



无信号T型交叉口自动驾驶的概率性碰撞威胁评估:汇入主路交通流及被支路交通流汇入
摘要
本文提出了一种用于无信号T型交叉口自动驾驶的概率性碰撞威胁评估算法,该算法能够以可靠性和鲁棒性对无信号T型交叉口的交通状况进行评估,使自动驾驶车辆(AV)能够安全通过无信号T型交叉口。为此,所提出的算法利用详细数字地图预测观测到的车辆的未来路径,并利用这些预测的未来路径识别潜在威胁——即可能对自动驾驶车辆构成威胁的观测车辆。接着,算法建立与这些潜在威胁之间的车与车之间的碰撞关系。然后,采用贝叶斯网络和时间窗口滤波,在存在不确定性和不完整噪声数据的情况下,对潜在威胁发生碰撞的可能性进行可靠且鲁棒的评估。我们通过在无信号T型交叉口开展实车测试,针对两种典型操作——汇入主路交通流和被次路交通流汇入——对该算法进行了测试与评估。实车测试结果表明,该算法在可靠性与鲁棒性方面表现足够可靠,可用于无信号T型交叉口自动驾驶决策。
索引术语 —自动驾驶汽车,汇入,概率推理,威胁评估,T型交叉口。
一、引言
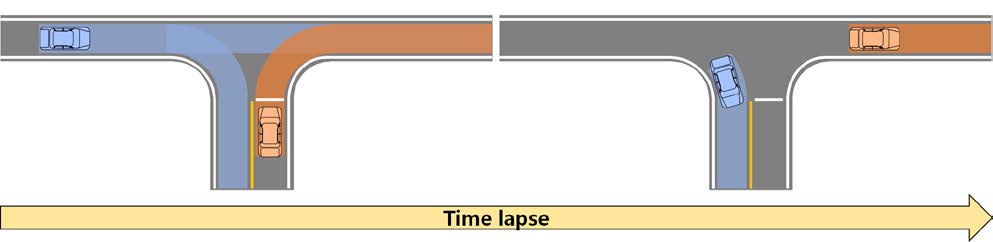
无信号T型交叉口是现代交通网络中事故多发且危险的路段之一,因为这些位置在没有交通管制的情况下,不同路径会分离或汇合,而诸如汇入主路交通流和被次路交通流汇入等操作有可能引发碰撞。特别是,汇入操作是自动驾驶中风险最高的操作之一,因为驾驶员不仅需要注意前方车辆,还需留意主路上后方来车。根据在美国和欧洲进行的统计,无信号T型交叉口在所有道路交叉口场景中的事故发生率最高,其中40%的道路伤害事故发生在[1]–[3]。因此,对于自动驾驶汽车(AV)而言,无信号T型交叉口的自动驾驶是道路安全领域最具挑战性的任务之一。图1中描述了无信号T型交叉口的示例。
 城市环境 和 (b) 乡村环境。)
城市环境 和 (b) 乡村环境。)
在本研究中,我们旨在解决自动驾驶车辆(AV)如何安全无碰撞地通过无信号T型交叉口的问题。为此,我们提出了一种针对无信号T型交叉口的自动驾驶概率性碰撞威胁评估方法,能够在不确定且不完整的噪声数据条件下,对无信号T型交叉口处的交通状况进行可靠且鲁棒的评估。所提出的算法利用详细数字地图,在车道级预测在无信号T型交叉口附近观测到的车辆的未来路径,并基于这些预测的未来路径识别潜在威胁——即可能对自动驾驶车辆(AV)构成威胁的观测车辆——并将其分类为相关车辆。接着,该算法建立与已识别的相关车辆之间的车对车碰撞关系(V2V-CRs)。然后,该算法采用贝叶斯网络,在考虑输入数据不确定性的前提下,即使在存在不确定噪声数据的情况下,也能可靠地评估相关车辆发生碰撞的可能性。随后,该算法采用时间窗口滤波,通过滤除因车辆跟踪过程中存在的不确定且不完整的噪声数据而导致的估计不完整的推理结果,从而对给定的交通状况进行鲁棒评估。
我们通过在无信号T型交叉口进行实车测试,对所提出的算法进行了测试和评估,涉及两个典型操作:汇入主路交通流和被次路交通流汇入。
II. 相关工作
