




 本文通过实测评估了AD9361零中频芯片的抗阻塞能力,在未加预选器的情况下,发现-2dBm的带外干扰即可导致接收信号强度下降6dB,但仍保持较好的动态范围。
本文通过实测评估了AD9361零中频芯片的抗阻塞能力,在未加预选器的情况下,发现-2dBm的带外干扰即可导致接收信号强度下降6dB,但仍保持较好的动态范围。
转自科创论坛,虎哥 https://www.kechuang.org/t/82167
在窄带应用中,零中频软件无线电芯片已经非常流行,其代表是ADI公司的AD9361。这里说的窄带应用,是指它的调谐带宽比较窄,比如工作在700-1200MHz范围。如果工作在宽带应用中——比如手持式宽带接收机,就要求频率范围覆盖50M-6GHz。在这么宽的范围内,如果不做复杂的预选,实际性能怎么样呢?以前听一位大师说,一塌糊涂,坑多得很,不但容易死,假信号还多,所以我就望而却步,老老实实做多次变频超外差+数字DDC方案。毕竟作为仪器级应用,是一贯不屑这种零中频方案的。
最近呢,我们需要做一个有gan意huai思shi的宽带产品。由于成本捉急,于是忽然觉得应该亲自检验一下这东西是不是真的如一些大师们所不屑的样子,要是万一能用,岂不省事了。
这里就开一个帖子,以AD9361为例,来探讨零中频接收机的一些简单性能问题。水平有限,而且也仅仅需要大概了解,所以不甚规范,就当闲聊,欢迎吐槽,挑刺则打屁股。
第一个实测,是关于抗阻塞能力的。这是担心比较多的指标。
测试方案:
定义:一个接收机在A频率接收信号,在带外的B频率有一强干扰也进入接收机。当干扰B的强度很强,以至于该接收机对信号A的接收能力下降6dB(下降1倍),则信号B的强度为该接收机的阻塞电平。
室外天线经机械衰减器、合路器进AD9361,强信号源也经过同一个合路器进9361,不断增加强信号源的输出电平,测量AD9361阻塞时的电平值。AD9361的板子是BA3CE生产的B210兼容板。
由于合路器、电缆等存在损耗,在测试前要对进入到测试电路板的信号(干扰)强度进行校准。如果需要测试多个频率,每次更换频率需要重新校准。理论上对AD9361的采样也要进行幅度校准,但实际上挺准的。由于接受能力下降是相对值,所以不用对AD9361测定的绝对电平进行校准。
