




 文章介绍了STM32如何通过串口向ROS发送和接收数据,包括发送数据的打包过程,如帧头帧尾、数据校验位的计算,以及浮点数到short型数据的转换。接收数据采用中断接收方式,并有帧头检测和数据校验。ROS控制优先级最高,10秒等待期后开始接收并处理数据。
文章介绍了STM32如何通过串口向ROS发送和接收数据,包括发送数据的打包过程,如帧头帧尾、数据校验位的计算,以及浮点数到short型数据的转换。接收数据采用中断接收方式,并有帧头检测和数据校验。ROS控制优先级最高,10秒等待期后开始接收并处理数据。
一、引言
马上要找工作了,因此总结一下之前做的项目里面涉及到的重要的知识点,经常使用到STM32与ROS之间的串口通信,串口通信必然涉及到发送和接收两个过程,下面详细讲解。
二、STM32向ROS发送数据
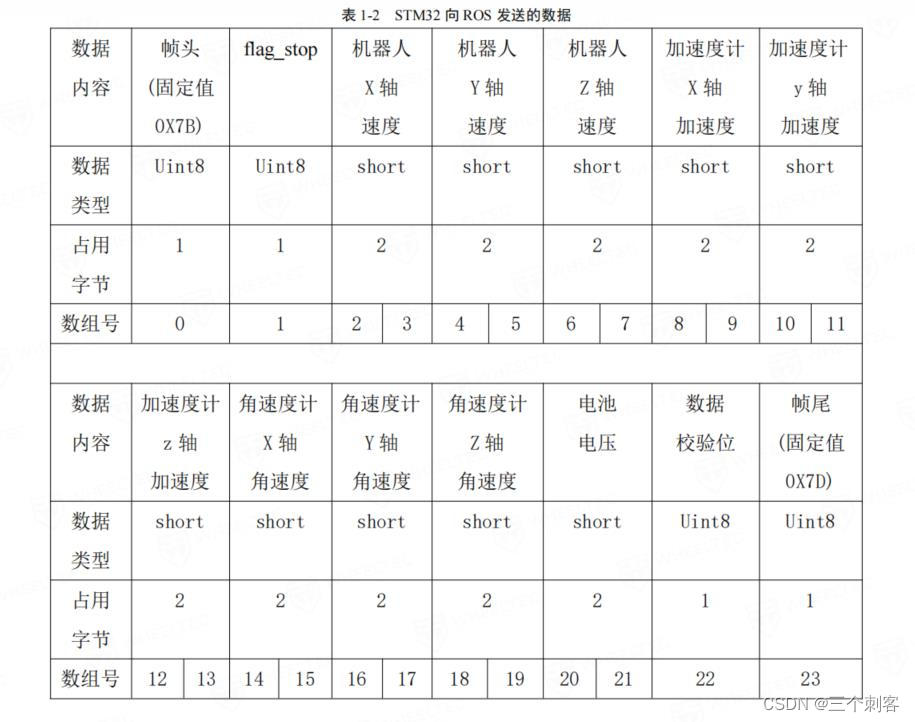
STM32向ROS发送数据使用一个date_task的任务按照20hz的频率执行。发送的数据包括:帧头帧尾、机器人使能标志位、机器人XYZ三轴速度、IMU三轴加速度、三轴角速度、电池电压、数据校验位,如下表所示
发送数据的方式:
将要发送的数据打包到一个数组中,数组的长度是24字节,使用串口逐位发送出去。因为串口一次只能发送一个8位(1个字节)的数据,因
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 798
798


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言








