




 本文介绍了Zookeeper中四种节点类型,并详细阐述了如何利用临时顺序节点实现分布式锁,包括锁的获取与释放流程。同时对比了Zookeeper与Redis在分布式锁上的优缺点。
本文介绍了Zookeeper中四种节点类型,并详细阐述了如何利用临时顺序节点实现分布式锁,包括锁的获取与释放流程。同时对比了Zookeeper与Redis在分布式锁上的优缺点。
什么是临时顺序节点?
让我们来回顾一下Zookeeper节点的概念:
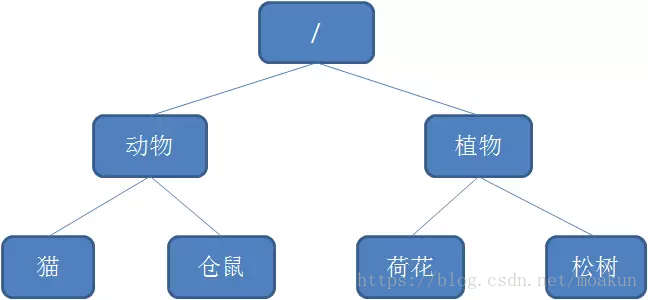
Zookeeper的数据存储结构就像一棵树,这棵树由节点组成,这种节点叫做Znode。
Znode分为四种类型:
1.持久节点 (PERSISTENT)
默认的节点类型。创建节点的客户端与zookeeper断开连接后,该节点依旧存在 。
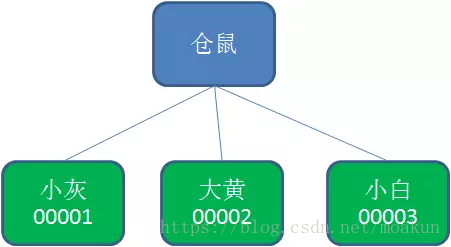
2.持久节点顺序节点(PERSISTENT_SEQUENTIAL)