有几项研究针对汇入问题进行了探讨。希达斯[4],、厄姆森[5],和马林内斯库[6]采用了基于时隙的协同汇入控制方法,其中时隙表示主路上目标车道中两辆车辆之间的空闲区域。该基于时隙的方法会检查主路目标车道中每个时隙的汇入可行性,然后找到可实现可接受汇入加速度的最佳可行时隙。尽管该方法在解决汇入问题方面表现出可靠的性能,但其应用仅限于高速公路环境下的匝道交通状况。
关于无信号T型交叉口的汇入问题(该问题可被视为无信号道路交叉口自动驾驶问题之一),大多数先前的研究主要依赖于车对车(V2V)[7]–[11]和车对基础设施(V2I)[12]–[14]等协同通信技术。在[7],中,伊瓦涅斯‐古兹曼提出了一种利用车对车(V2V)通信提升道路交叉口安全性的协同车辆系统。在[8]–[10],中,阿齐米提出了用于协调车辆通过道路交叉口运动的车对车(V2V)交叉口协议,并展示了使用所提协议穿越道路交叉口时自动驾驶安全性的改善。在[11],中,德雷斯纳提出了一种应对人类驾驶车辆与自动驾驶车辆在道路上同时行驶的交通场景的解决方案。在[12],中,德雷斯纳提出了一种称为自主交叉口管理的多代理方法,用于无信号道路交叉口的交通管理。在他的方法中,车辆在接近交叉口时提前向交叉口的预约管理代理“呼叫”,以预订无碰撞轨迹。此外,还有一些研究受到德雷斯纳工作的启发[12], ,例如多交叉口优化[13] ,以及根据相对优先级和等待时间对预约进行排序[14]。上述涉及车对基础设施(V2I)和车对车(V2V)通信的方法,在假设所有车辆均具备车对基础设施(V2I)或车对车(V2V)通信能力的前提下,为城市环境中无信号T型交叉口的汇入或无信号交叉口的自动驾驶提供了可靠的解决方案。然而,此类通信技术预计仅能在中长期范围内普及至所有车辆。此外,这些研究主要关注从支路汇入主路的问题,而较少关注主路上车辆被支路车辆汇入的情况。
所提出的算法受到舒伯特研究[15]–[17],的启发,该研究是一种成熟的贝叶斯网络方法,无需借助协同通信。在[15],[16],中,他提出了一种贝叶斯方法,以在噪声观测下可靠地评估给定的交通状况。他利用减速至安全时间作为标准来分析车辆之间的时空关系,并采用贝叶斯网络来评估与自动变道相关的交通状况。在[17],中,他提供了基于贝叶斯网络的碰撞威胁评估更详细的实践验证。尽管他的方法能够处理不确定的测量,所需超参数数量适中,且无需任何协同通信的帮助;然而,它仅限于非常受限的高速公路场景:在高速公路上行驶时变更或保持当前车道。此外,它仅关注当前车道和相邻车道内的被观测车辆。
III. 概率性碰撞威胁评估
安全是自动驾驶车辆(AV)领域的首要任务。因此,关于安全的碰撞威胁评估已成为自动驾驶车辆的关键组成部分。在本节中,我们详细介绍了自动驾驶车辆安全通过无信号T型交叉口的碰撞威胁评估算法——特别是针对两种典型操作:汇入主路交通流和被支路交通流汇入。
A. 车辆未来路径预测
