




Redis是基于内存的,如果不想办法将数据保存在硬盘上,一旦Redis重启(退出/故障),内存的数据将会全部丢失。
- 我们肯定不想Redis里头的数据由于某些故障全部丢失(导致所有请求都走MySQL),即便发生了故障也希望可以将Redis原有的数据恢复过来,这就是持久化的作用。
Redis提供了两种不同的持久化方法来讲数据存储到硬盘里边:
-
RDB(基于快照),将某一时刻的所有数据保存到一个RDB文件中。
-
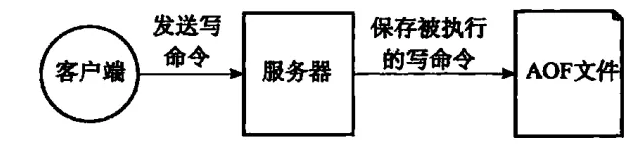
AOF(append-only-file),当Redis服务器执行写命令的时候,将执行的写命令保存到AOF文件中。
2.1RDB(快照持久化)
RDB持久化可以手动执行,也可以根据服务器配置定期执行。RDB持久化所生成的RDB文件是一个经过压缩的二进制文件,Redis可以通过这个文件还原数据库的数据。

有两个命令可以生成RDB文件:
-
SAVE会阻塞Redis服务器进程,服务器不能接收任何请求,直到RDB文件创建完毕为止。 -
BGSAVE创建出一个子进程,由子进程来负责创建RDB文件,服务器进程可以继续接收请求。
Redis服务器在启动的时候,如果发现有RDB文件,就会自动载入RDB文件(不需要人工干预)
- 服务器在载入RDB文件期间,会处于阻塞状态,直到载入工作完成。
除了手动调用SAVE或者BGSAVE命令生成RDB文件之外,我们可以使用配置的方式来定期执行:
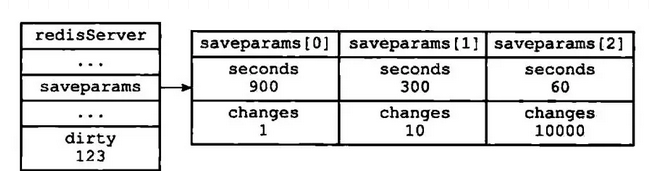
在默认的配置下,如果以下的条件被触发,就会执行BGSAVE命令
save 900 1 #在900秒(15分钟)之后,至少有1个key发生变化,
save 300 10 #在300秒(5分钟)之后,至少有10个key发生变化
save 60 10000 #在60秒(1分钟)之后,至少有10000个key发生变化
原理大概就是这样子的(结合上面的配置来看):
struct redisServer{
// 修改计数器
long long dirty;
// 上一次执行保存的时间
time_t lastsave;
// 参数的配置
struct saveparam *saveparams;
};
遍历参数数组,判断修改次数和时间是否符合,如果符合则调用besave()来生成RDB文件
总结:通过手动调用SAVE或者BGSAVE命令或者配置条件触发,将数据库某一时刻的数据快照,生成RDB文件实现持久化。
2.2AOF(文件追加)
上面已经介绍了RDB持久化是通过将某一时刻数据库的数据“快照”来实现的,下面我们来看看AOF是怎么实现的。
