产的需要,还可以在反应室的外部接上一些附件装置。
2.1.2工作原理
首先将需要反应的反应物按照所需比例混合,通过反应釜的进料口进入到反应室内,并加入所能用到的催化
剂。然后向反应釜的夹套入口处通入可以用来冷却的温度介质用以降低反应室内物料的温度或者通入用来加热的温
度介质用以提高反应室的物料温度。再然后通过搅拌器来搅拌进入的物料使物料尽可能均匀反应,并提高反应的速
率,使物料的温度均匀起来。当反应室内的温度达到预先设定的温度的时候,这时候要保持一定时间的恒定温度来
使反应正常进行,等待一段时间使反应结束,还要进行冷却。最后反应产生的物料可以从反应室底部的出料口放出
来,我们就得到了我们想要的产品,整个过程操作起来也是十分的方便,这就是连续搅拌反应釜的工作原理。
所以在上述工作原理的叙述中,恒温条件显得十分重要,如果反应的温度过高或者过低,都会对反应的进行产
生影响,导致产生结果或得到的物料发生变化。大多数时候反应的温度越高反应进行的速率就越快。所以温度和反
应速率呈现一种正比例的关系,温度越高反应速率越快,速率越快也就会导致温度进一步升高。温度过高就会对要
得到产品产生影响,也会影响生产的安全性,造成一定的危害。为了使反应釜内的反应温度稳定下来,在夹套中要
通以一定的用来冷却的温度介质,来吸收转移走反应室中放出不必要的热量。我们可以通过调节流入到反应釜夹套
中用来冷却的温度介质的流量,从而来控制反应釜内物料的温度使其符合生产的要求。
2.2连续反应釜的建模
2.2.1建模方法
(1)机理建模
图22 机理建模示意图
机理建模,又被称作“白箱”建模,如图22所示,机理建模首先是通过系统的一些物理定律,或者化学反应的
各种机理建立出符合要求的数学模型。通过机理建模我们可以清楚的直观的看出整个系统是怎样的结构。之所以叫
“白箱”建模也是因为如此,直观性较强,可以直接了解系统的内在联系。
机理建模只是建立的数学模型,大多是理想状态下的。但有时候建立数学模型会比较困难不容易实现,在这样
的情况下,机理建模就不太适用了。我们就要寻求更加合适的建模方法,经验建模就可以很好地解决这一困难。
(2)经验建模
经验建模,又被称作“黑箱”建模,如图23所示。经验建模一般是通过输入和输出的数据进行数学处理建立的
模型。经验建模是对内部的反应机理并不是很了解的时候,通过数据来进行回归拟合,得到一个近似的函数关系。
由此可见经验建模可以避免那些复杂的机理,只从得到的数据方案分析即可。大大的减少了工作量,得到的模型也
会更加的简化,在很多方面使用起来要比机理建模更加的简便。
除上述两种建模方法外还有一种灰箱的建模方法,此建模方法是基于上述两种建模结合起来的建模方法,具有
两种建模的有优点,使用起来更加的灵活,更能适用于大多数系统的建模。所以我们在建模的时候一定要明白自己
的目的,想要达到一个怎样的结果,要考虑模型的具体实施过程,选择最合适的建模方法。
2.2.2建模过程分析
连续搅拌反应釜是典型的化学反应器,具有非线性特性,在石油化工、生物制药、食品等生产领域有广泛的应
用,也是研究各种控制方案 的典型工艺对象。
在此次设计中,由于我们的实验条件有限,没有办法去进行实际系统的深入研究所以只能采取数值仿真的方
式,得到我们的设计目的。在连续搅拌反应釜中会通过其内部进行的反应得到的其反应机理,明白反应是怎样进行
的,再根据物料守恒和热量守恒等,采用数学方法建立出可以代表反应釜内反应变化的数学模型。 此次建模是基于
机理建模进行的。常用的数学模型有差分方程、微分方程、代数方程等。在建模过程中有很多变量的干扰,所以为
了我们更方便的解决问题,需要做出以下假设:
(1)反应发生前后,反应室内的物料总的体积不变;
(2)反应室内的物料混合的完全的;
(3)在进行反应的过程中的参数不发生变化。
在上述假设的基础之上,通过各类守恒原理,建立数学模型。设连续搅拌反应釜的规格为100L, A为反应釜截
面积, h为反应釜内液位高度。
用连续搅拌反应釜实现物料A和物料B的混合(以氨水和硝酸为例,
)。
A和B从进料口进入进行反应,A的流量为 ,温度为 ,比热容为 ,密度为 ,A容器的底面积为 ;B的流量为
,温度为 ,比热容为 ,密度为 ,B容器的底面积为 。物料A与物料B反应产生物料C,物料C的密度为 ,
流量为 ,比热容为 。