在文献中,由于道路网络是一种结构化环境[18]–[20],通常假设车辆的运动模式可以提前识别;例如,可以通过在道路网络的特定位置识别所有可能的操作,从数字地图中提取这些模式。这是因为此类数字地图中包含的上下文信息(即无信号T型交叉口的几何和拓扑特征)能够有效指示每辆车辆的行驶意图。因此,本文提出的算法利用详细数字地图,在无信号T型交叉口的给定交通状况下,对观测到的车辆进行车道级未来路径预测;也就是说,通过将观测到的车辆投影到详细数字地图上,确定每辆被观测车辆在车道级的一组有限的未来路径(见图2)。

B. 车对车碰撞关系
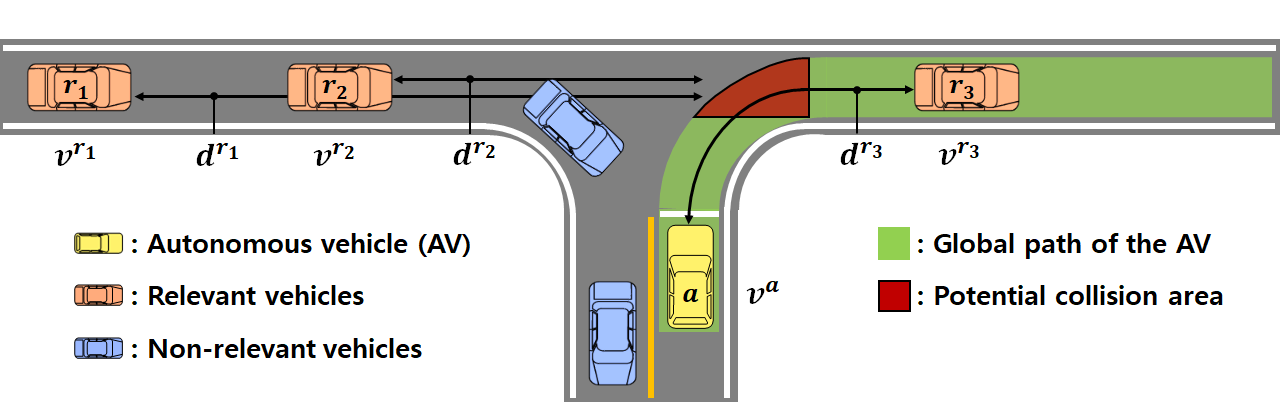
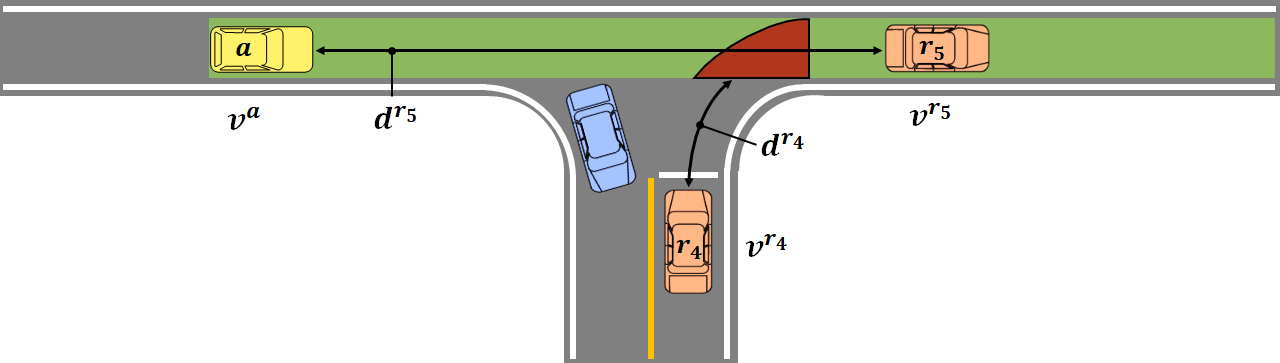
在给定无信号T型交叉口某一交通状况下所有观测车辆的预测未来路径时,所提出的算法仅关注那些与自动驾驶车辆(AV)的全局路径重叠的未来路径。因为该算法认为只有这些未来路径才会对自动驾驶车辆(AV)构成威胁。在此过程中,它识别相关车辆,并在自动驾驶车辆(AV)与每个相关车辆之间建立车对车碰撞关系(V2V-CRs)。并且,它将其余观测到的车辆分类为非相关车辆;由于认为这些车辆不会对自动驾驶车辆(AV)构成威胁,因此不对其进行评估。换句话说,它仅针对相关车辆评估发生碰撞的可能性,这可以被视为一种计算上高效的方法。
图3展示了无信号交叉口处车对车通信关系(V2V-CRs)的一个示例。在图3中,黄色、橙色和蓝色车辆分别表示自动驾驶车辆(AV)、相关车辆和非相关车辆。自动驾驶车辆(AV)和相关车辆分别用 a和ri表示,其中 i代表唯一的车辆轨迹ID编号。绿线表示自动驾驶车辆(AV)的全局路径。所提出的算法针对图3a的情况与相关车辆 r1、 r2和 r3建立车对车碰撞关系(V2V-CRs),针对图3b的情况与相关车辆 r4和 r5建立车对车碰撞关系(V2V-CRs)。红色区域表示在无信号T型交叉口内相关车辆的未来路径与自动驾驶车辆(AV)的全局路径相重叠的区域;该区域被称为潜在碰撞区域(PCA)。沿道路曲率从相关车辆ri到潜在碰撞区域(PCA)或到自动驾驶车辆(AV)的距离用 dr i表示。 a(自动驾驶车辆(AV))和相关车辆 ri的速度分别用 va和 vr i表示。
 汇入主路交通的情况。自动驾驶车辆(AV)与相关车辆r1、 r2和 r3之间建立了车对车通信关系。(b) 被支路交通汇入的情况。自动驾驶车辆(AV)与相关车辆r4和 r5之间建立了车对车通信关系。)
汇入主路交通的情况。自动驾驶车辆(AV)与相关车辆r1、 r2和 r3之间建立了车对车通信关系。(b) 被支路交通汇入的情况。自动驾驶车辆(AV)与相关车辆r4和 r5之间建立了车对车通信关系。)
C. 推理结构
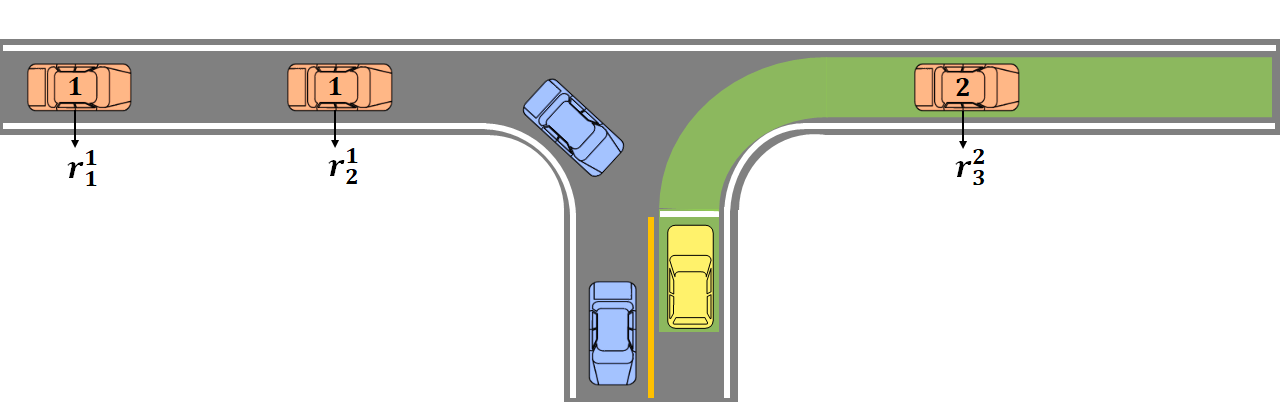
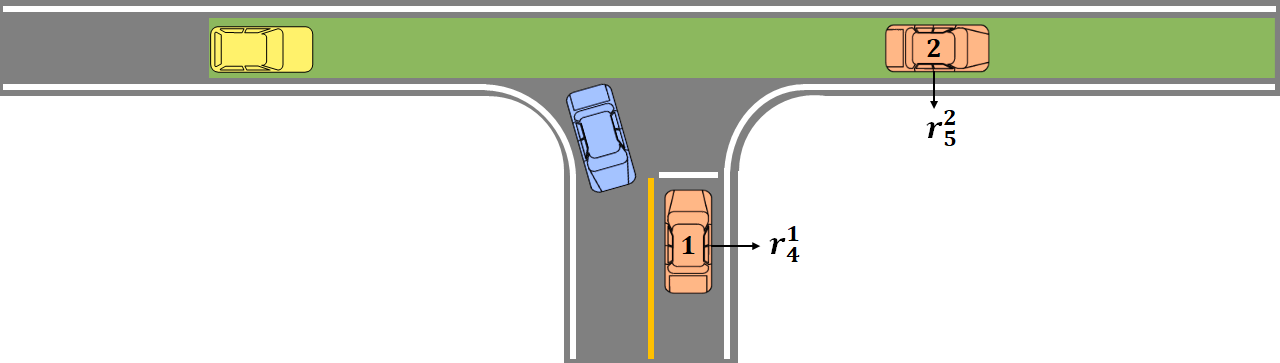
