




 本文探讨了二维码导航AGV(自动导引车)控制系统的实现,详细讲解了PID控制算法在AGV定位和路径跟踪中的应用。通过C语言实现了位置型、增量型和积分分离型PID控制器,并讨论了抗积分饱和的PID控制策略。
本文探讨了二维码导航AGV(自动导引车)控制系统的实现,详细讲解了PID控制算法在AGV定位和路径跟踪中的应用。通过C语言实现了位置型、增量型和积分分离型PID控制器,并讨论了抗积分饱和的PID控制策略。
二维码导航AGV控制系统研究
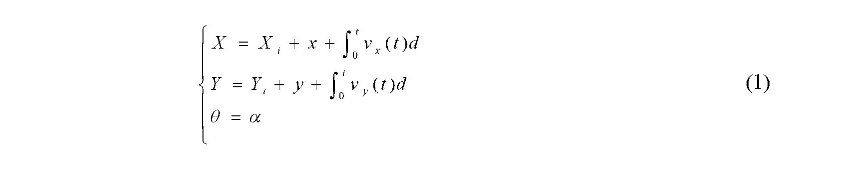
计算出二维码中心相对于图像坐标系原点的位置X1, Y1和二维码的L边线在坐标系中的倾角ɑ1, 经坐标变换后计算AGV相对于二维码的位姿P (x, y, α) [5], 其中x=-x1, y=-y1,。
右转运动方程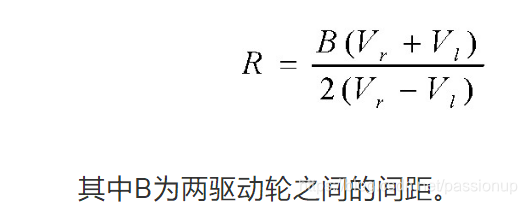
PID的C语言实现
位置型PID的实现
/*偏差不为0,比例环节起作用
* 积分环节用来消除静差,将积累误差加到原有系统上以抵消系统的静差。
* ************************************
* 微分环节,根据偏差信号的变化趋势来进行调节,增加系统的快速性
***********变量说明
* 1.输入量为rin(t)
* 2.输出量为rout(t)
* 3.偏差量为err(t)=rin(t)-rout(t)
* **连续公式u(x)=kp*err(t)+(1/T)*Ierr(t)dt+Td*derr(t)/dt
************离散化
*假设采样间隔为T,在第KT时刻
* err(K)=rin(K)-rout(K)
* 积分环节的表达:(加和)err(K)+err(K+1)+...
* 微分环节的表达:(斜率)[err(K)-err(K-1)]/T
* (位置型) u(K)=kp*err(k)+ki*Eerr(K)+kd*(err(k)-err(k-1))
*/
#include<stdio.h>
#include<stdlib.h>
struct _pid
{
float f_setSpeed;/*设定速度*/
float f_actualSpeed;/*实际速度*/
float f_err;/*偏差值*/
float f_errLast;/*上一个偏差值*/
float f_Kp,f_Ki,f_Kd;/*比例积分微分系数*/
float voltage;/*执行器变量*/
float integral;/*定义积分值*/
}pid;
void PID_init()
{
pid.f_setSpeed=0.0;
pid.f_actualSpeed==0.0;
pid.f_err=0.0;
pid.f_errLast=0.0;
pid.voltage=0.0;
pid.integral=0.0;
pid.f_Kp=0.2;
pid.f_Ki=0.015;
pid.f_Kd=0.2;
}
float PID_realize(float speed)
{
pid.f_setSpeed=speed;
pid.f_err=pid.f_setSpeed-pid.f_actualSpeed;
pid.integral+=pid.f_err;
/*u(K)=kp*err(k)+ki*Eerr(K)+kd*(err(k)-err(k-1))*/
pid.voltage=pid.f_Kp*pid.f_err+pid.f_Ki*pid.integral+pid.f_Kd*(pid.f_err-pid.f_errLast);
pid.f_actualSpeed=pid.voltage;
pid.f_errLast=pid.f_err;
return pid.f_actualSpeed;
}
int main()
{
PID_init();
int cout=0;
while(cout<1000)
{
float speed =PID_realize(200.0);
printf("%4d, %f\n",cout,speed);
++cout;
}
return 0;
}
* ****在启动、结束或大幅度增减设定时,短时间内系统输出有很大的偏
* 差,会造成PID运算的积分积累,导致控制量超过执行机构可能允许的最
* 大动作范围,引起较大的超调,甚至是震荡。
增量型PID的实现
偏差不为0,比例环节起作用
- 积分环节用来消除静差,将积累误差加到原有系统上以抵消系统的静差
- 微分环节,根据偏差信号的变化趋势来进行调节,增加系统的快速性
***********变量说明 - 1.输入量为rin(t)
- 2.输出量为rout(t)
- 3.偏差量为err(t)=rin(t)-rout(t)
- **连续公式u(x)=kp*err(t)+(1/T)Ierr(t)dt+Tdderr(t)/dt
