




 超级会员免费看
超级会员免费看
 本教程介绍了如何将通过Pix4D预处理的无人机数据,包括无畸变影像和外方位、内参参数,导入到inpho软件中创建航测工程。内容涵盖创建相机、导入去畸变影像、POS文件和控制点,以及创建航带的步骤。
本教程介绍了如何将通过Pix4D预处理的无人机数据,包括无畸变影像和外方位、内参参数,导入到inpho软件中创建航测工程。内容涵盖创建相机、导入去畸变影像、POS文件和控制点,以及创建航带的步骤。
【inpho精品教程】06 无人机数据预处理(导入Pix4D 空三成果)
文章目录
前言
无人机搭载的相机大多是非量测型相机,镜头存在很大的畸变,并且无人机飞行过程中十分不稳定,受气候因素影响很大。GPS精度以及IMU精度也很难保证高精测图要求。Inpho作为航测级软件,对数据的质量要求比较高。基于无人机获取的原始数据质量较差的特点,建议先对原始数据进行预处理,再导入inpho进行后续的处理,下面介绍利用Pix4D预处理的数据导入inpho软件创建工程。
一、Pix4D预处理后的数据成果
Pix4Dmapper计算外方位(X, Y, Z, Omega, Phi, Kappa)和相机参数(焦距,主点,径向畸变和切线畸变)。
由于Inpho中相机畸变参数的定义与Pix4Dmapper中不同,并且这些定义之间的转换是未知的,为了将畸变参数设置为0,必须使用无畸变影像。
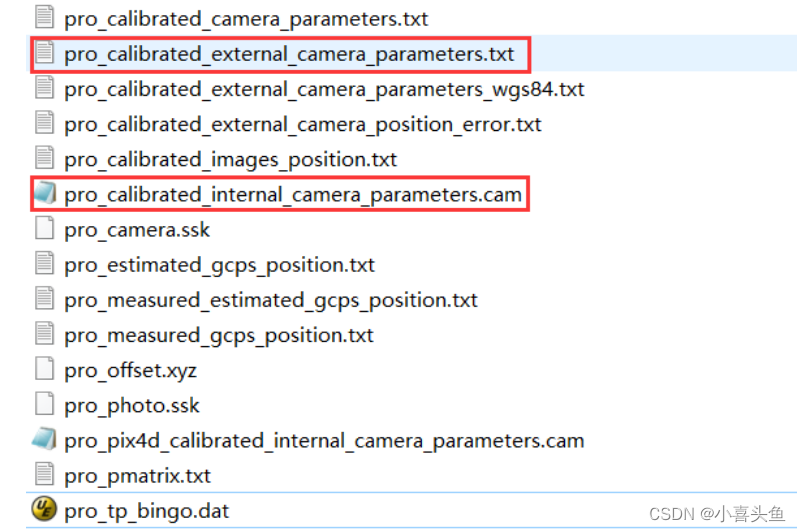
Inpho导入以下参数和文件:
Undistorted images 无畸变的影像
External camera parameters 外方位参数
Internal camera parameters 相机参数
二、Pix4D处理后对应的相机文件和POS文件

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 602
602

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









