



维齐:一种用于辅助机器人技术的轮式人形机器人
摘要
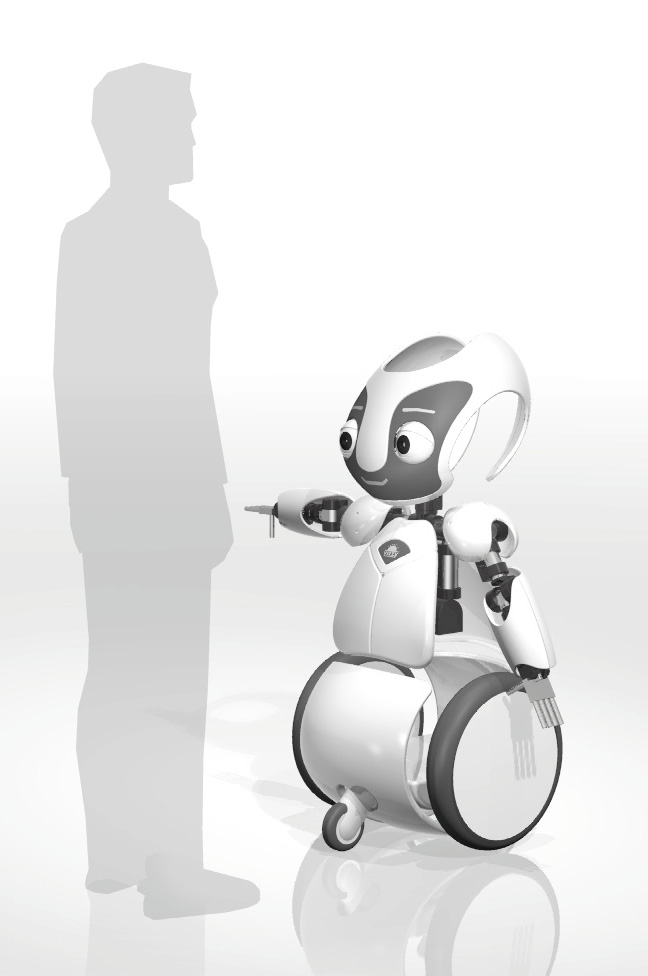
由于可能的应用领域多样,辅助机器人平台的开发带来了令人兴奋的工程和设计挑战。本文介绍了维齐,一种带有类人上躯干的轮式人形机器人,集成了便捷的移动性、抓取能力、类人视觉感知、眼球‐头部运动和手臂手势。其人形外观提高了用户接受度,并有助于人机交互。其下部的移动平台能够在室内和室外环境中自主导航。我们描述了维齐的需求、设计与构建,以及当前的认知能力和预期的应用领域。
Keywords 机器人设计 · Mechanical设计 · Humanoid机器人 · Mobile机器人
1 引言
人们对服务机器人在日常生活任务中辅助人类的兴趣日益增长,这推动了类人机器人在人机交互方面的研究。这是一个具有挑战性的目标,因为许多类人技术仍处于初级阶段,尤其是腿式移动技术。为解决这一问题,辅助机器人领域的趋势是采用移动底盘并结合更接近人类的上部躯干。
像滚动的贾斯汀 [5], 特温迪一号 [7], ARMAR III[2]以及用于iCub的iKart1 移动平台等机器人展示了研究方面的成果,而在商业方面,Pepper2 和 REEM3 等机器人正将这一研究领域推向市场。维齐属于这类具有类人上半身和类车下半身的机器人,旨在与人互动并协助人们完成日常任务(见图1)。与上述机器人相比,维齐具有更友好且有机的外观,并采用模块化方法指导其机械设计,从而便于生产、存储和组装。此外,头部和手臂运动控制器生成的轨迹借鉴了人类的运动特征[11]。本文将描述维齐机器人的设计动机、设计过程及开发阶段。在第2节中,我们将详细描述引导我们进行机器人外观和机械设计的设计概念:外观上的友好且有机的方法,以及机械设计中的模块化方法。第3节详细描述了移动底盘、上半身和手的机械设计。第4节解释了维齐的感知运动能力,第5节列出了为其认知能力开发的软件库。第6节总结了当前进展和未来工作。

2 设计:概念与动机
人形机器人中的美学可以分为两种主要趋势:真实机器人所采用的“高科技”外观,以及源自科幻作品中更为友好且有机的设计风格。一方面,“高科技”外观受到技术展示、功能性和营销限制的驱动;另一方面,科幻领域的设计则由创造力和想象力主导,较少受到功能性的约束。这两种方法的示例如图1所示。维齐的设计理念将友好且有机的设计风格与功能性相结合。主要的设计策略是采用上半身人形结构和轮式平台实现移动,这也是外观上的主要限制因素。所选用的移动平台(Segway RMP 505)配备有大型轮子,启发了设计团队联想到直立有袋类动物(例如袋鼠),使其腰部以下形态更接近于这类动物而非完全拟人化。维齐的面部表情和手部设计受到两款机器人影响:iCub [10] 影响了其面部表情设计,而巴尔塔扎 [9] 则影响了其手部设计。
iCub的面部表情通过眉毛和嘴巴位置的LED灯阵列实现,点亮特定子阵列的LED灯以生成不同表情(见图1)。LED灯配合两个塑料外壳作为眼睑使用。维齐的面部表情设计采用了相同的LED灯和眼睑结构。巴尔塔扎的手部具有平面手掌,以及由三个电机控制的五个欠驱动手指。电机通过拉动连接至指尖的一根或多根绳索,利用单一动力源驱动三个手指关节运动。维齐的手同样是欠驱动设计,但进行了多项改进,并仅保留四个手指(详见第3节)。
