







 本文详细介绍了如何使用Grunt工具实现前端代码的自动化构建过程,包括安装配置、代码合并、压缩及错误检查等核心功能。
本文详细介绍了如何使用Grunt工具实现前端代码的自动化构建过程,包括安装配置、代码合并、压缩及错误检查等核心功能。
现在会进行代码的合并和压缩已成为前端人员的必备知识,那么现在来介绍一个grunt的工具。grunt是个风靡世界的工具,它的首页是 http://www.gruntjs.net
这是个中文网站,有文档可以参考。
好了,废话不多说,直接发安装步骤和注意事项。
首先,要安装nodejs,grunt是依赖node滴。上 www.nodejs.org上下载适合你电脑的nodejs版本。
当安装好node.js以后,在命令行中输入
|
1
|
node -v |

把 npm也安装上,npm为一个NodeJS的模块管理
同样,在命令行中输入 ,如果出现版本号,就说明安装成功了。
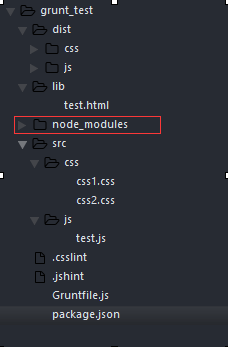
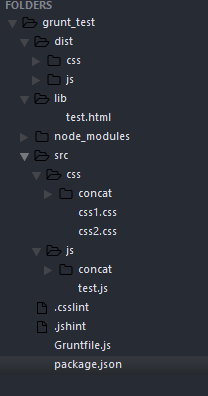
ok,nodejs已经安装好了,在下载安装grunt之前,我们需要建立一个文件目录树,像下面的结构,目的是为了更好的层次关系和更便利的操作
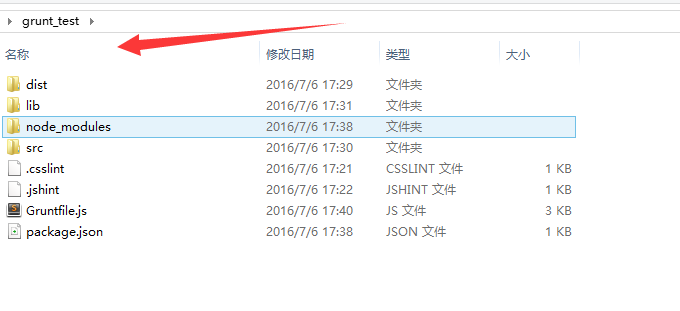
Gruntfile.js是我们自己定义的,这个文件用来配置grunt
package.json这个文件是记录下载哪些插件,并配置在Gruntfile.js中,这个后面会详细介绍
src文件夹里面放的是一个css文件夹,一个js文件夹,css文件夹里面放的是演示的css文件,js文件夹里放的是演示用js文件。
dist 文件夹是放压缩以后的css和js文件
lib文件夹里放html文件
完整的文件结构如下:(grunt安装之前是没有这个文件夹的)
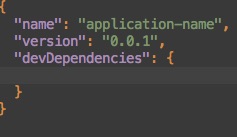
那package.json里面放什么呢?对了,放咱们配置项,刚开始,如果你用的编辑器没有这么智能的话,只能把下面的内容敲到文件中。
ok,万事俱备了,开始下载grunt命令行!
grunt命令行(CLI) 安装在全局环境下,所以命令是这么写!
|
1
|
npm install -g grunt-cli |
注意,mac os 系统、部分linux系统中,在这句话的前面加上“sudo ”指令。
当安装完了以后,进入我们建立的哪个grunt_test文件夹
|
1
|
cd grunt/grunt_test |
这时,就可以安装grunt了输入:
|
1
|
npm install grunt --save-dev |
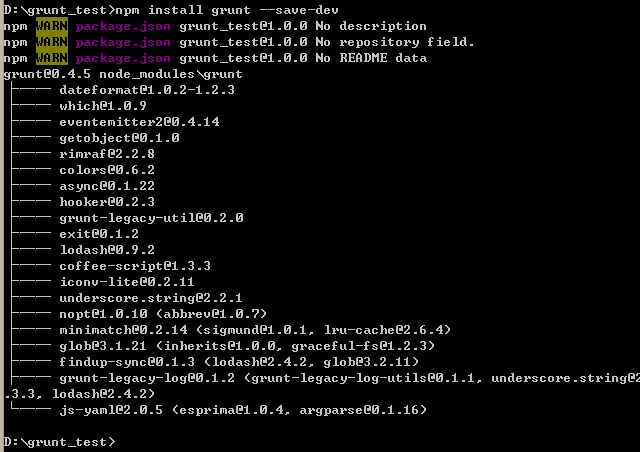
出现了一个node_modules文件夹。大家打开看看就知道里面是什么了。这充分表明grunt已经安装成功。
之前我们没有说过指令中得--save-dev是什么意思
这句话是与package.json这个文件有关的。
这时再看这个文件
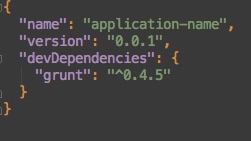
偶?自动把grunt的版本号加上啦。对啦,这就是--save-dev的作用。
这时,在src下面的css和js中各建一个concat文件夹,用于存储合并后的文件
现在还需要几个插件:js、css文件链接成一个文件的插件、压缩的插件、错误检查的插件
安装方法一样
npm install grunt-contrib-concat --save-dev
回车安装,完成后安装下一个,依次类推
npm install grunt-contrib-csslint --save-dev
npm install grunt-contrib-cssmin --save-dev
npm install grunt-contrib-jshint --save-dev
npm install grunt-contrib-uglify --save-dev
npm install grunt-contrib-watch --save-dev
当我们把这些插件都装完后,我们再看package.json
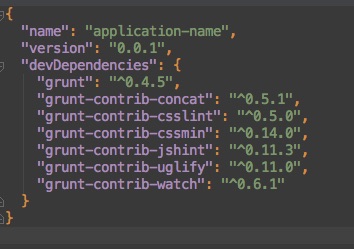
所有的插件的版本号都有了。下一步,需要对Gruntfile.js 进行配置
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
|
module.exports = function(grunt){ //初始化grunt 配置 grunt.initConfig({ //获取package.json的信息 pkg: grunt.file.readJSON('package.json'), //concat插件的配置信息 concat: { options:{ stripBanners:true,
//合并时允许输出头部信息 banner:'/*!<%= pkg.name %> - <%= pkg.version %>-'+'<%=grunt.template.today("yyyy-mm-dd")
%> */' }, cssConcat:{ src:['src/css/css1.css','src/css/css2.css'], dest:'src/css/concat/<%= pkg.name %> - <%= pkg.version %>.css'
//dest 是目的地输出 }, jsConcat:{ src:'src/js/*.js', dest:'src/js/concat/<%=pkg.name %> - <%= pkg.version %>.js' } }, //压缩css cssmin:{ options:{ stripBanners:true,