- AOF是通过保存Redis服务器所执行的写命令来记录数据库的数据的。
比如说我们对空白的数据库执行以下写命令:
redis> SET meg "hello"
OK
redis> SADD fruits "apple" "banana" "cherry"
(integer) 3
redis> RPUSH numbers 128 256 512
(integer) 3
Redis会产生以下内容的AOF文件:

这些都是以Redis的命令请求协议格式保存的。Redis协议规范(RESP)参考资料:
- https://www.cnblogs.com/tommy-huang/p/6051577.html
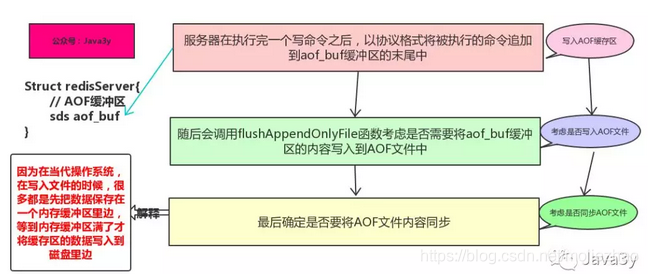
AOF持久化功能的实现可以分为3个步骤:
-
命令追加:命令写入aof_buf缓冲区
-
文件写入:调用flushAppendOnlyFile函数,考虑是否要将aof_buf缓冲区写入AOF文件中
-
文件同步:考虑是否将内存缓冲区的数据真正写入到硬盘
flushAppendOnlyFile函数的行为由服务器配置的appendfsyn选项来决定的:
appendfsync always # 每次有数据修改发生时都会写入AOF文件。
appendfsync everysec # 每秒钟同步一次,该策略为AOF的默认策略。
appendfsync no # 从不同步。高效但是数据不会被持久化。
从字面上应该就更好理解了,这里我就不细说了…
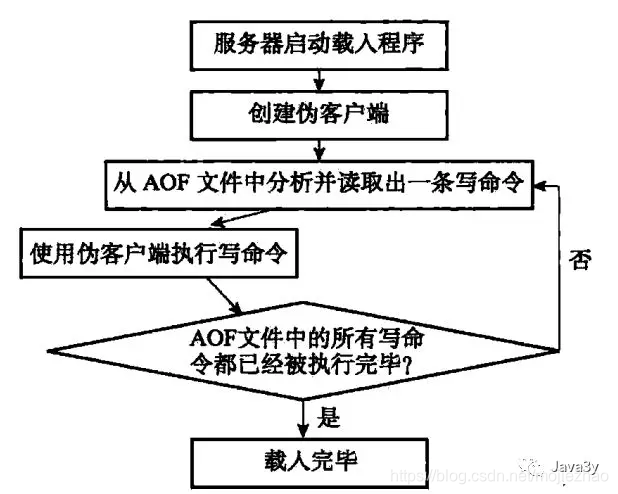
下面来看一下AOF是如何载入与数据还原的:
- 创建一个伪客户端(本地)来执行AOF的命令,直到AOF命令被全部执行完毕。
2.2.1AOF重写
从前面的示例看出,我们写了三条命令,AOF文件就保存了三条命令。如果我们的命令是这样子的:
redis > RPUSH list "Java" "3y"
(integer)2
redis > RPUSH list "Java3y"
integer(3)
redis > RPUSH list "yyy"
integer(4)
同样地,AOF也会保存3条命令。我们会发现一个问题:上面的命令是可以合并起来成为1条命令的,并不需要3条。这样就可以让AOF文件的体积变得更小。
AOF重写由Redis自行触发(参数配置),也可以用BGREWRITEAOF命令手动触发重写操作。
- 要值得说明的是:AOF重写不需要对现有的AOF文件进行任何的读取、分析。AOF重写是通过读取服务器当前数据库的数据来实现的!