为了在无信号灯控制的T型交叉口系统地评估给定的交通状况及其相关风险,将相关车辆分为两类:第一类是未来路径会并入自动驾驶车辆(AV)全局路径的相关车辆,第二类是位于自动驾驶车辆(AV)全局路径上的相关车辆(见图4)。在图4中,属于 k组的相关车辆用r k i 表示;即每辆相关车辆上的数字代表其所属的组号。随后为这两个组各自分配一个推理代理;推理代理的主要作用是分析自动驾驶车辆(AV)与该组内相关车辆之间的时空关系,并进行评估与碰撞可能性相关的相关车辆。
 自动驾驶车辆(AV)汇入主路交通流的情况;(b) 自动驾驶车辆(AV)被支路交通流汇入的情况。属于 k组的相关车辆用 rik表示,其中 k代表它们所属的组编号,i代表唯一的车辆轨迹ID编号。)
自动驾驶车辆(AV)汇入主路交通流的情况;(b) 自动驾驶车辆(AV)被支路交通流汇入的情况。属于 k组的相关车辆用 rik表示,其中 k代表它们所属的组编号,i代表唯一的车辆轨迹ID编号。)
D. 威胁度量
本文中,我们利用碰撞时间(TTC)作为评估无信号T型交叉口特定交通状况下潜在威胁的准则。由于碰撞时间能够代表空间接近性和速度差[21],[22],因此在许多碰撞缓解系统中,它一直被广泛用作评估给定交通状况下潜在威胁的准则。TTC的计算公式定义如下:
$$
x_{r_k^i}(t) =
\begin{cases}
\frac{d_{r_k^i}(t)}{v_{r_k^i}(t)}, & \text{for } \frac{d_{r_k^i}(t)}{v_{r_k^i}(t)} > 0 \
+\infty, & \text{for otherwise}
\end{cases}
$$
其中,$d_{r_k^i}(t)$ 是沿道路曲率从当前位置到PCA或自动驾驶车辆(AV)的纵向距离。在时间 $t$ 时,分配给组 $k$ 的相关车辆$r_k^i$ 的速度用 $v_{r_k^i}(t)$ 表示。
E. 基于贝叶斯网络的概率推理
自动驾驶车辆(AV)的碰撞威胁评估主要挑战在于,即使在不确定且不完整的噪声数据条件下,仍需在给定交通状况下可靠且鲁棒地评估潜在威胁。为应对不确定性,我们采用贝叶斯网络[15],[23]来评估相关车辆发生碰撞的可能性,同时考虑输入数据的不确定性。对于一辆相关车辆,我们根据前述威胁度量定义了三个威胁等级,每个等级代表关于碰撞可能性的整体威胁程度,具体如下:
$$
z \in Z={\text{Dangerous}, \text{Attentive}, \text{Safe}}={D, A, S}
$$
其中 $z$ 是一个随机变量,表示相关车辆的威胁等级或给定交通状况下的威胁等级。
在相关车辆的威胁等级条件下,碰撞时间值的似然函数需要定义碰撞时间的阈值,例如$x_D$ 和 $x_A$。这些阈值可用于参数化碰撞威胁评估;我们根据车辆跟踪性能[24]以及国际安全标准[25],[26],将 $x_D$ 和 $x_A$ 分别赋值为3.0秒和6.0秒。此外,在构建似然函数时,使用了表示为 $\sigma_{x_{r_k^i}}$ 的不确定性度量,以考虑分配给组$k$ 的相关车辆的碰撞时间值的不确定性。