所谓顺序节点,就是在创建节点时,Zookeeper根据创建的时间顺序给该节点名称进行编号:
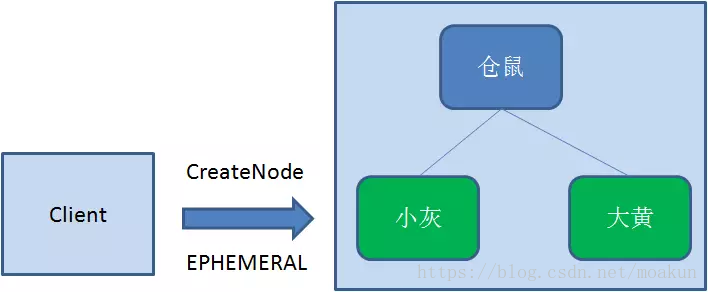
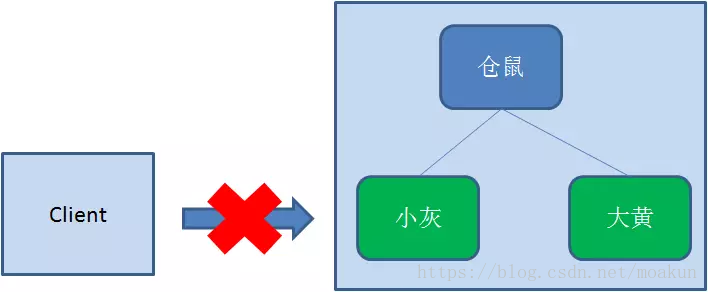
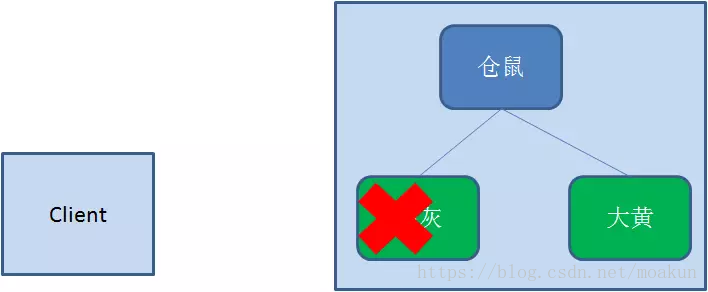
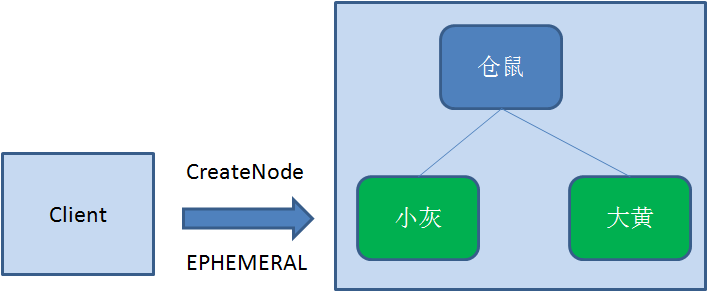
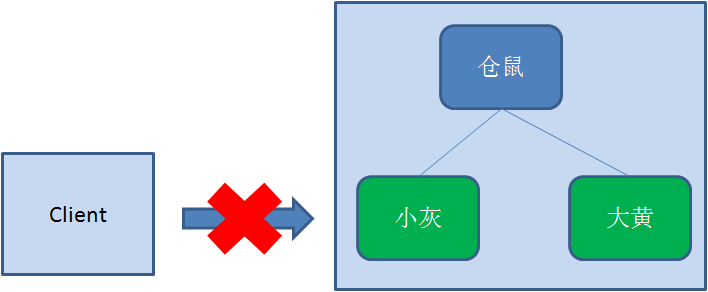
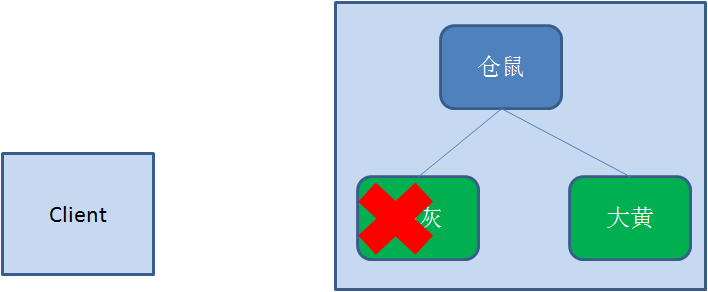
3.临时节点(EPHEMERAL)
和持久节点相反,当创建节点的客户端与zookeeper断开连接后,临时节点会被删除:
4.临时顺序节点(EPHEMERAL_SEQUENTIAL)
顾名思义,临时顺序节点结合和临时节点和顺序节点的特点:在创建节点时,Zookeeper根据创建的时间顺序给该节点名称进行编号;当创建节点的客户端与zookeeper断开连接后,临时节点会被删除。
Zookeeper分布式锁的原理