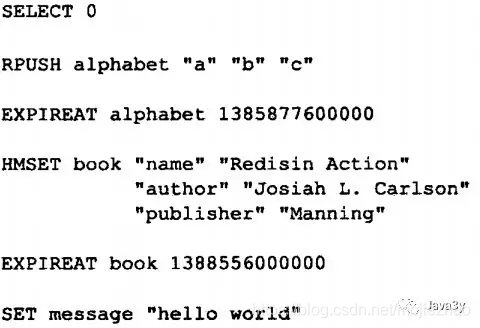
比如说现在有一个Redis数据库的数据如下:
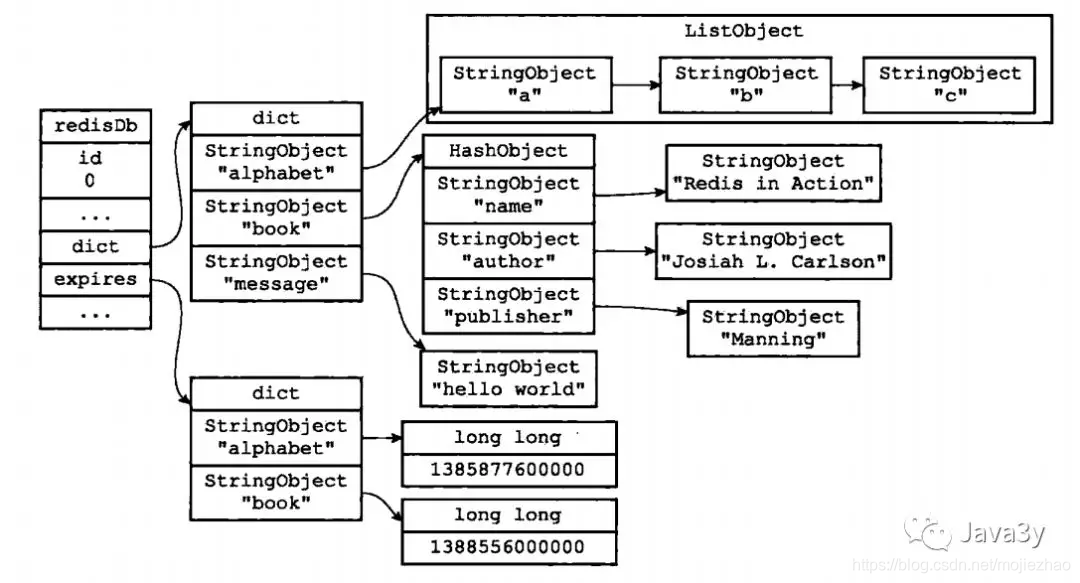
新的AOF文件的命令如下,没有一条是多余的!
2.2.2AOF后台重写
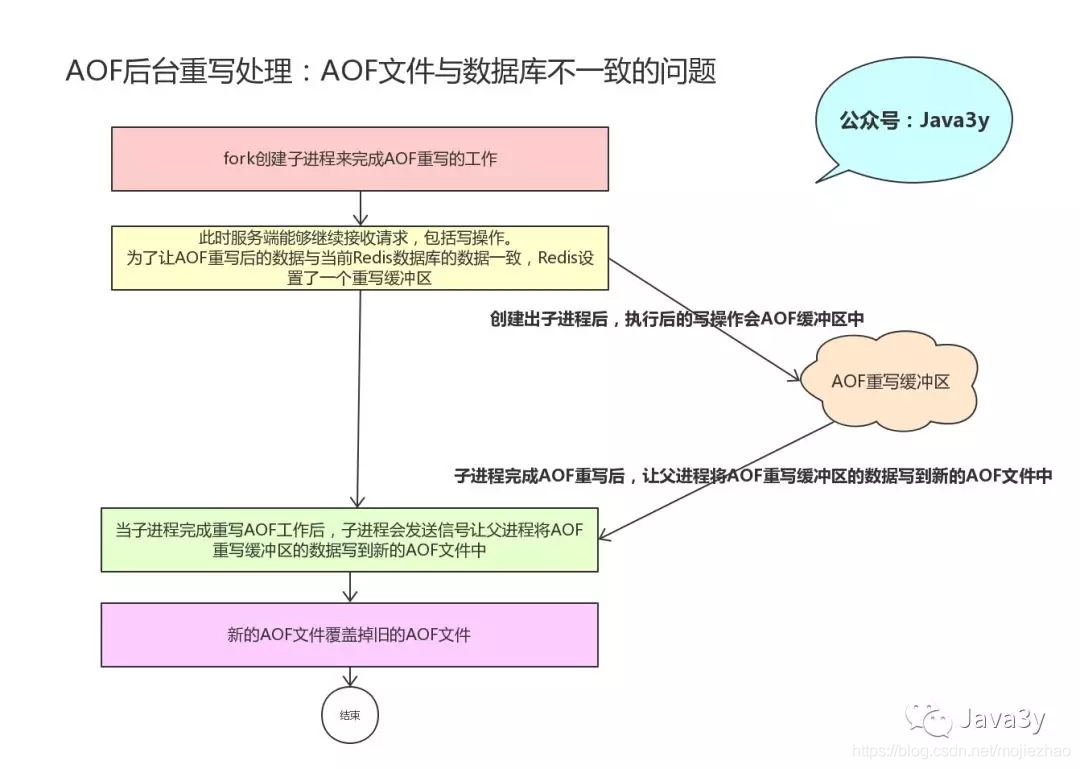
Redis将AOF重写程序放到子进程里执行(BGREWRITEAOF命令),像BGSAVE命令一样fork出一个子进程来完成重写AOF的操作,从而不会影响到主进程。
AOF后台重写是不会阻塞主进程接收请求的,新的写命令请求可能会导致当前数据库和重写后的AOF文件的数据不一致!
为了解决数据不一致的问题,Redis服务器设置了一个AOF重写缓冲区,这个缓存区会在服务器创建出子进程之后使用。
2.3RDB和AOF对过期键的策略
RDB持久化对过期键的策略:
-
执行SAVE或者BGSAVE命令创建出的RDB文件,程序会对数据库中的过期键检查,已过期的键不会保存在RDB文件中。
-
载入RDB文件时,程序同样会对RDB文件中的键进行检查,过期的键会被忽略。
RDB持久化对过期键的策略:
-
如果数据库的键已过期,但还没被惰性/定期删除,AOF文件不会因为这个过期键产生任何影响(也就说会保留),当过期的键被删除了以后,会追加一条DEL命令来显示记录该键被删除了
-
重写AOF文件时,程序会对RDB文件中的键进行检查,过期的键会被忽略。
复制模式:
- 主服务器来控制从服务器统一删除过期键(保证主从服务器数据的一致性)
2.4RDB和AOF用哪个?
RDB和AOF并不互斥,它俩可以同时使用。
-
RDB的优点:载入时恢复数据快、文件体积小。
-
RDB的缺点:会一定程度上丢失数据(因为系统一旦在定时持久化之前出现宕机现象,此前没有来得及写入磁盘的数据都将丢失。)
-