机器人的其余部分,包括头部、手臂和支撑结构,在自由度及其相应的运动范围方面,均按照尽可能接近人类的标准进行设计,如表1所示。
| 关节 | 关节 | 关节 | 维齐 | |
|---|---|---|---|---|
| Head | Head | 旋转 | -70 到 70 | -53 到 53 |
| Head | Head | 颈部屈曲 | -50 到 60 | -18 到 37 |
| Head | Head | 眼球旋转 | -40 到 40 | -38 到 38 |
| Head | Head | 眼球屈曲 | -40 到 40 | -38 到 38 |
| Arm | 肩部 | 肩胛骨 屈曲 | -45 到 130 | -18 到 18 |
| Arm | 肩部 | 肩胛骨 屈曲 | -60 到 180 | -135 到 75 |
| Arm | 肩部 | 外展 | -135 到 90 | -75 到 0 |
| Arm | 肩部 | 旋转 | -90 到 90 | -85 到 85 |
| Arm | 肘 | 屈曲 | -150 到 0 | -110 到 0 |
| Arm | 前臂 | 旋前 | -90 到 90 | -85 到 85 |
| Arm | 手腕 | 外展 | -20 到 50 | -35 到 35 |
| Arm | -70 到 90 | -35 到 35 |
从工程角度来看,主要概念是定义了四个电机模块,这些模块在22个自由度上重复使用。每个模块均由一组通用部件组成,便于存储和更换损坏部件,并降低生产成本。此外,这四个模块彼此相似,仅在尺寸以及是否包含齿轮箱方面存在差异,从而使得所有类型的模块可以采用通用的装配流程,而每个模块的装配流程只需增加特定细节即可。图2展示了各模块之间的相似性及尺寸差异。
最初,维齐的外壳盖完全包裹了其机械和电子部件。后来这一概念转变为开放式外壳策略,以优化重量和生产成本。图2展示了从最初的设计草图到机器人当前版本的演变过程。
3 设计规范
本节介绍了用于构建移动底盘、躯干、手臂和头部的机械设计贡献。维齐共有30个自由度,分布如下:移动底盘2个自由度,躯干和手臂23个自由度,头部5个自由度。
3.1 移动底盘设计
移动底盘设计的主要指导原则是自主性,因此对原有的赛格威 RMP50 支撑框架进行了重新设计,以确保躯干(∼30 kg)能够安全且稳定地运动,并能承载所有电子设备和计算资源。主要组件如下:赛格威控制箱、电池、计算机和CAN接口板,如图3所示。首要目标是选择一套能够在数小时内持续运行实验的个人计算机和电池组合,所选配置包括高性能处理器(英特尔酷睿 i7-3930K 处理器 @ 3.20GHz)以及具备大量插接接口的主板(华擎 X79 极限4)。然后,根据个人计算机和电机的功耗(∼ 500W),选定的电池需能为个人计算机和躯干电机连续供电4小时。所选电池为科凯姆的125255255 (7节)。

3.2 上半身设计
上半身共有28个自由度,分布如下:腰部1个;每只手臂8个;每只手3个;头部5个。维齐相对于矢状面对称,因此左侧的机械部件在右侧有对应的复制。28个自由度中有22个被设计为四种模块类型之一。图4展示了模块的串联组装,其中电机名称与表2中列出的自由度相对应。其余6个自由度对应于手指,将在下一小节中进行说明。