Zookeeper分布式锁恰恰应用了临时顺序节点。具体如何实现呢?让我们来看一看详细步骤:
获取锁
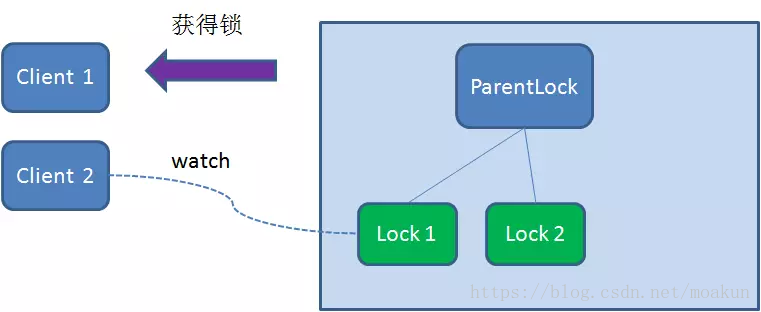
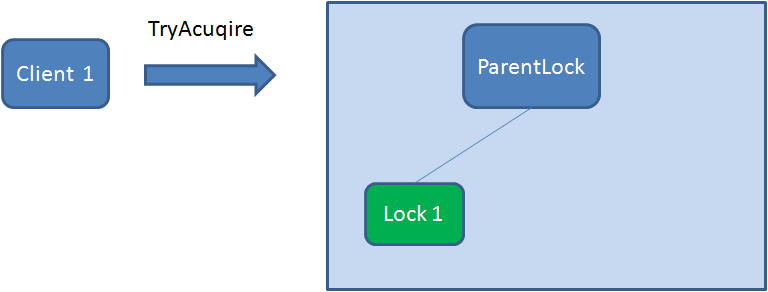
首先,在Zookeeper当中创建一个持久节点ParentLock。当第一个客户端想要获得锁时,需要在ParentLock这个节点下面创建一个临时顺序节点 Lock1。
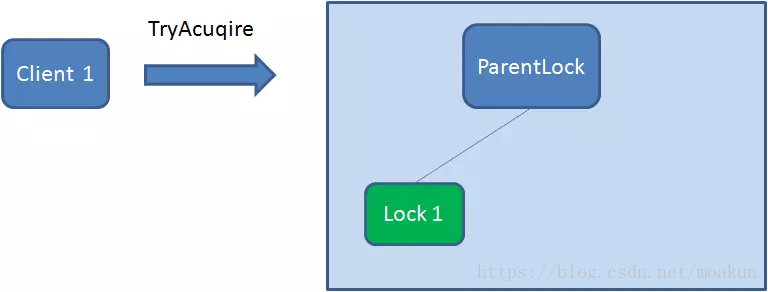
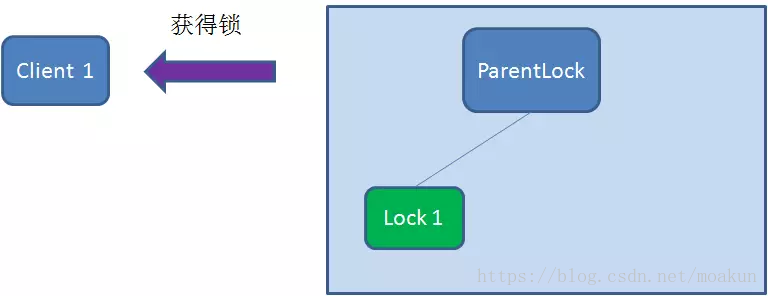
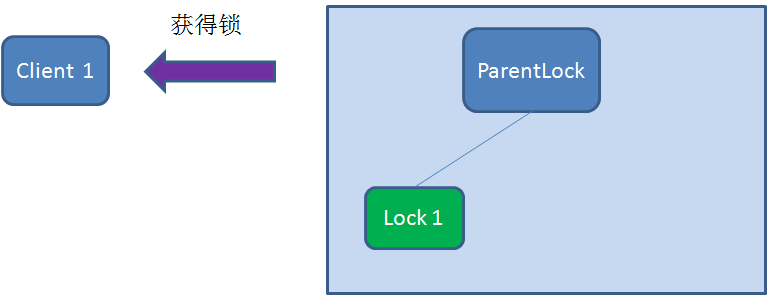
之后,Client1查找ParentLock下面所有的临时顺序节点并排序,判断自己所创建的节点Lock1是不是顺序最靠前的一个。如果是第一个节点,则成功获得锁。
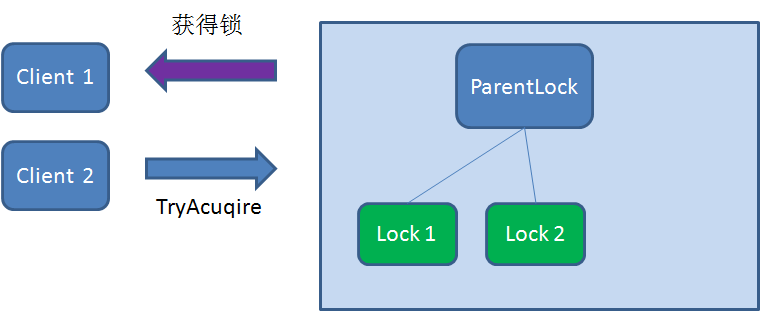