在相关车辆的威胁等级条件下,碰撞时间值的似然函数现在可以定义如下:
$$
p(x_{r_k^i}(t) | z= D) \propto
\begin{cases}
\exp\left(-\frac{(x_{r_k^i}(t) - x_D)^2}{2\sigma_{x_{r_k^i}}^2}\right), & \text{for } x_{r_k^i}(t) > x_D \
1, & \text{for otherwise}
\end{cases}
$$
$$
p(x_{r_k^i}(t) | z= A) \propto
\begin{cases}
\exp\left(-\frac{(x_{r_k^i}(t) - x_A)^2}{2\sigma_{x_{r_k^i}}^2}\right), & \text{for } x_{r_k^i}(t) > x_A \
\exp\left(-\frac{(x_{r_k^i}(t) - x_D)^2}{2\sigma_{x_{r_k^i}}^2}\right), & \text{for } x_{r_k^i}(t) < x_D \
1, & \text{for otherwise}
\end{cases}
$$
$$
p(x_{r_k^i}(t) | z= S) \propto
\begin{cases}
\exp\left(-\frac{(x_{r_k^i}(t) - x_A)^2}{2\sigma_{x_{r_k^i}}^2}\right), & \text{for } x_{r_k^i}(t) < x_A \
1, & \text{for otherwise}
\end{cases}
$$
其中 $x_D$ 和 $x_A$ 分别表示“危险”和“注意”威胁等级对应的碰撞时间值阈值。在时间 $t$,分配给组 $k$ 的相关车辆 $r_k^i$ 的碰撞时间值不确定性由 $\sigma_{x_{r_k^i}}$ 表示。
在假设潜在威胁的威胁等级的先验概率质量函数 $P(z)$ 服从均匀分布的前提下,可根据贝叶斯定理确定给定碰撞时间值时该相关车辆威胁等级的概率分布,如下所示:
$$
P(z_{r_k^i}(t) | x_{r_k^i}(t)) = \frac{p(x_{r_k^i}(t) | z)}{N_Z \sum_{j=1}^{Z(j)} p(x_{r_k^i}(t) | Z(j))}
$$
其中 $P(z_{r_k^i}(t) | x_{r_k^i}(t))$ 表示在时间 $t$ 给定碰撞时间值 $x_{r_k^i}(t)$ 时,相关车辆 $r_k^i$ 威胁等级的概率分布。集合 $Z$ 的第 $j$ 个元素记为 $Z(j)$。参数 $N_Z$ 表示集合 $Z$ 中威胁等级的数量。
可通过最大化前述威胁等级概率分布所得概率的参数,来确定相关车辆的推断威胁等级,如下所示:
$$
\hat{z}
{r_k^i}(t) = \arg\max