************离散化
*假设采样间隔为T,在第KT时刻 - err(K)=rin(K)-rout(K)
- 积分环节的表达:(加和)err(K)+err(K+1)+…
- 微分环节的表达:(斜率)[err(K)-err(K-1)]/T
- (位置型) u(K)=kperr(k)+kiEerr(K)+kd*(err(k)-err(k-1))
- (增量型)tri U(K)=kp*(err(K)-err(k-1))+kierr(K)+kd(err(K)-2*err(K-1)+err(K-2))
/*偏差不为0,比例环节起作用
* 积分环节用来消除静差,将积累误差加到原有系统上以抵消系统的静差
* 微分环节,根据偏差信号的变化趋势来进行调节,增加系统的快速性
***********变量说明
* 1.输入量为rin(t)
* 2.输出量为rout(t)
* 3.偏差量为err(t)=rin(t)-rout(t)
* **连续公式u(x)=kp*err(t)+(1/T)*Ierr(t)dt+Td*derr(t)/dt
************离散化
*假设采样间隔为T,在第KT时刻
* err(K)=rin(K)-rout(K)
* 积分环节的表达:(加和)err(K)+err(K+1)+...
* 微分环节的表达:(斜率)[err(K)-err(K-1)]/T
* (位置型) u(K)=kp*err(k)+ki*Eerr(K)+kd*(err(k)-err(k-1))
* (增量型)tri U(K)=kp*(err(K)-err(k-1))+ki*err(K)+kd*(err(K)-2*err(K-1)+err(K-2))
*/
#include<stdio.h>
#include<stdlib.h>
/*定义变量*/
struct _pid
{
float f_setSpeed;/*设定速度*/
float f_actualSpeed;/*实际速度*/
float f_err;/*偏差值*/
float f_errLast;/*上一个偏差值*/
float f_errLastL;/*上上一个偏差*/
float f_Kp,f_Ki,f_Kd;/*比例积分微分系数*/
}pid;
/*初始化PID*/
void PID_init()
{
pid.f_setSpeed=0.0;
pid.f_actualSpeed==0.0;
pid.f_err=0.0;
pid.f_errLast=0.0;
pid.f_errLastL=0.0;
pid.f_Kp=0.2;
pid.f_Ki=0.015;
pid.f_Kd=0.2;
}
/*实现增量PID*/
float incrementalPID_realize(float speed)
{
pid.f_setSpeed=speed;
pid.f_err=pid.f_setSpeed-pid.f_actualSpeed;
/*tri U(K)=kp*(err(K)-err(k-1))+ki*err(K)+kd*(err(K)-2*err(K-1)+err(K-2))*/
float incrementalSpeed=pid.f_Kp*(pid.f_err-pid.f_errLast)+pid.f_Ki*pid.f_err+pid.f_Kd*(pid.f_err+pid.f_errLastL-2*pid.f_errLast);
pid.f_actualSpeed+=incrementalSpeed;
pid.f_errLastL=pid.f_errLast;
pid.f_errLast=pid.f_err;
return pid.f_actualSpeed;
}/*算法测试*/
int main()
{
PID_init();
int cout=0;
while(cout<1022)
{
float speed =incrementalPID_realize(200.0);
printf("%4d, %f\n",cout,speed);
++cout;
}
return 0;
}
积分分离型PID的实现
/*偏差不为0,比例环节起作用
* 积分环节用来消除静差,将积累误差加到原有系统上以抵消系统的静差。
* ************************************
* 微分环节,根据偏差信号的变化趋势来进行调节,增加系统的快速性
***********变量说明
* 1.输入量为rin(t)
* 2.输出量为rout(t)
* 3.偏差量为err(t)=rin(t)-rout(t)
* **连续公式u(x)=kp*err(t)+(1/T)*Ierr(t)dt+Td*derr(t)/dt
************离散化
*假设采样间隔为T,在第KT时刻
* err(K)=rin(K)-rout(K)
* 积分环节的表达:(加和)err(K)+err(K+1)+...