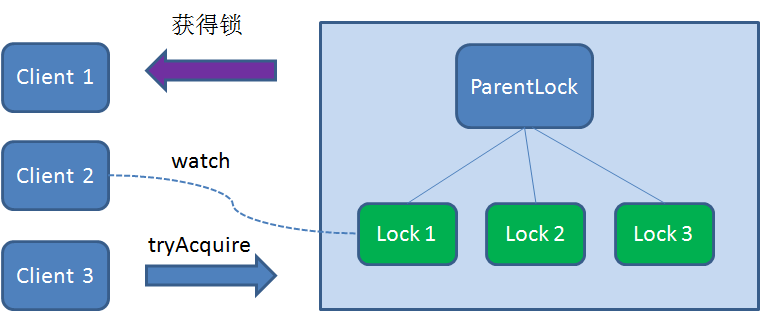
这时候,如果再有一个客户端 Client2 前来获取锁,则在ParentLock下载再创建一个临时顺序节点Lock2。
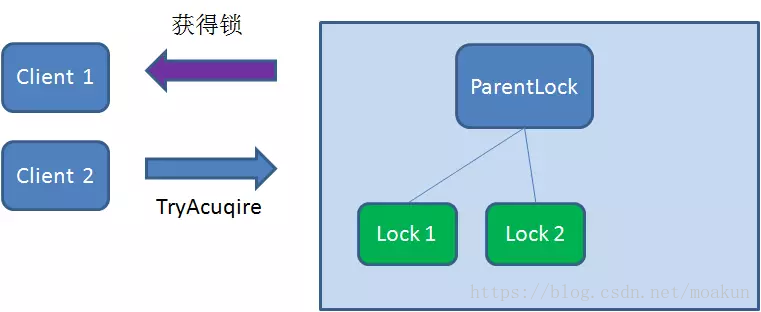
Client2查找ParentLock下面所有的临时顺序节点并排序,判断自己所创建的节点Lock2是不是顺序最靠前的一个,结果发现节点Lock2并不是最小的。
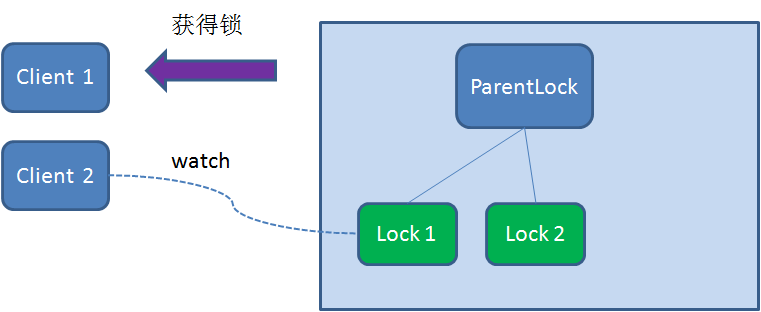
于是,Client2向排序仅比它靠前的节点Lock1注册Watcher,用于监听Lock1节点是否存在。这意味着Client2抢锁失败,进入了等待状态。
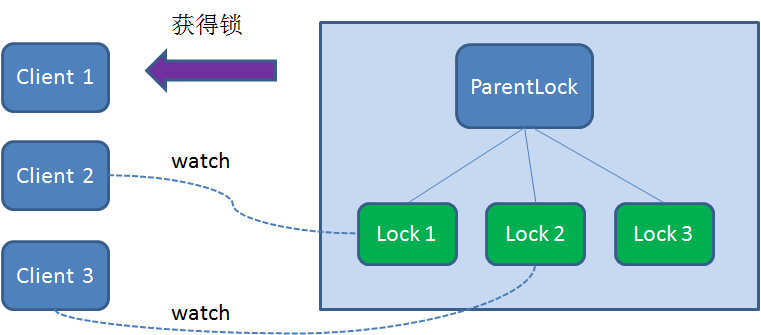
这时候,如果又有一个客户端Client3前来获取锁,则在ParentLock下载再创建一个临时顺序节点Lock3。
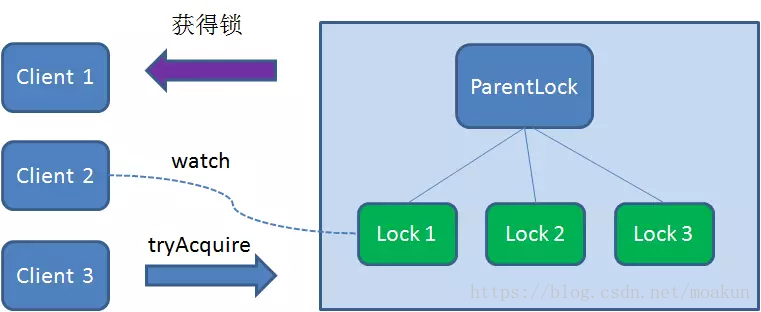
