






(1)进程与线程
(一)进程是程序在操作系统中的一次执行过程。系统进行资源分配和调度的一个独立单位。
(二) 线程是进程的一个执行实体,是CPU调度与分配的基本单位,它是比进程更小的能独立运行的基本单位。
(三) 一个进程可以创建和撤销多个进程,同一个进程中的多个线程可以并发执行。
(2) 单线程与多线程
进程 ——》 一个进程 ——》单线程程序
进程——》 多个进程 ——》 多线程程序
(3) 并发与并行
(一) 多线程程序在一个核的CPU上运行,就是并发
(二) 多线程程序在多个核的CPU上运行,就是并行
如图:

并发在任一时刻只有一个在工作,并行是都在工作。
(4)协程与线程
(一) 协程:独立的栈空间,共享堆空间,调度由用户自己控制,本质上有点类型于用户级线程,这些用户级线程的调度也是自己实现的。
(二)线程:一个线程可以跑多个协程,协程是轻量级线程。
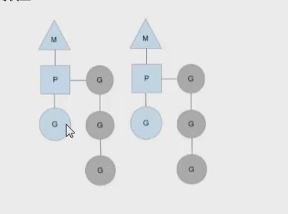
(5)golang里面goroutine 调度模型

M: 操作系统里面的线程
P:上下文
G: goroutine


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