* 微分环节的表达:(斜率)[err(K)-err(K-1)]/T
* (位置型) u(K)=kp*err(k)+ki*Eerr(K)+kd*(err(k)-err(k-1))
*/
#include<stdio.h>
#include<stdlib.h>
struct _pid
{
float f_setSpeed;/*设定速度*/
float f_actualSpeed;/*实际速度*/
float f_err;/*偏差值*/
float f_errLast;/*上一个偏差值*/
float f_Kp,f_Ki,f_Kd;/*比例积分微分系数*/
float voltage;/*执行器变量*/
float integral;/*定义积分值*/
float f_KpFlag;/*积分标志位*/
}pid;
void PID_init()
{
pid.f_setSpeed=0.0;
pid.f_actualSpeed==0.0;
pid.f_err=0.0;
pid.f_errLast=0.0;
pid.voltage=0.0;
pid.integral=0.0;
pid.f_Kp=0.2;
pid.f_Ki=0.015;
pid.f_Kd=0.2;
pid.f_KpFlag=0;
}
float PID_realize(float speed)
{
pid.f_setSpeed=speed;
pid.f_err=pid.f_setSpeed-pid.f_actualSpeed;
if(abs(pid.f_err)>10)
{
pid.f_kpFlag=0;
}
else{
pid.integral+=pid.f_err;
pid.f_kpFlag=0;
}
/*u(K)=kp*err(k)+ki*Eerr(K)+kd*(err(k)-err(k-1))*/
pid.voltage=pid.f_Kp*pid.f_err+pid.f_Ki*pid.integral+pid.f_Kd*(pid.f_err-pid.f_errLast);
pid.f_actualSpeed=pid.voltage;
pid.f_errLast=pid.f_err;
return pid.f_actualSpeed;
}
int main()
{
PID_init();
int cout=0;
while(cout<1000)
{
float speed =PID_realize(200.0);
printf("%4d, %f\n",cout,speed);
++cout;
}
return 0;
}
/*偏差不为0,比例环节起作用
* 积分环节用来消除静差,将积累误差加到原有系统上以抵消系统的静差。
* ******************积分分离PID控制
* 当被控量与设定值偏差较大时,取消积分作用,当被控量接近给定值时
* ,引入积分控制,消除静差,提高精度。
* ************************************
* 微分环节,根据偏差信号的变化趋势来进行调节,增加系统的快速性
***********变量说明
* 1.输入量为rin(t)
* 2.输出量为rout(t)
* 3.偏差量为err(t)=rin(t)-rout(t)
* **连续公式u(x)=kp*err(t)+(1/T)*Ierr(t)dt+Td*derr(t)/dt
************离散化
*假设采样间隔为T,在第KT时刻
* err(K)=rin(K)-rout(K)
* 积分环节的表达:(加和)err(K)+err(K+1)+...