Client3查找ParentLock下面所有的临时顺序节点并排序,判断自己所创建的节点Lock3是不是顺序最靠前的一个,结果同样发现节点Lock3并不是最小的。
于是,Client3向排序仅比它靠前的节点Lock2注册Watcher,用于监听Lock2节点是否存在。这意味着Client3同样抢锁失败,进入了等待状态。
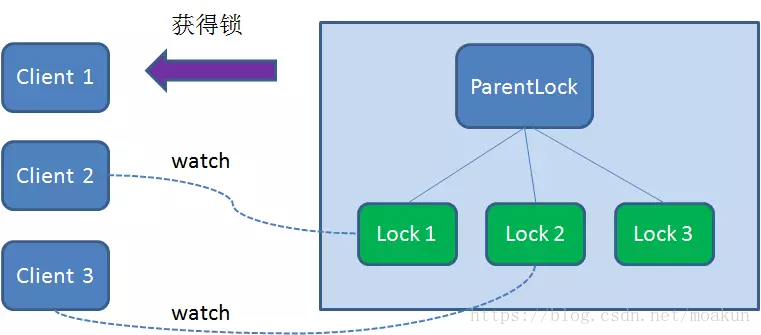
这样一来,Client1得到了锁,Client2监听了Lock1,Client3监听了Lock2。这恰恰形成了一个等待队列,很像是Java当中ReentrantLock所依赖的AQS(AbstractQueuedSynchronizer)。
释放锁
释放锁分为两种情况:
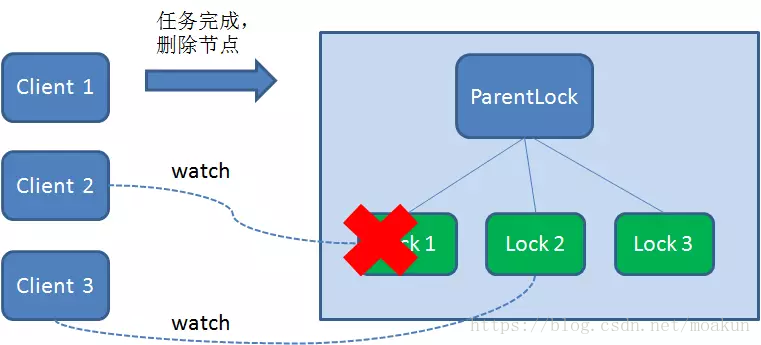
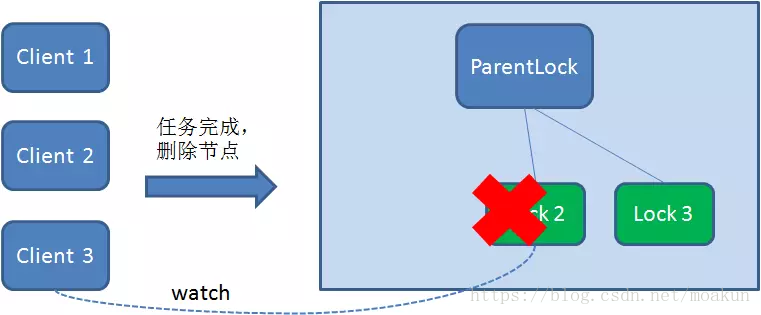
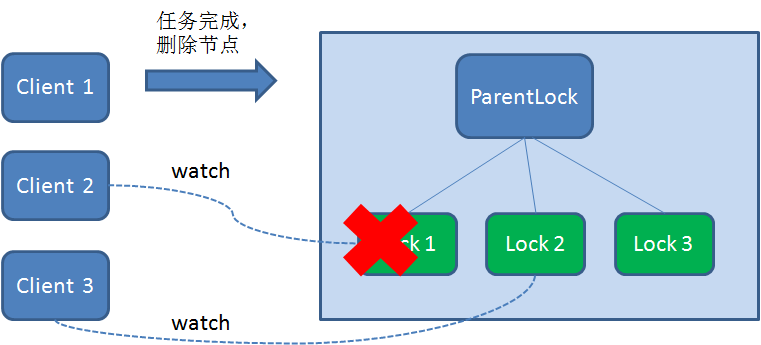
1.任务完成,客户端显示释放
