




 本文介绍了如何使用CocoaPods来管理Objective-C项目的依赖。通过简单的步骤指导读者完成CocoaPods的安装与配置,并展示了如何通过Podfile文件添加第三方库。
本文介绍了如何使用CocoaPods来管理Objective-C项目的依赖。通过简单的步骤指导读者完成CocoaPods的安装与配置,并展示了如何通过Podfile文件添加第三方库。
在更新gems的时候,抽空贡献一片短文。
cocoapods 是我从华少(@huacnlee) twitter 上了解到的工具,用来安装objc开发包用的。
做一个简单的类比,cocoapods 对于 objc 就如同
- npm 对 node.js
- gem 对 ruby
- maven/ivy 对 java
需求
- MacOS 系统
- Ruby/gems
- XCode/Command line tools
安装
sudo gem install cocoapods podsetup
如果安装出错,尝试使用macos自带的ruby版本。我安装的时候碰到版本问题。
rvm list rvm use system ruby -v #=> 1.8.7
使用
1. 使用XCode创建工程
2. 在工程目录下创建 Podfile 文件(类似ruby的Gemfile),在其中添加依赖描述:
platform :ios pod 'socket.IO', '~> 0.3.2'
3. 安装依赖:
pod install
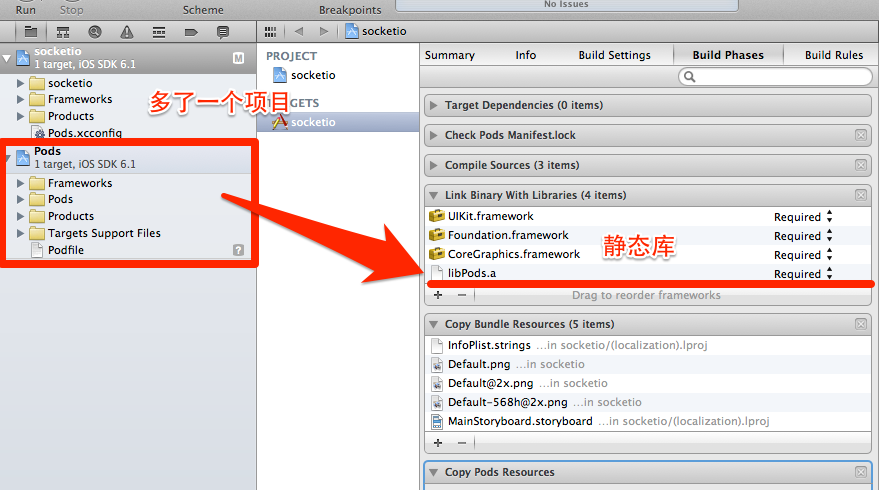
此时,pod会根据当前项目创建一个workspace,之后我需要以workspace的方式打开工程。
open AppName.xcworkspace
需要更多lib, 可以从这里查找

















 209
209

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