四个模块类型的通用部件包括:谐波驱动器;直流电机;编码器;以及两个轴承。附加部件为福尔哈伯用于缩放扭矩限制的齿轮箱。对于大和超大型模块,额外配备了一个福尔哈伯齿轮箱(所有小和中等模块均不包含任何福尔哈伯齿轮箱)。图5展示了这两种模块的平面剖切图,其中一个没有福尔哈伯齿轮箱,另一个则带有额外的福尔哈伯齿轮箱;图6展示了所有模块类型的渲染图。请注意同一模块类型中装配选项的差异,这些装配选项是根据模块在上半身的定位。小、中和大模块有两种装配选项:(i) 在模块顶部中间,以及 (ii) 在模块的一侧。

| 身体部位 | 电机编号 | 关节名称 | 模块尺寸 |
|---|---|---|---|
| 躯干 | M0 M1 | 腰部 头部旋转(平移) | 超大 中等 |
| Head | M2 | 头部屈曲(倾斜) | 中等 |
| Head | M3 | 眼睛屈曲(倾斜) | |
| Head | M4 | 右眼旋转(平移) | |
| Head | M5 | 左眼旋转(水平转动) | |
| Head | M0R / M0L | 肩胛骨 | |
| Arm | M1R / M1L | 肩关节屈曲 | 大 |
| Arm | M2R / M2L | 肩关节外展 | 大 |
| Arm | M3R / M3L | 肩关节旋转 | 大 |
| Arm | M4R / M4L | 肘关节屈曲 | 中等 中等 |
| Arm | M5R / M5L | 前臂旋前 | |
| Arm | M6R / M6L | 腕关节外展 | 小 |
| Arm | M7R / M7L | 腕关节屈曲 | 小 |
| Arm | 小 |

3.3 手部设计
遵循巴尔塔扎的手部设计,维齐的手部技能包括基本操作动作和手势执行。操作技能包含三种力量抓握(圆柱形、球形和钩状)以及一种精细抓握(指尖对指尖)[14]。这些抓握类型可通过四个手指实现,而仅需三个电机驱动。与其他所有模块一样,这四个手指彼此相似,便于损坏部件的存储与更换,并降低生产成本。图7展示了Vizzy的手掌的掌侧和背侧,其中电机位于背侧,接触传感器可见于掌侧。每个手指都有一根绳索贯穿所有手指关节,从滑轮到指尖。图7展示了最后一根手指上绳索的位置。电机拉动绳索,使手指指节向手掌方向移动。通过改变电机速度,可以控制手指指节的最终位置。相较于巴尔塔扎,维齐的手部增加了一项改进:在手指背侧安装了一组牙科橡皮筋,以确保手指能够回到张开的位置。图7显示了牙科橡皮筋的位置。目前已实现并在图7中展示的抓握类型包括圆柱形和球形强力抓握,当前这些抓握方式工作在开环状态。接触传感器将用于闭合控制回路。

4 感知运动描述
4.1 运动学与控制器
赛格威RMP 50配备有两个电机,可实现二维平面上的全向运动。其底层控制器为速度控制器,接收线性+角目标速度。维齐躯干的丹纳维特‐哈滕伯格参数[6]及其对应的关节限位如表3所示。维齐上半身关节电机(28个电机)采用Faulhaber直流电机,可通过角度位置或速度进行控制。上身电机由10块电子板控制,这些电子板处理编码器信号并生成电机运动的控制信号,并通过脉冲宽度调制(PWM)[10]进行放大。除了底层控制器接口外,我们还实现了控制手臂运动和视线的中层接口:(i)基于iKin库的左右手臂笛卡尔控制器接口[11];以及(ii)我们的视线控制器实现7,该实现很大程度上借鉴了iCub的凝视控制器[12]。手臂控制器在笛卡尔空间中生成从当前手臂姿态到期望末端执行器姿态的轨迹。视线控制器为头部和眼球电机生成轨迹,将头部从当前视线点移动到期望的视线点。这些控制器被开发为YARP[3]模块。