* 微分环节的表达:(斜率)[err(K)-err(K-1)]/T
* (位置型) u(K)=kp*err(k)+ki*Eerr(K)+kd*(err(k)-err(k-1))
* (增量型)trℹ U(K)=kp*(err(K)-err(k-1))+ki*err(K)+kd*(err(K)-2*err(K-1)+err(K-2))
*/
#include<stdio.h>
#include<stdlib.h>
const int Vl=2;
const int t=1;//
const int B=50;
struct _pid
{
float f_set;/*设定速度*/
float f_actual;/*实际速度*/
float f_e;/*偏差值*/
float f_eLast;/*上一个偏差值*/
float f_Kp,f_Ki,f_Kd;/*比例积分微分系数*/
float P;/*执行器变量*/
float integral;/*定义积分值*/
int int_KpFlag;
}ypid,qpid;
void PID_init()
{
/*位置pid纠正初始化*/
ypid.f_set=0.0;
ypid.f_actual=0.0;
ypid.f_e=0.0;
ypid.f_eLast=0.0;
ypid.P=1;
ypid.integral=0.0;
ypid.f_Kp=0.2;
ypid.f_Ki=8;
ypid.f_Kd=67;
/*角度pid纠正初始化*/
qpid.f_set=0.0;
qpid.f_actual=0;
qpid.f_e=0;
qpid.f_eLast=0.0;
qpid.P=1;
qpid.integral=0.0;
qpid.f_Kp=28.9;
qpid.f_Ki=89;
qpid.f_Kd=1;
}
void YPID_realize(float postion,float en,float angle,float aen)
{
ypid.f_actual=postion;
ypid.f_e=postion;
qpid.f_actual=angle;
qpid.f_e=angle;
int cout=0;
while((abs(ypid.f_e)>en*0.2||abs(qpid.f_e)>aen*0.2)&&cout<1000)
{
float Vc=(1+(ypid.P-1)/2)*Vl;//中心速度
float v=(1-ypid.P)*Vl;//差速
//ypid.f_e=ypid.f_e+(2*(abs(1-ypid.P)*Vl*t))/B;
qpid.f_e=qpid.f_e+2*v*t/B;
ypid.f_e=ypid.f_e+Vc*1*t+Vc*v*t*t/B;//纠正之后的误差
/*位移的分离积分PID*/
if(abs(ypid.f_e)>=en*1)
{
ypid.int_KpFlag=0;
}
else
{
ypid.integral+=ypid.f_e;
if(abs(ypid.f_e)<en&&abs(ypid.f_e)>=en*0.5)
{
ypid.int_KpFlag=0.2;
}
else if(abs(ypid.f_e)<en*0.5&&abs(ypid.f_e)>=en*0.3){
ypid.int_KpFlag=0.5;
}
else
{
ypid.int_KpFlag=1;
}
}
/*u(K)=kp*err(k)+ki*Eerr(K)+kd*(err(k)-err(k-1))*/
ypid.P=ypid.f_Kp*ypid.f_e+ypid.int_KpFlag*ypid.f_Ki*ypid.integral+ypid.f_Kd*(ypid.f_e-ypid.f_eLast);
/******/
/**角度的积分分离的PID*/
if(abs(qpid.f_e)>=aen*1)
{
qpid.int_KpFlag=0;
}
else
{
qpid.integral+=qpid.f_e;
if(abs(qpid.f_e)<aen&&abs(qpid.f_e)>=aen*0.5)
{
qpid.int_KpFlag=0.2;
}
else if(abs(qpid.f_e)<aen*0.5&&abs(qpid.f_e)>=aen*0.3){
qpid.int_KpFlag=0.5;
}
else
{
qpid.int_KpFlag=1;
}
}
/*u(K)=kp*err(k)+ki*Eerr(K)+kd*(err(k)-err(k-1))*/
qpid.P=qpid.f_Kp*qpid.f_e+qpid.int_KpFlag*qpid.f_Ki*qpid.integral+qpid.f_Kd*(qpid.f_e-qpid.f_eLast);
qpid.P=abs(qpid.P)>3?3:qpid.P;
ypid.P=abs(ypid.P)>3?3:qpid.P;
/****/
ypid.f_eLast=ypid.f_e;
qpid.f_eLast=qpid.f_e;
printf("%4d, en=%0.2f,aen=%0.1f,yP=%5.2f qP=%5.2f ye=%0.2f qe=%0.2f\n",cout++,en,aen,ypid.P,qpid.P,ypid.f_e,qpid.f_e);
}
}
int main()
{
PID_init();
YPID_realize(10,1,60,2);
return 0;
}
抗积分饱和的PID控制算法
由于积分作用不断累加,导致执行机构达到极限位置,执行器开度不可能再增大。出现反向偏差,从饱和区退出。进入饱和区越深退出饱和区时间越长。在这段时间内执行机构停留在极限位置不随偏差反向做出改变,系统像失控般,造成控制性能恶化。
方法:在计算u(k)时,判断上一时刻的控制量u(k-1)是否超出极限范围:如果>max,只累加负偏差;如果<min,只累加正偏差,避免长期停留在饱和区。
/*偏差不为0,比例环节起作用
* 积分环节用来消除静差,将积累误差加到原有系统上以抵消系统的静差。
* ************************************
* 微分环节,根据偏差信号的变化趋势来进行调节,增加系统的快速性
***********变量说明
* 1.输入量为rin(t)
* 2.输出量为rout(t)
* 3.偏差量为err(t)=rin(t)-rout(t)
* **连续公式u(x)=kp*err(t)+(1/T)*Ierr(t)dt+Td*derr(t)/dt
************离散化
*假设采样间隔为T,在第KT时刻
* err(K)=rin(K)-rout(K)
* 积分环节的表达:(加和)err(K)+err(K+1)+...