需要仪器:步进衰减器、信号源、频谱仪或测试接收机、合路器、必要的连接电缆。
频谱仪用来校准到达测试电路板的B信号(由信号源产生)强度。
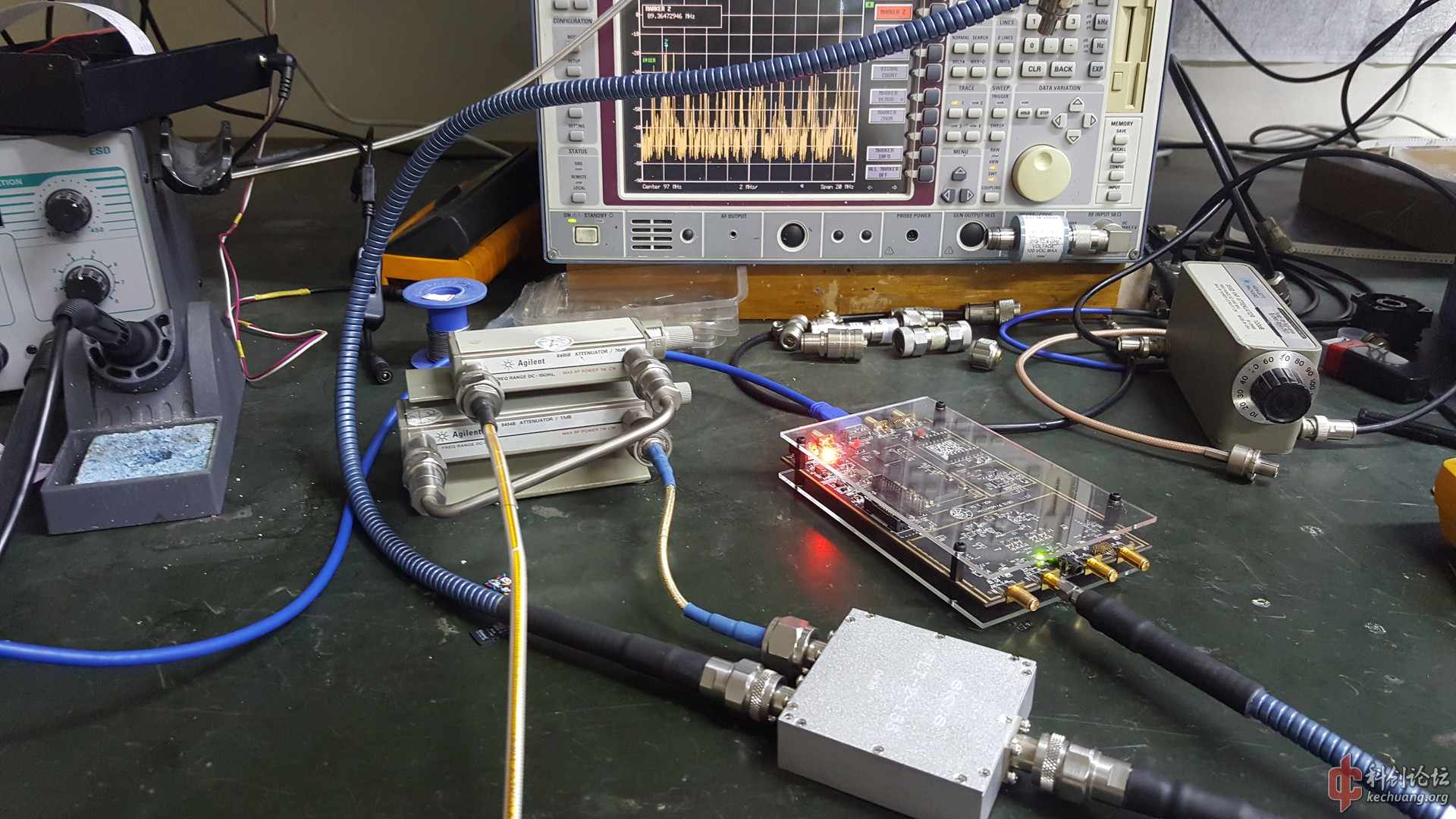
测试中没有刻意拍照,随便放几张。
这是连线方式,银白色浓浓中国风的东西是合路器。从上方进入视野的蓝色铠装线接的信号源,接衰减器的金黄色线连接着室外天线。
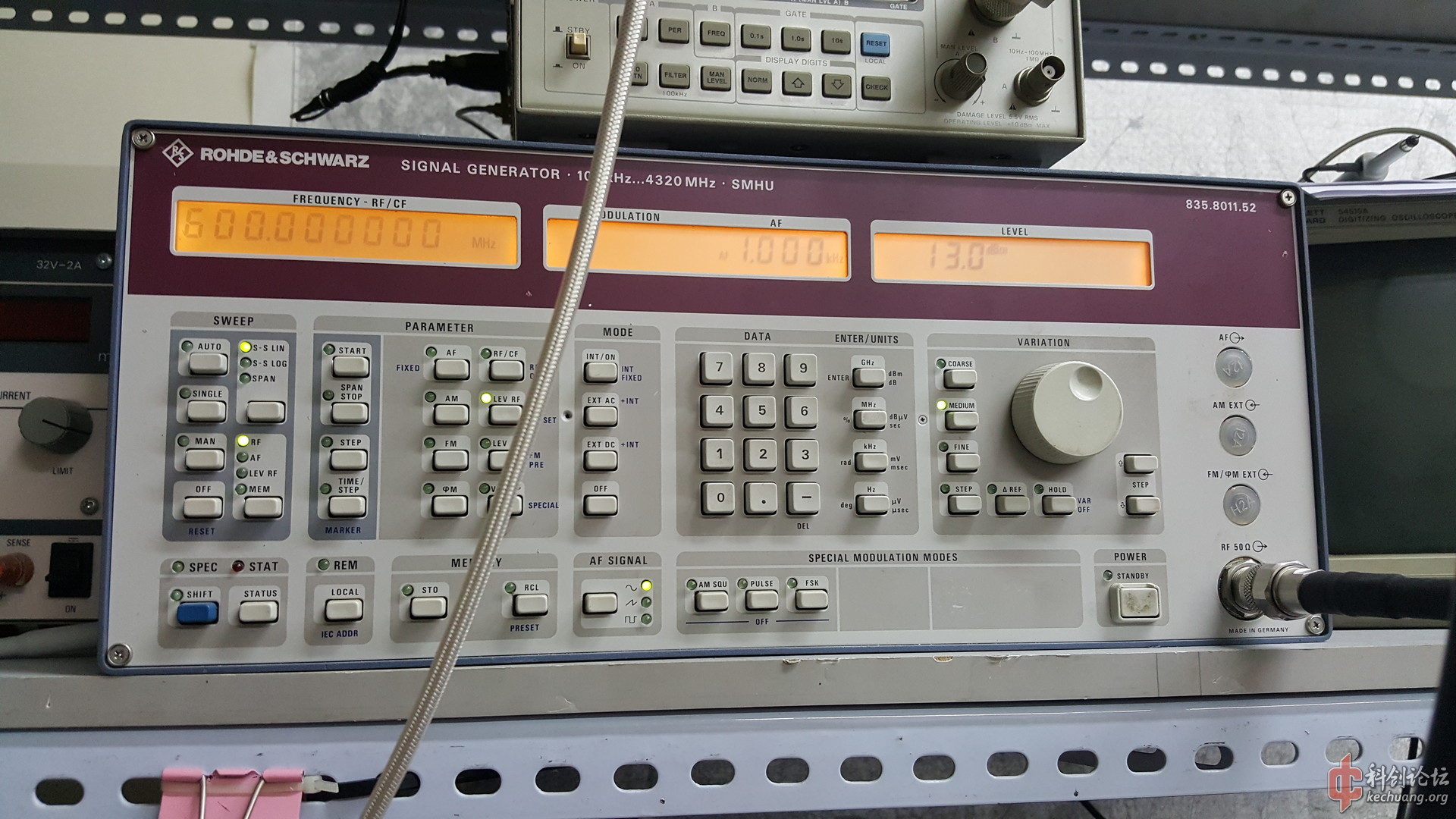
依然用的这个信号源
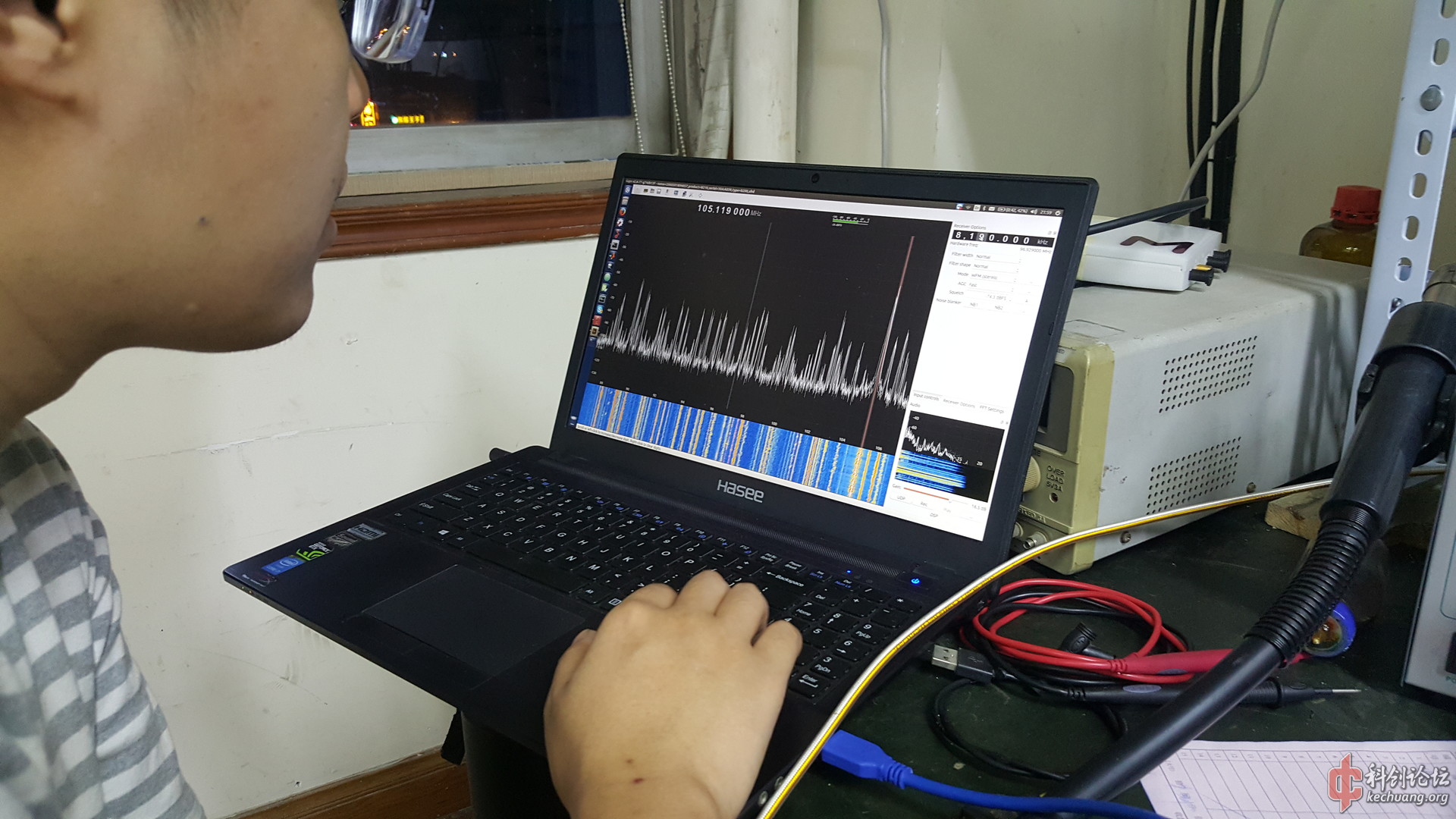
用一个SDR软件来显示频谱。warmonkey正在操作软件。
测试结果:
1、接上室外天线,衰减开到0dB,不论在软件设在哪个频率,9361明显过载,表现为噪底提升很多,假信号一大堆。不过这里是市中心而且靠近广播电台,过载情有可原。
2、衰减开至20dB方能完全消除过载。B210似乎没有把9361内置的过载报警数据送出来,需要人工判断。判断方法是,继续开大衰减,信号强度的变化量与增加的衰减量基本一致。
3、当设定B210接收FM广播时,在3GHz以下的任意频率(我们随机选取了几个测试),只要注入-2dBm的干扰,即可使收到的广播信号在FFT结果中的强度减小6dB。此时增益已经调得最低,且没有任何前置放大器。如果提高增益,阻塞性能必然下降,不过这次没有仔细测试。
4、不论是弱信号还是强信号,受到阻塞干扰时,减小的趋势相同。
5、保持B210设置和上述测试中的设置相同,此时底噪约为-105dBm。
结果解释:
通俗的讲,随便找个频率发射干扰,只要漏进接收端口的强度达到-2dBm,AD9361的灵敏度就会下降6dB。如果不加预选器,的确很容易被阻塞。
其实,-2dBm已经是一个不错的指标,且此时FFT图还能保持约90dB的动态范围(实际 100dB,但稍有压缩),性能也是不错的。虽然有一些不尽人意的地方,但也没有想象中那么糟糕。

















 2354
2354

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









