



 本文探讨了链夹式烟苗注水移栽机的整体设计,重点在于投苗机构的零速投苗技术,涉及喂苗机构、投苗机构、机架和传动系统的详细设计,以及关键部件如苗夹、开沟器和限位导轨的工作原理。动力学分析确保机械运行效率和烟苗移栽质量。
本文探讨了链夹式烟苗注水移栽机的整体设计,重点在于投苗机构的零速投苗技术,涉及喂苗机构、投苗机构、机架和传动系统的详细设计,以及关键部件如苗夹、开沟器和限位导轨的工作原理。动力学分析确保机械运行效率和烟苗移栽质量。
目 录
1 引言 1
1.1课题来源及研究的目的和意义 1
1.2农艺要求 1
1.3链夹式烟苗注水移栽机的发展现状 1
1.4研究内容 3
2 链夹式烟苗注水移栽机的设计方案 4
2.1链夹式烟苗注水移栽机总体方案设计思路 4
2.2链夹式烟苗注水移栽机工作原理 5
3 链夹式烟苗注水移栽机具体设计 6
3.1链夹式烟苗注水移栽机牵引力、牵引功率、悬挂力矩 6
3.2传动机构设计 6
3.3主要零部件的设计 9
4 投苗机构的动力学分析 15
4.1投苗输送链的运动特性分析 15
4.2投苗机构输送链张力 15
4.3苗夹动力学分析 18
5 轴的校核 20
5.1地轮传动轴的校核 20
5.2锥齿轮传动轴的校核 21
总 结 23
致 谢 24
参考文献 25
1.5研究内容
(1)链夹式烟苗注水移栽机的总体机构设计,包括四部分:喂苗机构、投苗机构、机架和传动系统。为了实现烟苗移栽时的零速投苗,根据工作原理设计合理的传动机构,并进行理论计算。
(2)链夹式烟苗注水移栽机主要零部件的设计,如苗夹、开沟器、投苗链条限位导轨、夹紧导轨。
(3)对于链夹式烟苗注水移栽机的投苗机构进行动力学分析,如投苗输送链、苗夹等,保证机构设计的合理性。
第二章 链夹式烟苗注水移栽机的设计方案
2.1链夹式烟苗注水移栽机总体方案设计思路
本课题研究的重点是投苗机构:主要问题是“零速投苗”。对于烟苗特殊的要求:高直立性、小株距、覆土深等,设计了链夹式烟苗注水移栽机,包括四部分:喂苗机构、投苗机构、机架和传动系统。
(1)喂苗机构:该机构主要部分是输送带和苗槽,输送带根据移栽作业要求设计合理,苗槽安装在输送带上,烟苗移栽的株距等于苗槽之间的距离。该装置主要起到一个衔接作用,操作人员将盛放在苗箱中的裸烟苗一棵一棵放入每个苗槽之中,烟苗随着苗槽由水平转为竖直运动,到达合适位置后,被安装在投苗机构的苗夹夹取。
(2) 投苗机构:该机构主要包括限位导轨、夹紧导轨、苗夹和输送链。苗夹安装在输送链的每个链节上,其间距等于苗槽的间距即烟苗株距,限位导轨主要对链条摆动起到限制作用。夹紧导轨主要控制苗夹的开闭,通过两导轨之间的距离来实现苗夹进入夹紧导轨后逐渐闭合,夹紧烟苗,然后在合适的位置逐渐打开完成投苗。夹紧导轨使苗夹逐渐闭合,是为了避免烟苗被夹取时造成的损伤,同时也减小了由于突变引起的机构运动冲击。
通过对喂苗机构和投苗机构的合理设计和安装,实现苗夹在竖直方向与对应的苗槽高度一致,保证准确夹取苗槽中的烟苗;在喂苗机构、投苗机构和拖拉机之间通过合理的传动方案,实现苗夹和苗槽在竖直方向运动的同步,以及苗夹在作水平方向运动时速度与链夹式烟苗注水移栽机前进的速度大小相等、方向相反,实现零速投苗。操作人员向苗槽放苗是在苗槽的水平运动段,随即苗槽转为竖直运动,当烟苗随着苗槽转为竖直运动后,相应的苗夹也进入竖直轨道,在适当位置,苗夹逐渐夹紧,夹住对应苗槽中的烟苗。喂苗机构和投苗机构继续运动,当苗槽的运动方向偏离竖直运动时,烟苗和苗槽分离。苗夹随投苗输送链继续运动,当苗夹转过后,转为水平运动,其速度与链夹式烟苗注水移栽机前进的速度大小相等、方向相反,实现在一段时间内的烟苗相对于地面速度为零,在这期间完成对烟苗的覆土和镇压,之后苗夹在夹紧导轨的控制下,逐渐打开放开烟苗。由于苗夹作水平运动有一个时间段,覆土镇压装置有充分时间在烟苗相对地面速度为零的情况下对烟苗覆土压实,因此移栽后的烟苗直立性好、株距均匀等。
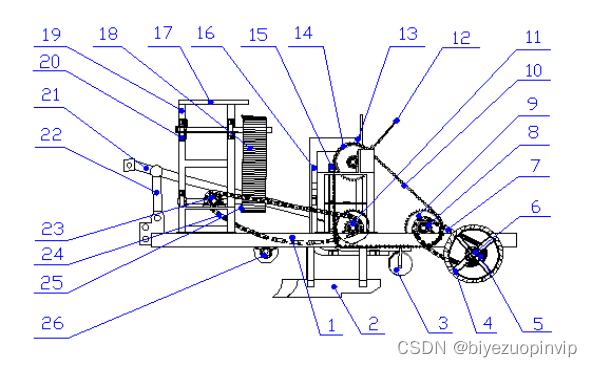
1.机架Ⅰ 2.开沟器 3.覆土镇压轮 4.地轮 5.轴承UCP211 6.第一传动链轮 7.第一传动链 8.第二传动链轮 9.第一投苗机构链轮 10.投苗输送链 11.第三传动链轮 12.苗夹 13.机架Ⅱ 14.第二投苗机构链轮 15.限位导轨 16.夹紧导轨 17.放置苗箱板 18.苗槽 19.机架Ⅲ 20.轴承UCP208 21.中间悬挂支架 22.左悬挂支架 23.锥齿轮 24.第二传动链 25.喂苗输送带 26.张紧装置
图2-1 链夹式烟苗注水移栽机示意图




























 503
503

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