当任务完成时,Client1会显示调用删除节点Lock1的指令。
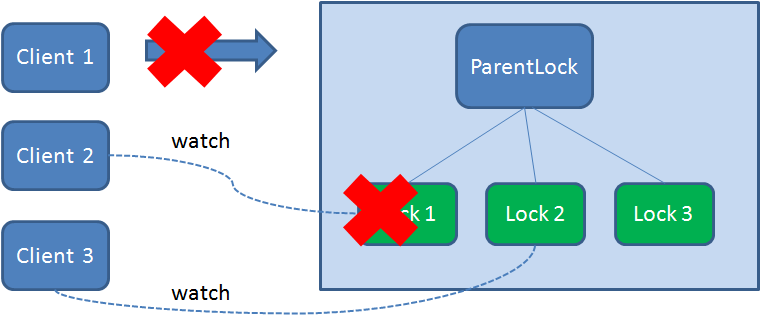
2.任务执行过程中,客户端崩溃
获得锁的Client1在任务执行过程中,如果Duang的一声崩溃,则会断开与Zookeeper服务端的链接。根据临时节点的特性,相关联的节点Lock1会随之自动删除。
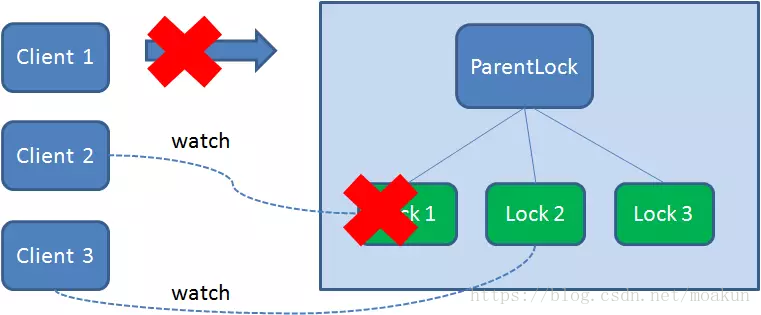
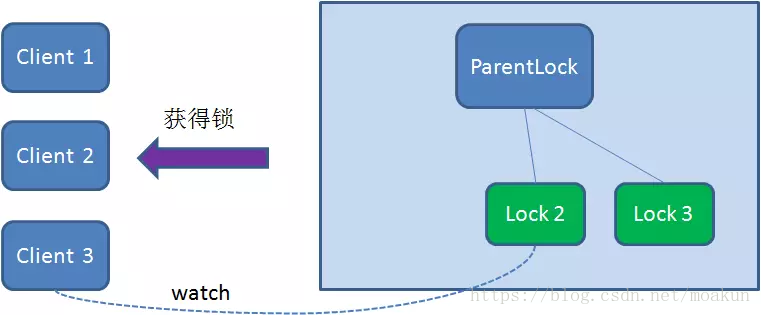
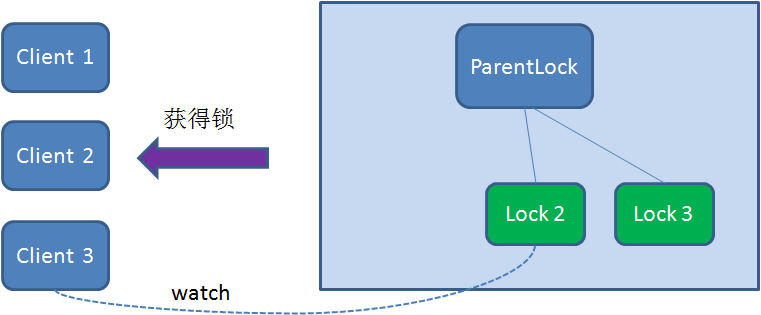
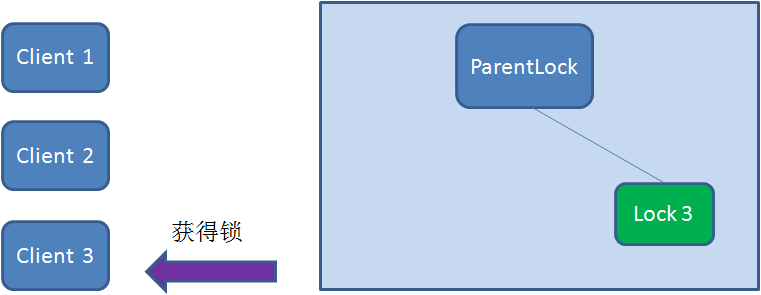
由于Client2一直监听着Lock1的存在状态,当Lock1节点被删除,Client2会立刻收到通知。这时候Client2会再次查询ParentLock下面的所有节点,确认自己创建的节点Lock2是不是目前最小的节点。如果是最小,则Client2顺理成章获得了锁。
