




 本文介绍了pytest源码剖析中的pluggy模块,包括详细的hook规则和两种分析工具Callmonitoring与Calltracing,用于监测和追踪hook调用。通过理解这些工具,作者对剖析pytest底层有更强信心,将揭示hook间的调用关系。
本文介绍了pytest源码剖析中的pluggy模块,包括详细的hook规则和两种分析工具Callmonitoring与Calltracing,用于监测和追踪hook调用。通过理解这些工具,作者对剖析pytest底层有更强信心,将揭示hook间的调用关系。
本文系《pytest源码剖析》系列内容
正在连载,欢迎关注

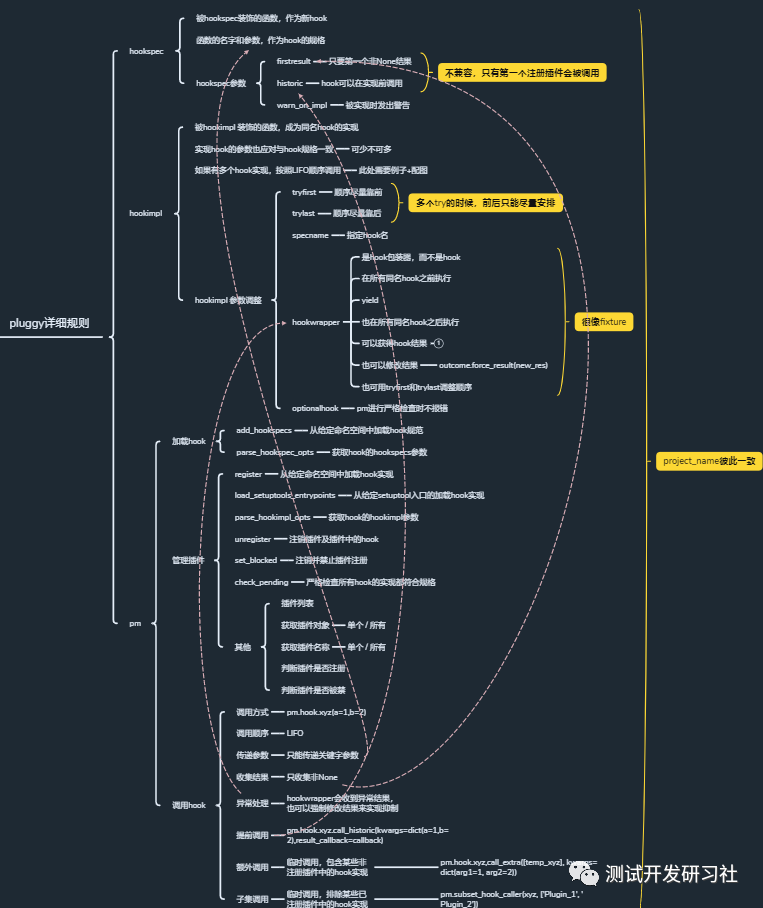
4. pluggy 详细规则
这部分细节较多,写出来的话篇幅比较大且比较枯燥,我先用思维导图梳理一下
在本系列的后续更新中,会涉及如何开发 pytest 插件,那时再详细介绍这些规则
5. pluggy 分析工具
pluggy 提供了两个 hook 分析工具,可以用来分析插件系统的运行情况
第一个工具是 hook 调用监控(Call monitoring)
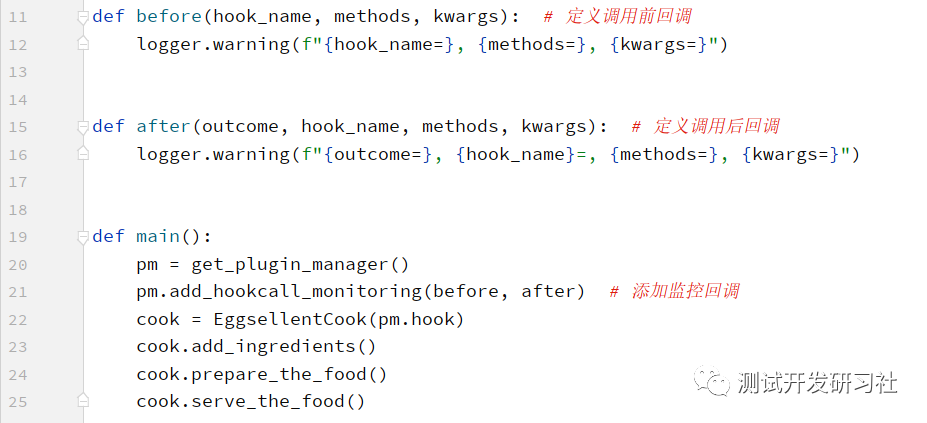
Call monitoring 定义回调
通过对 hook 设置回调函数,可以得到 hook 调用的时间、参数、要执行的函数列表,以及结果列表
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 342
342

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









