



 本文介绍了图像处理中的边缘检测技术,包括边缘的概念、检测方法及其实现步骤。详细讲解了Sobel算子和Canny算法的工作原理,并通过示例代码展示了这两种方法的应用。
本文介绍了图像处理中的边缘检测技术,包括边缘的概念、检测方法及其实现步骤。详细讲解了Sobel算子和Canny算法的工作原理,并通过示例代码展示了这两种方法的应用。
1 什么是边缘?
边缘是图像强度函数快速变化的地方
2 如何检测边缘?
为了检测边缘,我们需要检测图像中的不连续性,可以使用导数来检测不连续性。
3 图像梯度
梯度就是X方向的箭头和Y方向的箭头的和。假设某一点上,x的偏导数为3,y的偏导数为-1,则该点的梯度就是(3,-1)
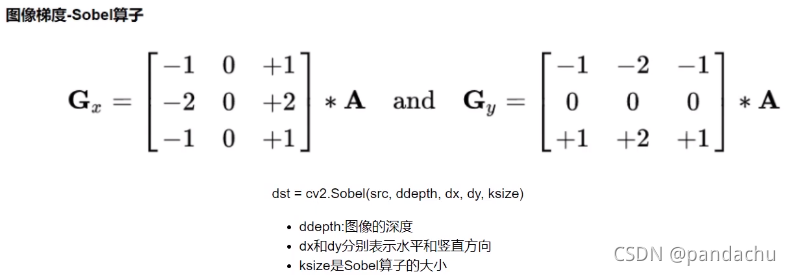
4 Sobel算子
x和y方向的Sobel算子分别为:
拿下图举例
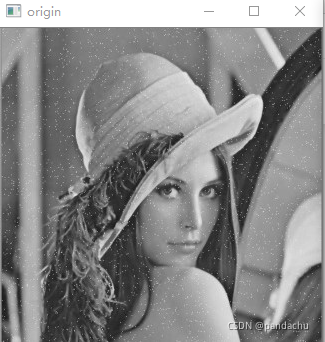
img=cv2.imread('src/noise0.jpg',cv2.IMREAD_GRAYSCALE)
sobel_x1=cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
sobel_x2=cv2.convertScaleAbs(sobel_x1)
sobel_y1=cv2.Sobel(img,cv2.CV_64F,0,1,ksize=3)
sobel_y2=cv2.convertScaleAbs(sobel_y1)
sobel_xy1=cv2.addWeighted(sobel_x2,0.5,sobel_y2,0.5,0)
sobel_xy2=cv2.convertScaleAbs(sobel_xy1)
cv2.imshow('origin',img)
cv2.imshow('sobel_x',sobel_x1)
cv2.imshow('sobel_x & ScaleAbs',sobel_x2)
cv2.imshow('sobel_y',sobel_y1)
cv2.imshow('sobel_y & ScaleAbs',sobel_y2)
cv2.imshow('sobel_xy',sobel_xy1)
cv2.imshow('sobel_xy & ScaleAbs',sobel_xy2)
cv2.waitKey(0)
cv2.destroyAllWindows()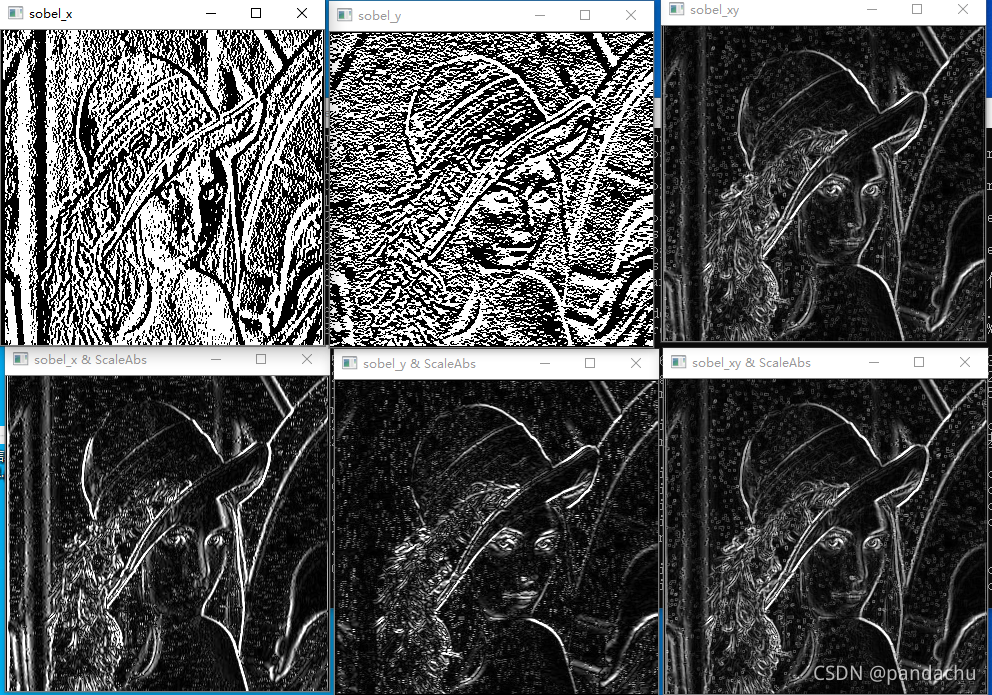
5 Canny边缘检测
在目前常用的边缘检测方法中,Canny边缘检测算法是具有严格定义的,可以提供良好可靠检测的方法之一。由于它具有满足边缘检测的三个标准和实现过程简单的优势,成为边缘检测最流行的算法之一。
完成一个Canny边缘检测算法可以分为以下四步:
| 高斯滤波 | 目的 |
|---|---|
| 1.高斯滤波 | 去噪声降低错误率 |
| 2.计算梯度幅值和方向 | 估计每一点处的边缘强度与方向 |
| 3.非极大值抑制(NMS) | 对Sobel、Prewitt等算子的结果进一步细化 |
| 4应用双阈值(Double-Threshold)检测 | 确定真实的和可能的边缘。 |
还是使用上图
img = cv2.imread("src/noise0.jpg", 0) # 由于Canny只能处理灰度图,所以将读取的图像转成灰度图
img1 = cv2.GaussianBlur(img,(3,3),0) # 用高斯平滑处理原图像降噪。若效果不好可调节高斯核大小
canny = cv2.Canny(img1, 80, 100) # 调用Canny函数,指定最大和最小阈值,其中apertureSize默认为3。
cv2.imshow('Canny', canny)
cv2.waitKey(0)
cv2.destroyAllWindows()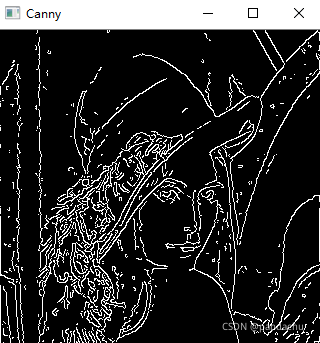

















 3258
3258

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