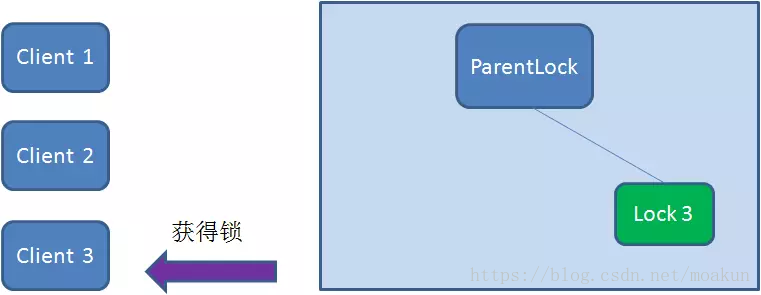
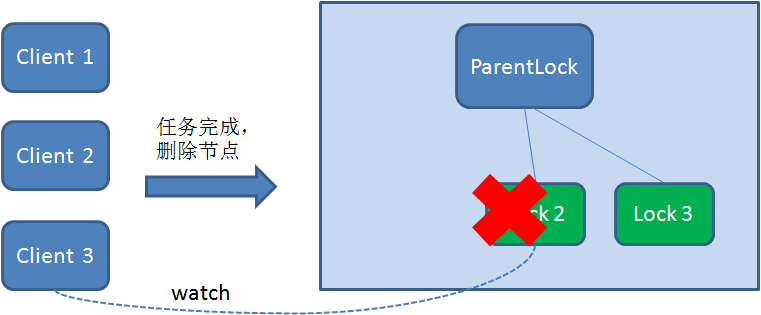
同理,如果Client2也因为任务完成或者节点崩溃而删除了节点Lock2,那么Client3就会接到通知。
最终,Client3成功得到了锁。


Zookeeper和Redis分布式锁的比较
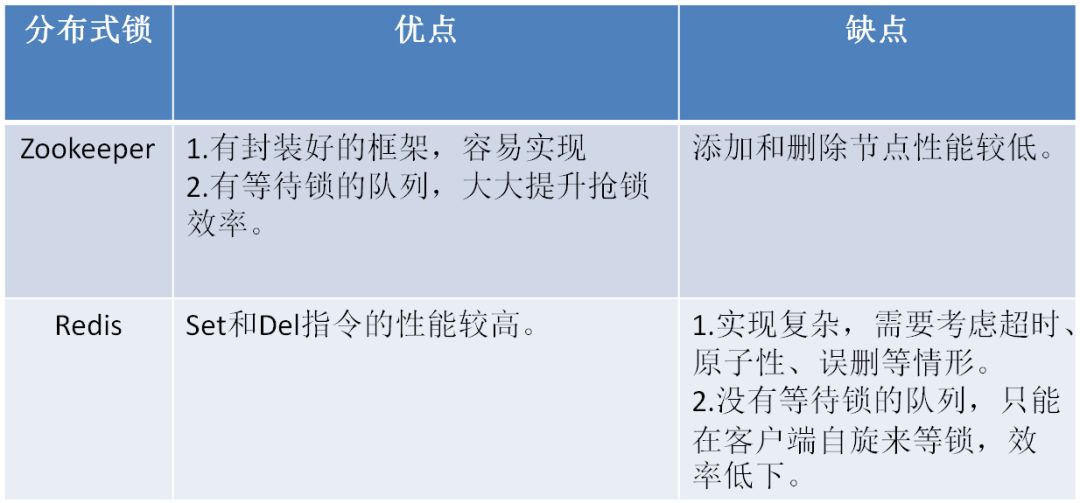
下面的表格总结了Zookeeper和Redis分布式锁的优缺点:
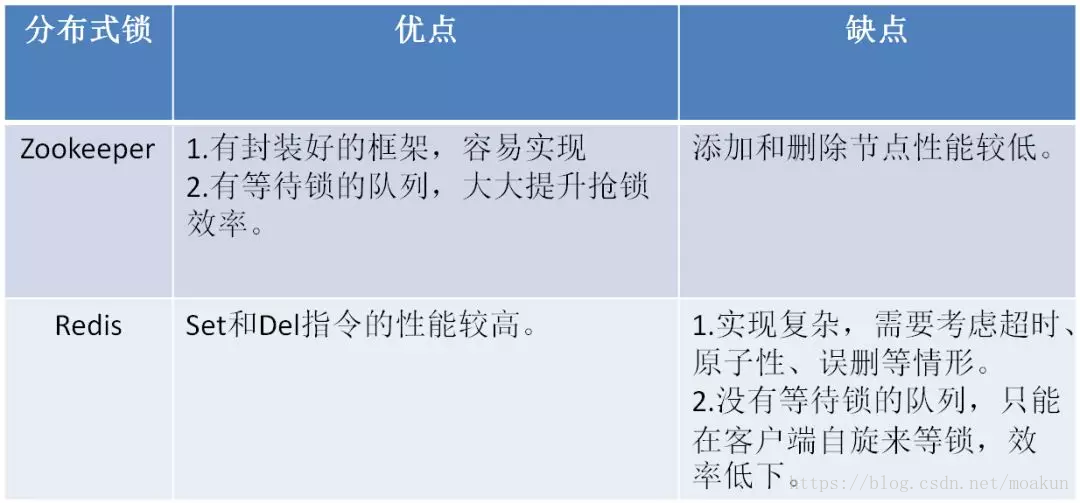
有人说Zookeeper实现的分布式锁支持可重入,Redis实现的分布式锁不支持可重入,这是错误的观点。两者都可以在客户端实现可重入逻辑。
在Apache的开源框架 Apache Curator 中,包含了对Zookeeper分布式锁的实现,有兴趣的小伙伴可以看看源码:
https://github.com/apache/curator/
什么是临时顺序节点?