* 微分环节的表达:(斜率)[err(K)-err(K-1)]/T
* (位置型) u(K)=kp*err(k)+ki*Eerr(K)+kd*(err(k)-err(k-1))
*/
#include<stdio.h>
#include<stdlib.h>
struct _pid
{
float f_setSpeed;/*设定速度*/
float f_actualSpeed;/*实际速度*/
float f_err;/*偏差值*/
float f_errLast;/*上一个偏差值*/
float f_Kp,f_Ki,f_Kd;/*比例积分微分系数*/
float voltage;/*执行器变量*/
float integral;/*定义积分值*/
float umax;/*极大值*/
float umin;/*极小值*/
}pid;
void PID_init()
{
pid.f_setSpeed=0.0;
pid.f_actualSpeed==0.0;
pid.f_err=0.0;
pid.f_errLast=0.0;
pid.voltage=0.0;
pid.integral=0.0;
pid.f_Kp=0.2;
pid.f_Ki=0.015;
pid.f_Kd=0.2;
pid.umax=400;
pid.umin=-200;
}
float PID_realize(float speed)
{int index;
pid.f_setSpeed=speed;
pid.f_err=pid.f_setSpeed-pid.f_actualSpeed;
if(pid.f_actualSpeed>pid.umax)
{
if(abs(pid.f_err)>10)
{
index=0;
}
else{
index=1;
if(pid.err<0)
{
pid.integral+=pid.err
}
}
}
else if(pid.f_actualSpeed<pid.umin)
{
if(abs(pid.f_err)>10)
{
index=0;
}
else{
index=1;
if(pid.err>0)
{
pid.integral+=pid.err
}
}
}
/*u(K)=kp*err(k)+ki*Eerr(K)+kd*(err(k)-err(k-1))*/
pid.voltage=pid.f_Kp*pid.f_err+index*pid.f_Ki*pid.integral+pid.f_Kd*(pid.f_err-pid.f_errLast);
pid.f_actualSpeed=pid.voltage;
pid.f_errLast=pid.f_err;
return pid.f_actualSpeed;
}
int main()
{
PID_init();
int cout=0;
while(cout<1000)
{
float speed =PID_realize(200.0);
printf("%4d, %f\n",cout,speed);
++cout;
}
return 0;
}
r
}
}
}
/*u(K)=kp*err(k)+ki*Eerr(K)+kd*(err(k)-err(k-1))*/
pid.voltage=pid.f_Kp*pid.f_err+index*pid.f_Ki*pid.integral+pid.f_Kd*(pid.f_err-pid.f_errLast);
pid.f_actualSpeed=pid.voltage;
pid.f_errLast=pid.f_err;
return pid.f_actualSpeed;
}
int main()
{
PID_init();
int cout=0;
while(cout<1000)
{
float speed =PID_realize(200.0);
printf("%4d, %f\n",cout,speed);
++cout;
}
return 0;
}

















 1450
1450

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