//合并时允许输出头部信息 banner:'/*!<%= pkg.name %> - <%= pkg.version %>-'+'<%=grunt.template.today("yyyy-mm-dd")
%> */\n' }, build:{ src:'src/css/concat/<%=pkg.name %> - <%=pkg.version %>.css',//压缩是要压缩合并了的 dest:'dist/css/<%= pkg.name %> - <%= pkg.version %>.min.css'
//dest 是目的地输出 } }, //压缩js uglify:{ options:{ stripBanners:true,
//合并时允许输出头部信息 banner:'/*!<%= pkg.name %> - <%= pkg.version %>-'+'<%=grunt.template.today("yyyy-mm-dd")
%> */\n' }, build:{ src:'src/js/concat/<%=pkg.name %> - <%=pkg.version %>.js',//压缩是要压缩合并了的 dest:'dist/js/<%= pkg.name %> - <%= pkg.version %>.min.js'
//dest 是目的地输出 } }, jshint:{ options:{ jshintrc:'.jshint' }, build:['Gruntfile.js','src/js/*js'] }, csslint:{ options:{ csslintrc:'.csslint' }, build:['src/css/*.css'] }, //watch自动化 watch:{ build:{ files:['src/js/*.js','src/css/*.css'], tasks:['jshint','csslint','concat','cssmin','uglify'], options:{spawn:false} } } }); //告诉grunt我们将使用插件 grunt.loadNpmTasks('grunt-contrib-concat'); grunt.loadNpmTasks('grunt-contrib-cssmin'); grunt.loadNpmTasks('grunt-contrib-uglify'); grunt.loadNpmTasks('grunt-contrib-jshint'); grunt.loadNpmTasks('grunt-contrib-csslint'); grunt.loadNpmTasks('grunt-contrib-watch'); //告诉grunt当我们在终端输入grunt时需要做些什么 grunt.registerInitTask('default',['jshint','csslint','concat','cssmin','uglify','watch']);//先进行语法检查,如果没有问题,再合并,再压缩}; |
上面的注释都写的很清楚了,照着这个复制到你得Gruntfile.js里就可以了。
正式压缩前的最后一步:新建两个文件,写入内容,这两个文件是用于css和js代码检查的配置的。大家有兴趣可以从网上查查,这里就不多说了,大家用我这个就没有问题。一个是.csslint ,一个是.jshint
注意这两个文件是.开头的,具体为什么现在还没来得及研究,文件是text格式的,跟Gruntfile是同一级的。

.csslint文件的配置:

{
"adjoining-classes":false,
"box-sizing":false,
"box-model" : false,
"compatible-vendor-prefixes": false,
"floats":false,
"font-sizes":false,
"gradients":false,
"important":false,
"known-properties":false,
"outline-none":false,
"qualified-headings":false,
"regex-selectors":false,
"shorthand":false,
"text-indent":false,
"unique-headings":false,
"universal-selector":false,
"unqualified-attributes":false
}
.jshint文件配置
{
"boss":false,
"curly":true,
"eqeqeq":true,
"expr":true,
"immed":true,
"newcap":true,
"noempty":true,
"noarg":true,
"undef":true,
"regexp":true,
"browser":true,
"devel":true,
"node":true
}
最终最终最终的树结构:
这时,所有的配置都完成了,我们可以进行代码的检查、合并、压缩了~~~
大家在js文件里,css文件里随便写点内容,看看能不能合并压缩成功?
命令是
grunt
然后回车。
这时,你会发现,世界就在你脚下!又会了一项技能,心里那种成就感是无法言表的。大家加油!

















 837
837

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