| 运动链 | 关节 | A | D | α | θ偏移量 | 限位 |
|---|---|---|---|---|---|---|
| 左眼 | 腰部 | 0 | 0 | 90 | 0 | -20 到 20 |
| 左眼 | 旋转 | 0 | -0.37 | 90 180 | 0 201.2 | -53 到 53 |
| 左眼 | 颈部屈曲 | 0.1362 | 0 | -18 到 37 | ||
| 左眼 | 左眼屈曲 | 0 | 0.102 | 90 | 201.2 | -38 到 38 |
| 左眼 | 左眼旋转 | 0 | 0 | 90 | -90 | -38 到 38 |
| 右眼 | 腰部 | 0 | 0 | 90 | 0 | -20 到 20 |
| 右眼 | 旋转 | 0 | -0.37 | 90 180 | 0 201.2 | -53 到 53 |
| 右眼 | 颈部屈曲 | 0.1362 | 0 | -18 到 37 | ||
| 右眼 | 右眼屈曲 | 0 | -0.102 | 90 | 201.2 | -38 到 38 |
| 右眼 | 右眼旋转 | 0 | 0 | 90 | -90 | -38 到 38 |
| 左臂 | 腰部 | 0 | 0.0805 | 90 | 0 | -20 到 20 |
| 左臂 | 肩胛骨 | 0 | -0.212 | 90 | 0 | -18 到 18 |
| 左臂 | 肩关节屈曲 | 0 | -0.10256 90 | -90 | -75 到 135 | |
| 左臂 | 肩关节外展 | 0 | 0 | 90 | 110 | 0 到 75 |
| 左臂 | 肩关节旋转 | 0 | -0.16296 90 | 90 | -85 到 85 | |
| 左臂 | 肘关节屈曲 | 0 | 0 0.18635 9 | 90 | 0 | 0 到 110 |
| 左臂 | 前臂旋前 | 0 | 0 | -85 到 85 | ||
| 左臂 | 腕关节外展 | 0 | 0 | 90 | -90 | -35 到 35 |
| 左臂 | 腕关节屈曲 | 0.1 | 0 | 90 | 180 | -35 到 35 |
| 右臂 | 腰部 | 0 | 0.0805 | 90 | 0 | -20 到 20 |
| 右臂 | 肩胛骨 | 0 | 0.212 0.10256 9 | 90 | 0 | -18 到 18 |
| 右臂 | 肩关节屈曲 | 0 | -90 | -75 到 135 | ||
| 右臂 | 肩关节外展 | 0 | 0 0.16296 9 | 90 | 110 | 0 到 75 |
| 右臂 | 肩关节旋转 | 0 | 90 | -85 到 85 | ||
| 右臂 | 肘关节屈曲 | 0 | 0 | 90 | 0 | 0 到 110 |
| 右臂 | 前臂旋前 | 0 | -0.18635 90 | 0 | -85 到 85 | |
