




 本文介绍了IoU-Net,针对目标检测中的定位问题提出了解决方案。传统的检测方法依赖分类置信度选择边界框,但IoU-Net通过IoU引导的NMS和优化的边界框细化,强调了回归的重要性,减少了定位误差。IoU-Net利用反向梯度优化边界框,提高检测准确性。
本文介绍了IoU-Net,针对目标检测中的定位问题提出了解决方案。传统的检测方法依赖分类置信度选择边界框,但IoU-Net通过IoU引导的NMS和优化的边界框细化,强调了回归的重要性,减少了定位误差。IoU-Net利用反向梯度优化边界框,提高检测准确性。
最近在读的一篇tracking的文章用到了这个网络,所以了解一下。
论文连接:IoU-Net
Motivation:
1. 目标检测分为分类和回归两个任务,目前的范式是:先用分类在多个候选框中挑出置信分数最高的,然后对其进行回归得到最终的目标框。然而,在这一流程中,分类网络对最后框的挑选占据了主导作用,回归的重要性在一定程度上被忽视了。这么做的一个缺陷在于,当分类的置信度与定位(回归)的准确度不匹配时,会导致定位更准确的边界框在 NMS 过程中反被更不准确的边界框抑制。比如下图:
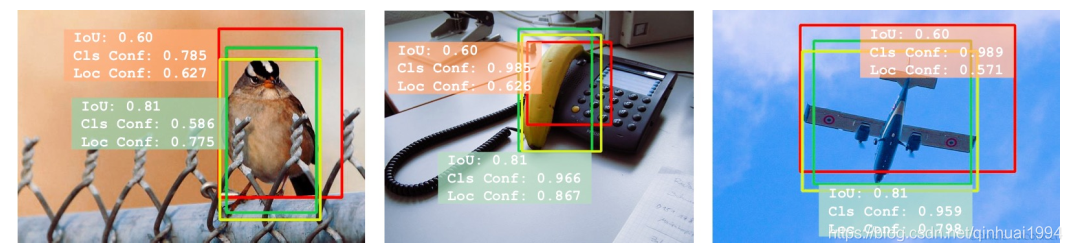 回归得更精确的框(绿框),因为在分类置信度上略低于红框,在NMS得过程中会被抑制掉,产生一种“劣币驱逐良币”的现象。
回归得更精确的框(绿框),因为在分类置信度上略低于红框,在NMS得过程中会被抑制掉,产生一种“劣币驱逐良币”的现象。
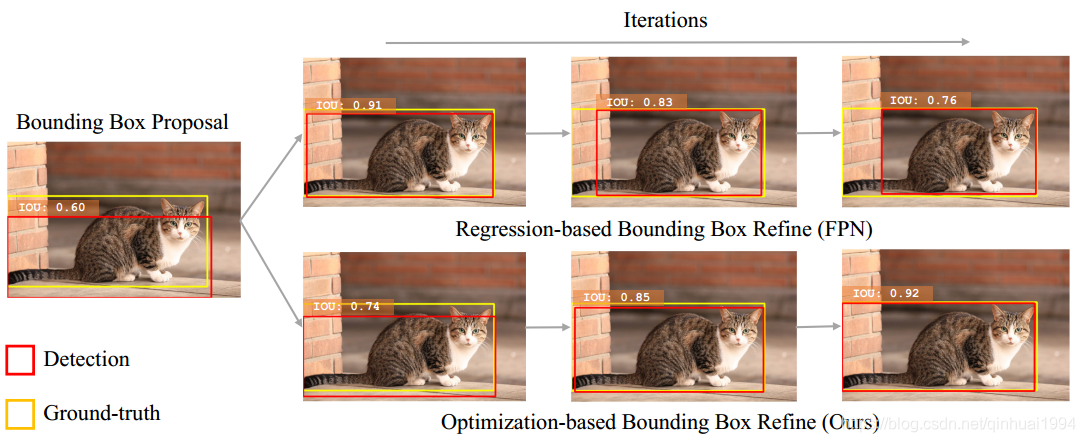
2. 缺乏定位置信度使得被广泛使用的边界框回归方法缺少可解释性或可预测性。比如,常用的迭代式边界框回归方法,随着迭代轮次的增加,在定位精度上不一定是单调增加的。所以,如果粗暴的多次应用边界框回归,可能会降低回归精度。
Contributions:
1. 针对第一个问题,作者提出了一种IoU引导
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