{z_{r_k^i}(t)} P(z_{r_k^i}(t) | x_{r_k^i}(t)) \in Z
$$
其中,$\hat{z}_{r_k^i}(t)$ 表示在时间 $t$ 分配给组 $k$ 的相关车辆 $r_k^i$ 的推断威胁等级。
F. 基于时间窗口滤波的鲁棒性评估
对于每个推理代理,通过仅考虑其所属组内所有相关车辆中最紧迫威胁的威胁等级概率分布结果,来确定与其组相关的当前交通状况的威胁等级概率分布,如下所示:
$$
P(z_t^k) = P(z_{r_m^k} | x_{r_m^k}(t))
$$
其中,$P(z_t^k)$ 表示与组 $k$ 相关的当前交通状况下威胁等级的概率分布。组 $k$ 内所有相关车辆中最紧迫威胁由 $r_m^k$ 表示。在时间 $t$,组 $k$ 中最紧迫威胁的威胁等级概率分布表示为 $P(z_{r_m^k} | x_{r_m^k}(t))$。
现在,可以通过一种参数来确定与每组相关的当前交通状况的推断威胁等级,该参数能够最大化上述威胁等级概率分布所产生的概率,如下所示:
$$
\hat{z}
t^k = \arg\max
{z_t^k} P(z_t^k) \in Z
$$
其中,$\hat{z}_t^k$ 表示在时间 $t$ 时与组 $k$ 相关的当前交通状况的推断威胁等级。
为了使自动驾驶车辆(AV)能够在交通状况中安全运行,需要具备即使在不完整噪声数据情况下也能对给定交通状况进行鲁棒评估的能力。本文采用时间窗口滤波器 [27],以滤除由于与车辆跟踪相关的不确定且不完整的噪声数据导致的不完整估计推理结果;例如,在给定时间窗口内检测到误检车辆或偶尔遗漏真实车辆时。
IV. 实验结果
为了验证所提出算法的可行性,本节展示了在无信号T型交叉口进行实车测试的实验结果,测试涵盖了多种测试用例中的两个典型场景:第一个测试用例是自动驾驶车辆(AV)汇入主路交通流;第二个测试用例是自动驾驶车辆(AV)沿主路行驶时,另一车辆从支路汇入主路交通流。各种测试用例下无信号T型交叉口完全自动驾驶演示的详细视频可访问 https://youtu.be/qVxsfxdAwJU 获取。该视频包含了实验(自车)车辆配置信息,如硬件平台和传感器配置。实车测试与算法开发、现场数据记录以及通过ROS中RViz工具对记录数据回放进行的本地测试紧密结合[28]。
A. 定性分析
图5和图6所示为所提出的算法在两个考虑的测试用例中的实验结果。在这些图片中,灰色线条表示来自详细数字地图的车道级地图数据;白色道路上的绿色矩形表示人行横道——白色矩形表示街道上的人行横道,绿色矩形表示人行道上的人行横道;棕色汽车表示自车;绿线表示自车的全局路径;蓝色矩形表示轨迹自车;道路上的红、黄、绿和黑色凸多边形表示观测对象(车辆、行人或未知)。在这些观测对象中,红、黄、绿色的凸多边形表示相关车辆。黑色的凸多边形表示非相关观测对象——这些是与自车无潜在碰撞可能的观测对象。相关车辆的颜色对应于该相关车辆的推断威胁等级:红色对应“危险”,黄色对应“注意”,绿色对应“安全”。位于相关车辆上方的彩色条表示对应三个预定义威胁等级的概率。每个观测对象上的箭头表示其航向。每个观测对象下方的白色信息显示其轨迹ID和速度。右上角的每张图像代表自车的前视图。