| 右臂 | 腕关节外展 | 0 | 0 | 90 | -90 | -35 到 35 |
| 右臂 | 腕关节屈曲 | -0.1 | 0 | 90 | 180 | -35 到 35 |
4.2 传感器
感知能力由以下设备提供:
– 一个位于移动底盘前下方的激光扫描仪Hokuyo URG‐04LX。
– 两个作为维齐左眼和右眼的PointGrey相机(Dragonfly 2),位于机器人头部。
– 一个位于胸部的ASUS XTION。
– 一个位于头部相机后方的惯性传感器 xSens Mti‐28A。
– 每只手各配备十二个接触传感器,安装在手指关节上。这些传感器由霍尔效应传感器和磁铁组成。磁铁嵌入硅胶形状中(如图7所示),当物体与手指接触时,硅胶形状会发生形变。由于磁铁会靠近霍尔传感器,从而改变霍尔传感器读数。
5 感知、导航、操作与人机交互
感知、导航和人机交互的软件库和模块可在官方 Vizzy GitHub仓库 [1] 获取。这些技能大部分基于现有软件,其余部分由我们实验室实现。详细列表如下:
– 在Gazebo中对赛格威RMP 50的模拟(segbot模拟器 [8]),已针对维齐进行适配。对于上半身模拟,我们的代码支持使用ROS控制器运行虚拟控制板,并通过Gazebo插件模拟实际控制板10。用于MoveIt的运动规划器接口(即配置文件)可在虚拟ROS控制器上获取。
– 可作为amcl ROS包12使用的自适应蒙特卡洛定位[4]。
– 可作为ROS包13获取的弹性带局部规划器[13]。
– 单目球体跟踪[16]和抓取YARP14模块15。
– 用于行人检测的聚合通道特征(ACF)[15]16。
维齐的技能实现在两种不同的中间件中:YARP 和 机器人操作系统。这一限制推动了两种中间件之间的互操作性达到可用水平,但与任何互操作性一样,仍需编写额外的软件。最近,我们一直在开发一种自动代码生成器,以减少“桥接步骤”中需要编写的代码,目前该代码生成器正处于测试阶段17。
6 结论与未来工作
我们提出了轮式人形机器人维齐的设计指南。其设计采用更有机的方法,并结合友好的姿态,打造出上半身人形结构,具有与人类极为相似的运动范围。赛格威移动底盘的大尺寸轮子启发了我们团队设计出类似有袋动物形状的下体外壳。头部外壳设计与下体外壳相匹配,形成大尺寸的头部外壳,赋予维齐独特的外形。机械设计采用模块化方法,便于存储、更换损坏部件以及降低生产成本。所有模块具有相似的结构和零件,简化了机器人的装配流程。
机器人当前具备的技能包括:(i)使用激光进行室内导航,(ii)对简单形状物体进行伸手与抓取,以及(iii)用于人机交互的行人检测。当前进展包括:(i)通过考虑接触传感器实现复杂操作技能,以及(ii)机器人操作系统和YARP平台的互操作性,以实现上半身和下半身的同步控制。待完成的工作包括:(i)面部表情的灯光,(ii)利用触摸传感器实现抓取的闭环控制,(iii)移动底盘与上半身在伸手与抓取任务中的同步控制。目前维齐已被选为CMU‐葡萄牙AHA项目18的测试平台。


















 2960
2960

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









