 图像处理:均值与中值滤波在MATLAB和OpenCV中的应用,
图像处理:均值与中值滤波在MATLAB和OpenCV中的应用,




对下图进行滤波处理(均值滤波、中值滤波)
1.基本思想
(1)均值滤波:任意一点的像素值,是周围n*n个像素值的均值
①选择适当的卷积核n*n,比如3*3,5*5,7*7,与原图像卷积;
②得到的结果除以n*n,代替中间的像素的灰度值;
③滑动卷积核,重复第②步,直到遍历图像结束。
(2)中值滤波:任意一点的像素值,是周围n*n个像素值的中间值
①选择适当的卷积核n*n,比如3*3,5*5,7*7
②按灰度值升或降序排列,取位于中间的灰度值来代替中间点的灰度值
③滑动卷积核,重复第②步,直到遍历图像结束。
2.代码实现(matlab)
(1)均值滤波
img = imread('face.png');
n = 7; %卷积核尺寸
kernel = 1 / (n * n) .* ones(n, n); %n*n的核
[h, w] = size(img); %图片尺寸
x1 = double(img);
x = x1;
%均值滤波
for i = 1:h-n+1
for j = 1:w-n+1
ave = sum( sum( x(i:i+n-1,j:j+n-1) .* kernel)); %卷积核与图像卷积
x(i+(n-1)/2,j+(n-1)/2) = ave;
end
end
g = uint8(x);
subplot(1 ,2, 1);
imshow(img)
subplot(1 ,2, 2);
imshow(g);
(2)中值滤波
img = imread('face.png');
n = 7; %卷积核尺寸
[h, w] = size(img); %图片尺寸
x1 = double(img); %转double为了矩阵运算
x = x1;
%中值滤波
for i = 1:h-n+1
for j = 1:w-n+1
c = x1(i:i+n-1,j:j+n-1);
a = [ ];
for k = 1:n
a = [a, c(k, :)];%把矩阵转变成一个一维向量
end
tmp = median(a);
x(i+(n-1)/2,j+(n-1)/2) = tmp;
end
end
g = uint8(x); %取整,转int8
subplot(1 ,2, 1);
title('原图像')
imshow(img)
subplot(1 ,2, 2);
imshow(g);
3.运行结果
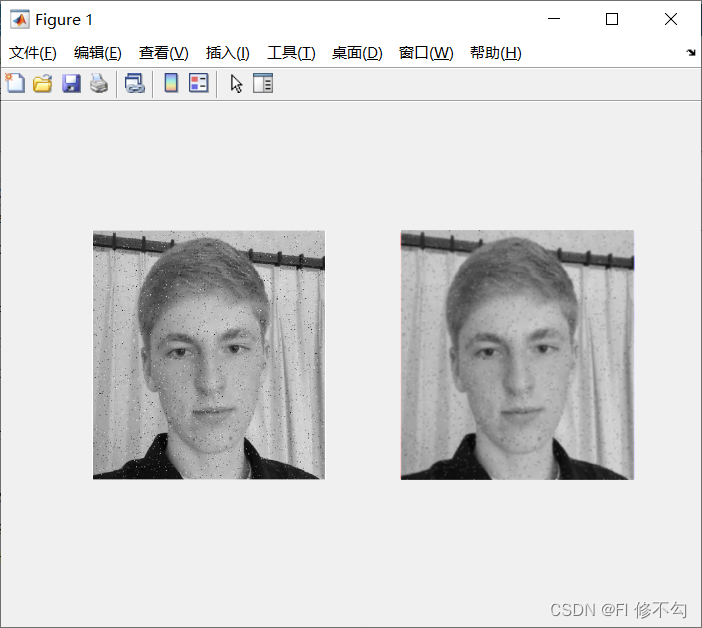
均值滤波对比
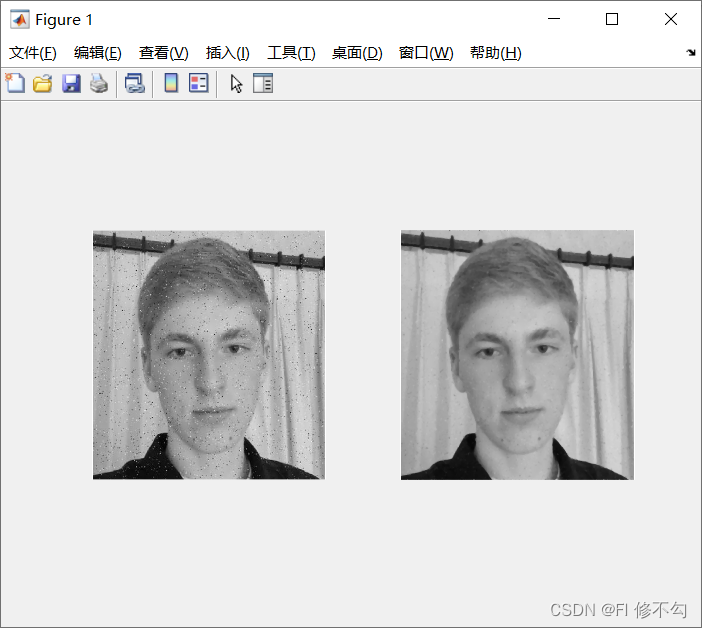
中值滤波对比
调用OpenCv中的blur和medianBlur函数实现滤波功能
import cv2
img = cv2.imread(r"C:/Users/pc/Desktop/face.png",0)
cv2.imshow('img',img)
#均值滤波
new_img1 = cv2.blur(img,(7,7))
cv2.imshow('new_img1',new_img1)
#中值滤波
new_img2 = cv2.medianBlur(img,7)
cv2.imshow('new_img2',new_img2)
原灰度图
结果如下

中值滤波

均值滤波
4.思考和总结
滤波使图像变得平滑,噪声得以去除,均值滤波使图像变得更加模糊,中值滤波是非线性滤波,能更好的处理椒盐噪声,此外,适当地选取卷积核的大小可以有效地改善滤波的效果。

















 17万+
17万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