1) 测试案例一:
测试案例一旨在测试自车能否安全汇入主路交通。测试案例一的自动驾驶实验结果如图5所示。在图5a中,自车行驶至T型交叉口,准备汇入主路交通。轨迹ID 143和195的推断威胁等级显示为“安全”。在图5b中,由于轨迹ID 143(其推断威胁等级为“注意”)在主路上快速接近,自车减速并在T型交叉口的停止线处停车,以避免与轨迹ID 143发生碰撞。在图5c中,自车在T型交叉口的停止线处停车,以避免与轨迹ID 143和93发生碰撞,它们的推断威胁等级分别为“危险”和“注意”。轨迹ID 143和93均属于第一推理代理。在图5d中,自车保持静止于T型交叉口的停止线处,直到第一推理代理和第二推理代理的推断威胁等级均显示为“安全”。此时,轨迹ID 143(其推断威胁等级为“安全”)因刚进入自车的全局路径而被分配给第二推理代理。分配给第一推理代理的轨迹ID 93的威胁等级仍为“危险”。在图5e中,由于轨迹ID 143和93的推断威胁等级均已显示为“安全”,自车现在可以汇入T型交叉口主路上的交通。轨迹ID 93现在被分配给第二推理代理。在图5f中,由于不再存在潜在威胁,自车汇入主路上的交通。
 轨迹ID 195和轨迹ID 143的威胁等级显示为“安全”;(b) 推断威胁等级为“注意”的轨迹ID 143从主路快速接近;(c) 轨迹ID 143和轨迹ID 93的威胁等级分别显示为“危险”和“注意”;(d) 推断威胁等级为“安全”的轨迹ID 143现在位于自车的全局路径上。轨迹ID 93的威胁等级显示为“危险”;(e) 轨迹ID 143和轨迹ID 93均出现在自车的全局路径上,且它们的推断威胁等级均显示为“安全”;以及 (f) 无进一步碰撞威胁。)
轨迹ID 195和轨迹ID 143的威胁等级显示为“安全”;(b) 推断威胁等级为“注意”的轨迹ID 143从主路快速接近;(c) 轨迹ID 143和轨迹ID 93的威胁等级分别显示为“危险”和“注意”;(d) 推断威胁等级为“安全”的轨迹ID 143现在位于自车的全局路径上。轨迹ID 93的威胁等级显示为“危险”;(e) 轨迹ID 143和轨迹ID 93均出现在自车的全局路径上,且它们的推断威胁等级均显示为“安全”;以及 (f) 无进一步碰撞威胁。)
2) 测试案例II:
测试案例II旨在验证当另一车辆汇入主路交通流时,自车是否能够安全地沿主路行驶。图6展示了测试案例II的自动驾驶实验结果。在图6a中,自车减速至PCA,以避免与轨迹ID 247发生碰撞。轨迹ID 247的推断威胁等级为“危险”,正接近T型交叉口并准备汇入主路交通流。在图6b中,自车在保持与前车安全距离的同时减速,该前车的推断威胁等级为“危险”。在汇入主路交通流过程中,前车的轨迹ID编号已从247变为4。在图6c中,由于前车(轨迹ID 4)被推断为“安全”,自车加速通过T型交叉口。