根据反应釜系统的总物料能量平衡,可得到反应釜内液位变化的微分方程式(21):
(21)
为入口两物料总的体积流量, 为出口物料的体积流量。
根据能量守恒的关系,反应釜内的热量平衡满足以下规律:
进料A和进料B反应产生的物料C单位时间内热量的变化率应等于进料A和进料B单位时间内带入的热量,减去反应
产生的物料C流出液体带走的热量得到下列等式(22):
(22)
当系统处于稳态时,有
,
,由于
,
则有
进行拉氏变换得到式(23)
(2-3)
T与q1的传递函数式(24):
(24)
同理可得:
T与q2的传递函数式(25):
(25)
式中,参数的物理意义及取值见表 31。
表 31连续搅拌反应釜模型中各参数的物理意义及取值
参数
物理意义
取值
物料A的进口流量
物料B的进口流量
进料A的温度
进料B的温度
进料A的比热容
进料B的比热容
出口物料的比热容
进料A的密度
进料B的密度
出口物料的密度
进料A的液阻值
进料B的液阻值
50
2.04
A
h
反应釜截面积
0.28
反应釜内液位高度
0.16m
第三章 基于MATLAB的仿真建模研究
3.1 连续搅拌反应釜的控制方案设计
我们在连续搅拌反应釜的控制方案设计过程中首先要考虑以下几点:
(1)控制的物理量。首先我们要选择我们需要控制的物理量,根据反应釜进行的不同反应,可以选择反应的转
化率、温度、压力、流量、液位、产品的产量、粘度等量进行控制。 (2)物料平衡和能量平衡 在反应釜系统的工作
过程中要保持物料平衡和能量平衡,才能够使反应釜的反应过程正常进行。在物料守恒中,为了保持物料的平衡,
需要定时地排出反应中的不参与反应得物料,来保持反应的正常进行。在能量守恒中,为了使能量保持平衡,我们
要及时的吸收掉反应产生的不必要的热量,防止热量的积累,以至使我们的产品发生变化。
(3)约束条件 在化工生产过程中我们首先要保证生产的安全性,所以在反应釜的控制中要有一定的约束条件。
比如在有些氧化反应中,我们需要调控反应物的浓度和加入的比例,如果比例和浓度不当,严重的话就会导致其发
生爆炸。所以要约束反应物的浓度和比例。
在反应釜的控制方案中控制的物理量量是十分关键的一个地方。会直接影响反应釜的工作运行,所以我们要挑
选好测量和控制的量来作为控制变量。在反应过程中温度是一个关键的控制指标,测量起来也较为方便,所以本文
以温度作为被控对象。
在控制方案的设计时我们可以用,反应的物料流量自动控制:首先我们要将用到的反应物料进行混合,并且要
按照一定的比例。来确保进入到反应室的流量稳定。从而可以减少进口物料流速过快或者过慢造成反应室物料吸收
和放出的热量变化,从而导致温度发生一定的变化。因此我们实现反应物料流量的自动控制,可以确保以更好地流
速进入反应室,来避免反应室温度发生变化的这种情况的发生。然后与夹套中的温度介质进行热量传递,此时我们
也要控制好温度介质的流入量,可以通过调节阀进行调节。我们准备好这些,便可以更好的控制反应的进行避免一
些干扰的发生。上述就是本文的连续反应釜的控制方案设计。
3.2 利用Simulink模块搭建连续反应釜的仿真模型
在第二章中我们建立了反应釜温度的数学模型,我们通过得到的数学模型要进行仿真验证,首先我们对第二章
的传递函数进行数值代入,整理出二阶传递函数的模型,然后使用Simulink进行模型的搭建,最后运行程序得到波
形图。
搭建模型的具体步骤如下:
打开软件MATLAB,启动 Simulink。在Simulink中找到“Commonly Used Blocks”模块库我们要选择“Gain”、
“Mux”模块,双击模块可以拖入新建的空白页中,在 “Continuous”模块库中选择“Transfer Fcn”模块,在
“Signal Routing”模块库中选定“Manual Switch”模块,在“Sinks”模块库中选择“Out1”、“Scope”模块,
在“Sources”模块库中选择“Step”、“Pulse Generator”、“Sine Wave”等模块。选择好模块之后,我们用线
将他们按要求连接好即可[6]。
通过带入数值计算得到,当传递函数为
时,搭建如图31所示的 Simulink 仿真模型。
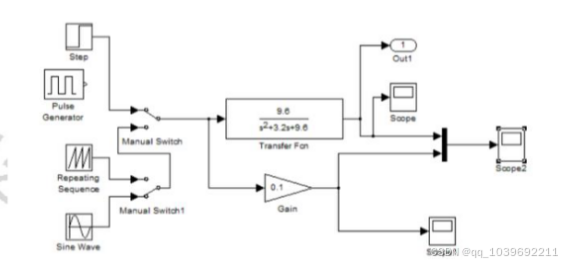
图31 系统模型图