让我们来回顾一下Zookeeper节点的概念:
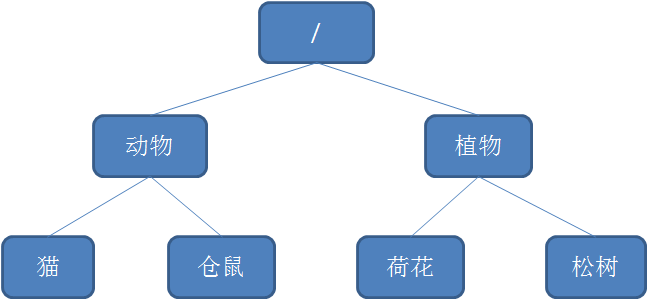
Zookeeper的数据存储结构就像一棵树,这棵树由节点组成,这种节点叫做Znode。
Znode分为四种类型:
1.持久节点 (PERSISTENT)
默认的节点类型。创建节点的客户端与zookeeper断开连接后,该节点依旧存在 。
2.持久节点顺序节点(PERSISTENT_SEQUENTIAL)
所谓顺序节点,就是在创建节点时,Zookeeper根据创建的时间顺序给该节点名称进行编号:
3.临时节点(EPHEMERAL)
和持久节点相反,当创建节点的客户端与zookeeper断开连接后,临时节点会被删除:
4.临时顺序节点(EPHEMERAL_SEQUENTIAL)
顾名思义,临时顺序节点结合和临时节点和顺序节点的特点:在创建节点时,Zookeeper根据创建的时间顺序给该节点名称进行编号;当创建节点的客户端与zookeeper断开连接后,临时节点会被删除。
Zookeeper分布式锁的原理
Zookeeper分布式锁恰恰应用了临时顺序节点。具体如何实现呢?让我们来看一看详细步骤:
获取锁
首先,在Zookeeper当中创建一个持久节点ParentLock。当第一个客户端想要获得锁时,需要在ParentLock这个节点下面创建一个临时顺序节点 Lock1。
之后,Client1查找ParentLock下面所有的临时顺序节点并排序,判断自己所创建的节点Lock1是不是顺序最靠前的一个。如果是第一个节点,则成功获得锁。
这时候,如果再有一个客户端 Client2 前来获取锁,则在ParentLock下载再创建一个临时顺序节点Lock2。
Client2查找ParentLock下面所有的临时顺序节点并排序,判断自己所创建的节点Lock2是不是顺序最靠前的一个,结果发现节点Lock2并不是最小的。
于是,Client2向排序仅比它靠前的节点Lock1注册Watcher,用于监听Lock1节点是否存在。这意味着Client2抢锁失败,进入了等待状态。
这时候,如果又有一个客户端Client3前来获取锁,则在ParentLock下载再创建一个临时顺序节点Lock3。
Client3查找ParentLock下面所有的临时顺序节点并排序,判断自己所创建的节点Lock3是不是顺序最靠前的一个,结果同样发现节点Lock3并不是最小的。
于是,Client3向排序仅比它靠前的节点Lock2注册Watcher,用于监听Lock2节点是否存在。这意味着Client3同样抢锁失败,进入了等待状态。
这样一来,Client1得到了锁,Client2监听了Lock1,Client3监听了Lock2。这恰恰形成了一个等待队列,很像是Java当中ReentrantLock所依赖的AQS(AbstractQueuedSynchronizer)。
释放锁
释放锁分为两种情况:
1.任务完成,客户端显示释放
当任务完成时,Client1会显示调用删除节点Lock1的指令。
2.任务执行过程中,客户端崩溃
获得锁的Client1在任务执行过程中,如果Duang的一声崩溃,则会断开与Zookeeper服务端的链接。根据临时节点的特性,相关联的节点Lock1会随之自动删除。
由于Client2一直监听着Lock1的存在状态,当Lock1节点被删除,Client2会立刻收到通知。这时候Client2会再次查询ParentLock下面的所有节点,确认自己创建的节点Lock2是不是目前最小的节点。如果是最小,则Client2顺理成章获得了锁。
同理,如果Client2也因为任务完成或者节点崩溃而删除了节点Lock2,那么Client3就会接到通知。
最终,Client3成功得到了锁。
Zookeeper和Redis分布式锁的比较
下面的表格总结了Zookeeper和Redis分布式锁的优缺点:
有人说Zookeeper实现的分布式锁支持可重入,Redis实现的分布式锁不支持可重入,这是错误的观点。两者都可以在客户端实现可重入逻辑。
在Apache的开源框架 Apache Curator 中,包含了对Zookeeper分布式锁的实现,有兴趣的小伙伴可以看看源码:
https://github.com/apache/curator/

















 596
596

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









