 如何重新索引聚焦搜索
如何重新索引聚焦搜索








 这篇博客指导用户在Mac上重新为磁盘或文件夹创建聚焦搜索索引。首先,从苹果菜单选择“系统偏好设置”,然后进入“聚焦”设置。接着,在“隐私”标签下,将需要重新索引的磁盘或文件夹添加到列表,之后再移除,以触发聚焦重新创建索引的过程。此操作可能需要一些时间,具体取决于索引内容的大小。
这篇博客指导用户在Mac上重新为磁盘或文件夹创建聚焦搜索索引。首先,从苹果菜单选择“系统偏好设置”,然后进入“聚焦”设置。接着,在“隐私”标签下,将需要重新索引的磁盘或文件夹添加到列表,之后再移除,以触发聚焦重新创建索引的过程。此操作可能需要一些时间,具体取决于索引内容的大小。
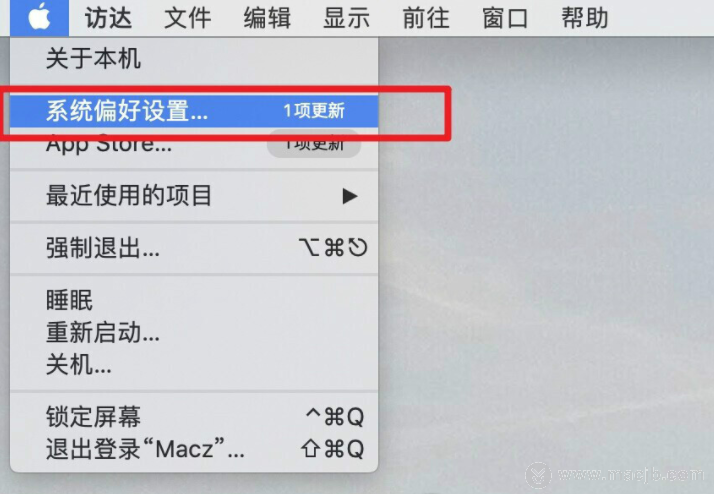
1.选取苹果菜单>“系统偏好设置”,然后点按“聚焦”。

2.点按“隐 私”标签。
3.将您想要再次为其创建索引的磁盘或文件夹拖移到“聚焦”无法搜索的位置列表内。或者点按“添加”按钮 (+),然后选择要添加的磁盘或文件夹。

仅当您拥有项目的所有权时,才能将相应项目添加到“隐 私”标签页。要了解有关权限的信息,请从“访达”菜单栏中选取“帮助”,然后搜索“权限”。
4.从同一位置列表中,选择您刚添加的磁盘或文件夹。然后点按“移除”按钮 (–),将它从列表中移除。

5.退出“系统偏好设置”。“聚焦”将为这个磁盘或文件夹中的内容重新创建索引。这可能需要一些时间,具体取决于要为其创建索引的信息量。

















 2521
2521

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