当给定输入为阶跃信号时得到的波形图如图32所示,红色的线是阶跃信号,黄色的线是二阶传递函数的波形。
在开始的时候给系统一个单位阶跃的信号,可以得到阶跃响应的曲线。
从图4-3中可以看出在仿真输入的开始阶段图形有较大的波动,是因为冷却剂刚与反应室内的物料起作用,夹套
中的冷却剂与反应室内进行传热。系统的输出即物料的输出温度受到冷却剂的控制,所以在反应进行了一段时间
后,曲线达到平衡。即输出的温度达到了稳定。
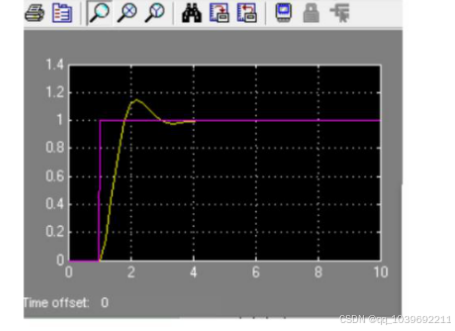
图32 CSTR的阶跃响应曲线
3.3 基于M文件建立仿真模型
我们还可以直接用MATLAB软件建立一个M文件,来进行对
的仿真验证,程序编辑如下所示:
clc
clear
num=[0,9.6];
den=[1 3.2 9.6];
sys_tf=tf(num,den)
[z,p,k]=tf2zp(num,den)
sys_zpk=zpk(z,p,k)
[A,B,C,D]=zp2ss(z,p,k);
sys_ss=ss(A,B,C,D)
step(sys_tf);
grid on;
仿真结果如图33所示
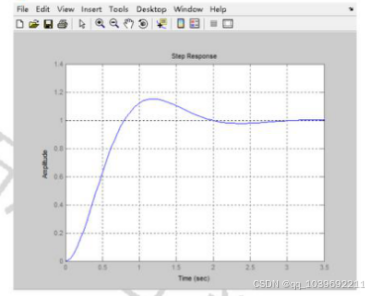
图33 仿真波形
3.4 使用S-function构造仿真模型
设传递函数为
,建立一个M文件得到状态空间表达式
M文件:den=[9.6]
num=[1 3.2 9.6]
[A,B,C,D]=tf2ss(den,num)
运行结果如图34所示:

图34 运行结果
由此可以得到,状态空间表达式(31):
(31)
图35 系统模型图
在simulink中建立S-function函数,并建立如图35所示的系统模型
在M文件中对模板文件sfuntmpl.m文件进行修改,
其中状态方程程序:
function sys=mdlDerivatives(t,x,u)
sys = [-3.2 -9.6;1 0]*x+[1;0]u;
输出程序方程:
function sys=mdlOutputs(t,x,u)
sys = 9.6x(2);
完整程序部分见附录。
附录A
function [sys,x0,str,ts,simStateCompliance] = ep5_2(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes;
case 1,
sys=mdlDerivatives(t,x,u);
case 2,
sys=mdlUpdate(t,x,u);
case 3,
sys=mdlOutputs(t,x,u);
case 4,
sys=mdlGetTimeOfNextVarHit(t,x,u);
case 9,
sys=mdlTerminate(t,x,u);
otherwise
DAStudio.error(['Simulink:blocks:unhandled Flag',num2str(flag)]);
end
function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 2;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 1;
sizes.NumInputs = 1;
sizes.DirFeedthrough = 0;
sizes.NumSampleTimes = 1; % at least one sample time is needed
sys = simsizes(sizes);
x0 = [0;0];
str = [];
ts = [0 0];
function sys=mdlDerivatives(t,x,u)
sys = [-3.2 -9.6;1 0]*x+[1;0]*u;
function sys=mdlUpdate(t,x,u)
sys = [];
function sys=mdlOutputs(t,x,u)
sys = 9.6*x(2);
function sys=mdlGetTimeOfNextVarHit(t,x,u)
sampleTime = 1; % Example, set the next hit to be one second later.