AOF的优点:丢失数据少(默认配置只丢失一秒的数据)。
-
AOF的缺点:恢复数据相对较慢,文件体积大
如果Redis服务器同时开启了RDB和AOF持久化,服务器会优先使用AOF文件来还原数据(因为AOF更新频率比RDB更新频率要高,还原的数据更完善)
可能涉及到RDB和AOF的配置:
redis持久化,两种方式
1、rdb快照方式
2、aof日志方式
----------rdb快照------------
save 900 1
save 300 10
save 60 10000
stop-writes-on-bgsave-error yes
rdbcompression yes
rdbchecksum yes
dbfilename dump.rdb
dir /var/rdb/
-----------Aof的配置-----------
appendonly no # 是否打开 aof日志功能
appendfsync always #每一个命令都立即同步到aof,安全速度慢
appendfsync everysec
appendfsync no 写入工作交给操作系统,由操作系统判断缓冲区大小,统一写入到aof 同步频率低,速度快
no-appendfsync-on-rewrite yes 正在导出rdb快照的时候不要写aof
auto-aof-rewrite-percentage 100
auto-aof-rewrite-min-size 64mb
./bin/redis-benchmark -n 20000
Redis实战总结-配置、持久化、复制
https://blog.youkuaiyun.com/guweiyu_thinker/article/details/78816071

















 1569
1569

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