 推断威胁等级为“危险”的轨迹ID 247接近T型交叉口以汇入主路;(b) 在汇入主路交通流过程中,轨迹ID 247的轨迹ID编号已更改为4。轨迹ID 4的威胁等级显示为“危险”;以及 (c) 作为前车的轨迹ID 4,其威胁等级显示为“安全”。)
推断威胁等级为“危险”的轨迹ID 247接近T型交叉口以汇入主路;(b) 在汇入主路交通流过程中,轨迹ID 247的轨迹ID编号已更改为4。轨迹ID 4的威胁等级显示为“危险”;以及 (c) 作为前车的轨迹ID 4,其威胁等级显示为“安全”。)
B. 定量分析
图7a和图7b所示的曲线分别展示了在不确定且不完整的噪声数据条件下,针对测试用例II,第一和第二推理代理的可靠且稳健估计的推理结果的定量结果。
在图7a和图7b中,前三个图表展示了交通情况,最后两个图分别展示了关于每个威胁等级的概率以及稳健推断的威胁等级的概率推理结果。
实验过程中,经常会出现不确定和不完整的噪声数据,如图7a和图7b中前三个图所示。此外,在汇入主路交通流期间,轨迹ID 247的轨迹ID编号已变更为4。换句话说,轨迹ID 247被遗漏了,这被视为一种假阴性情况。尽管所提出的算法已考虑了数据的不确定性,但这些不完整噪声数据仍会影响每个推理代理对应的威胁等级概率。然而,通过在时间窗口范围内滤除不完整的威胁等级概率,推断威胁等级得以稳健地确定。
 不确定且不完整的噪声数据下第一推理代理的推理结果;(b) 不确定且不完整的噪声数据下第二推理代理的推理结果。)
不确定且不完整的噪声数据下第一推理代理的推理结果;(b) 不确定且不完整的噪声数据下第二推理代理的推理结果。)
五、结论
本文提出了一种用于无信号T型交叉口自动驾驶的碰撞概率威胁评估算法,该算法能够对无信号T型交叉口的交通状况进行可靠且鲁棒的评估,以确保自动驾驶车辆(AV)安全通过无信号T型交叉口。所提出的算法通过将观测到的车辆投影到详细数字地图上,在车道级预测无信号T型交叉口附近所有观测车辆的所有未来路径,并利用预测的未来路径识别相关车辆(即在当前无信号T型交叉口交通状况下的潜在威胁)。接着,算法为每个相关车辆建立车与车之间的碰撞关系,并通过贝叶斯网络和时间窗口滤波方法评估每个相关车辆发生碰撞的可能性。
本文的主要贡献在于,所提出的算法能够通过贝叶斯网络和时间窗口滤波,在存在不确定且不完整的噪声数据的情况下,仍可靠且鲁棒地评估相关车辆发生碰撞的可能性。
正如实验结果所示,所提出的算法在无信号T型交叉口自动驾驶的碰撞威胁评估方面,具有可靠的性能,表现出良好的可靠性与鲁棒性。
未来工作的下一步重大进展是在即将解决相关法律和保险问题后,在真实交通条件下验证所提出的算法在无信号T型交叉口的应用效果。此外,通过整合驾驶员意图估计以更好地理解交通状况,将提升碰撞威胁评估的性能。


















 93
93

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