sys = t + sampleTime;
function sys=mdlTerminate(t,x,u)
sys = [];
第四章 硬件设计
4.1 二阶系统模拟电路
二级系统的典型结构如图41所示
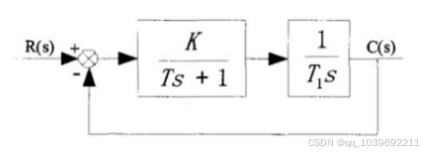
图41 二阶系统动态结构图
闭环传递函数为:
由第二章建立的有关温度二阶传递函数模型,可以由Multisim软件建立二级系统的模拟电路图,
模拟电路图
、 、 、 构成惯性环节, 、 、 构成积分环节,经推导得到系统的传递函数为式(41):
(41)
得
,
以
为例,经计算得到
,
,
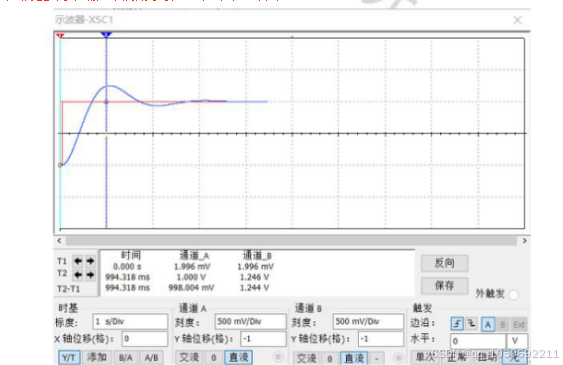
时域分析中常用的输入信号有阶跃信号、脉冲信号、斜坡信号、加速度信号等,在本中我选用了阶跃信号
为输入信号。
本次我们的输入采用直流电源1V,用开关S1来模拟单位阶跃输入信号,通过运行之后闭合开关来实现阶跃信号
的触发,输出采用示波器观察输出波形变化。如图43所示。
图43 输出波形变化
第五章 结论与展望
5.1 总结
连续搅拌反应釜是很常用的化学反应容器,主要适用于进行化学反应得到我们想要的物料产品。本文是通过分
析连续搅拌反应釜的工作原理,对连续搅拌反应釜的温度变化进行分析,建立反应釜温度的数学模型。在MATLAB软
件中利用Simulink模块搭建起模型图,并进行运行得到温度模型的波形图,通过分析波形图明白了温度是如何变化
的。最后硬件部分采用实验箱来实现。
本论文方案总结起来有以下几点:
(1)通过采用机理建模建立反应釜温度的数学模型,带入数值,得到线性的二阶模型传递函数表达式。
(2)利用MATLAB软件的Simulink模块中搭建上述得到的二阶传递函数模型,进行运行模型,并使用示波器查
看,观察波形,得到了温度变化的规律。
(3)利用得到的二阶传递函数模型,进行硬件连接,并验证模型的硬件仿真结果是否与MATLAB仿真结果一致。
5.2 展望
由于时间有限和本人能力经验不足等原因,本文还有很多问题需要进一步研究和改进。
(1)本课题实际中的化工生产过程是很复杂的化学反应系统,而本文研究的系统模型则是假设系统中的反应为
一个简单的反应过程。本论文需要进一步研究连续搅拌反应釜内存在复杂化学反应时,如何精确建立连续搅拌反应
釜温度的数学模型。
(2)进一步研究温度变化的特点时,以便可以用简单的方法来求得传递函数。
(3)本文针对连续搅拌反应釜系统只是设计了温度的数学模型,下一步可以进行对更多控制变量进行研究。
(4)研究如何把几种控制方法综合使用,以期获得更好的控制性能。
(5)如何将理论研究与实际生产相结合,更好的实现系统的要求还需要进一步的研究。

















 264
264

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









