



 本文介绍如何使用RPA工具粒元来优化花瓣网素材采集过程,通过设置全局变量和关键词组合,实现批量搜索并自动下载不同风格的插画,提高设计师的工作效率。
本文介绍如何使用RPA工具粒元来优化花瓣网素材采集过程,通过设置全局变量和关键词组合,实现批量搜索并自动下载不同风格的插画,提高设计师的工作效率。
背景
设计师离不开花瓣网,就像西方不能失去耶路撒冷。曾几何时,一度崩溃的花瓣网遭到了全网设计者的疯狂吐槽和一片哀嚎。
言归正传,抛开崩溃的哀嚎不谈,在花瓣上搜索素材,其实也是有不少技巧的。
前段时间了解到有一类叫做RPA的工具,可以有效处理一些有规则的操作,便想到了利用rpa来采集花瓣插画素材,节约采集效率。经过了一番比较,这里我用了粒元RPA来处理采集。
场景和要素
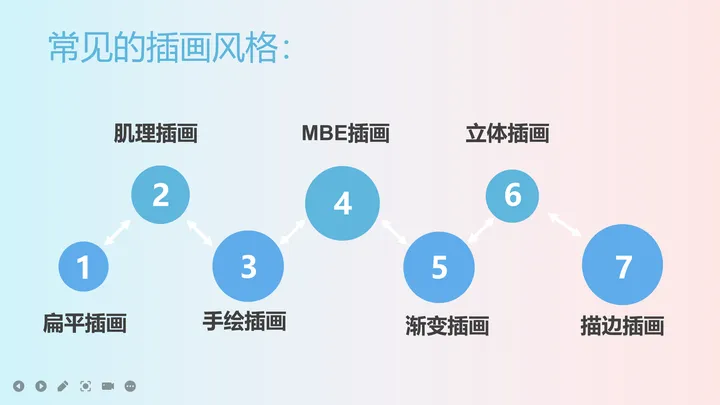
在确定插画内容以后,很多时候我们还没确定插画风格,需要比较不同风格的插画再结合自身场景再确定风格,甚至有的时候我们还需要为插画设计同时不同风格。这里我们就要给搜索内容搭配不同的关键词
采集效果
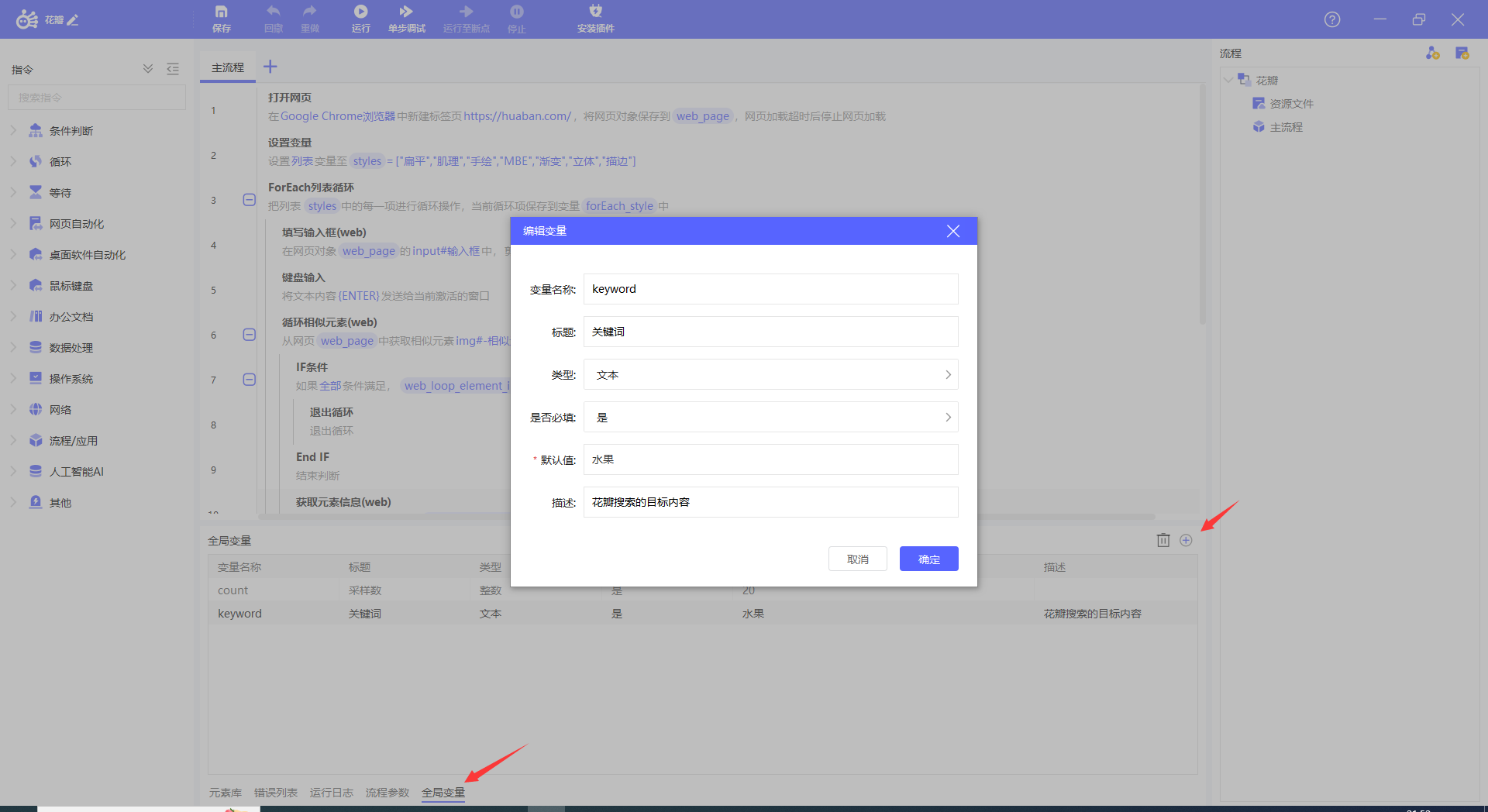
我们可以通过“全局变量”来暴露可配置的参数。
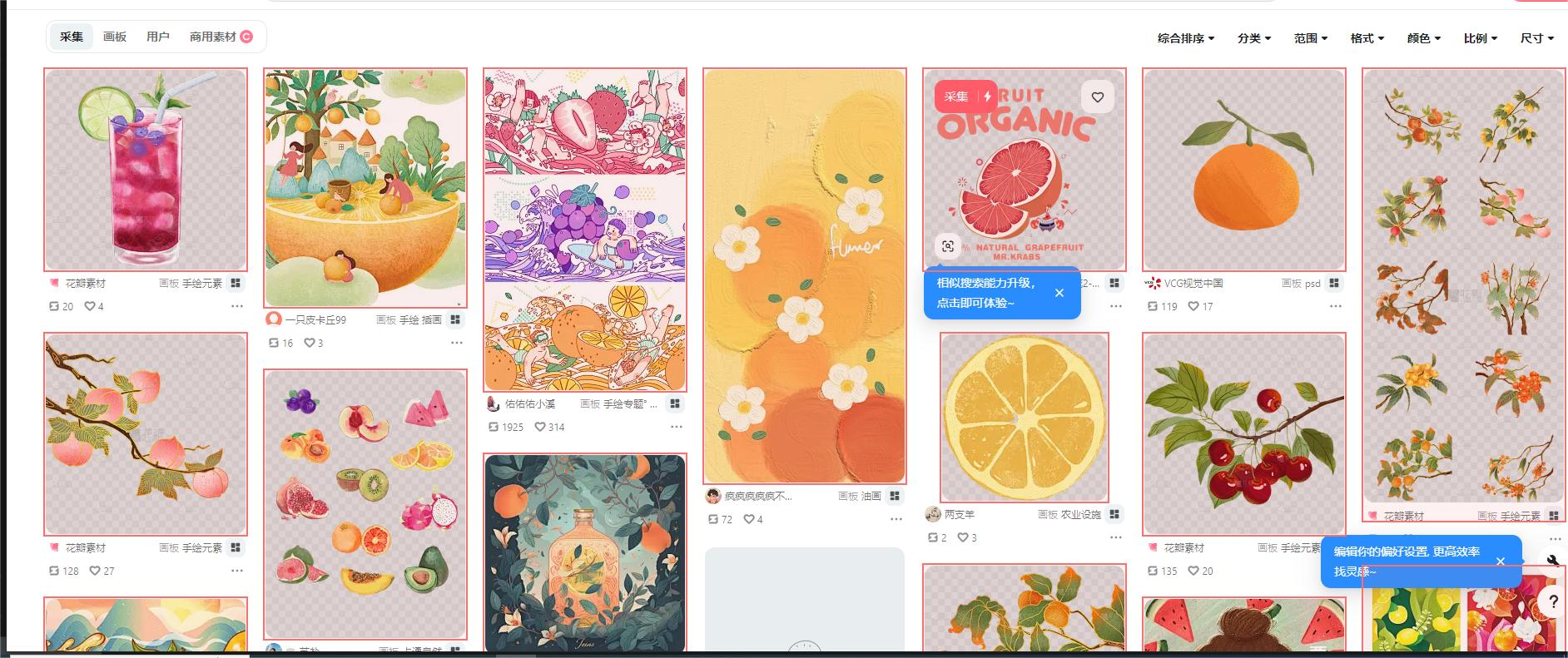
这里我设置两个参数,一个关键词就是本次需要采集的主题,这里先以水果为例;另一个是采集数,也就是每种风格一共采集的数量这是设为25个。
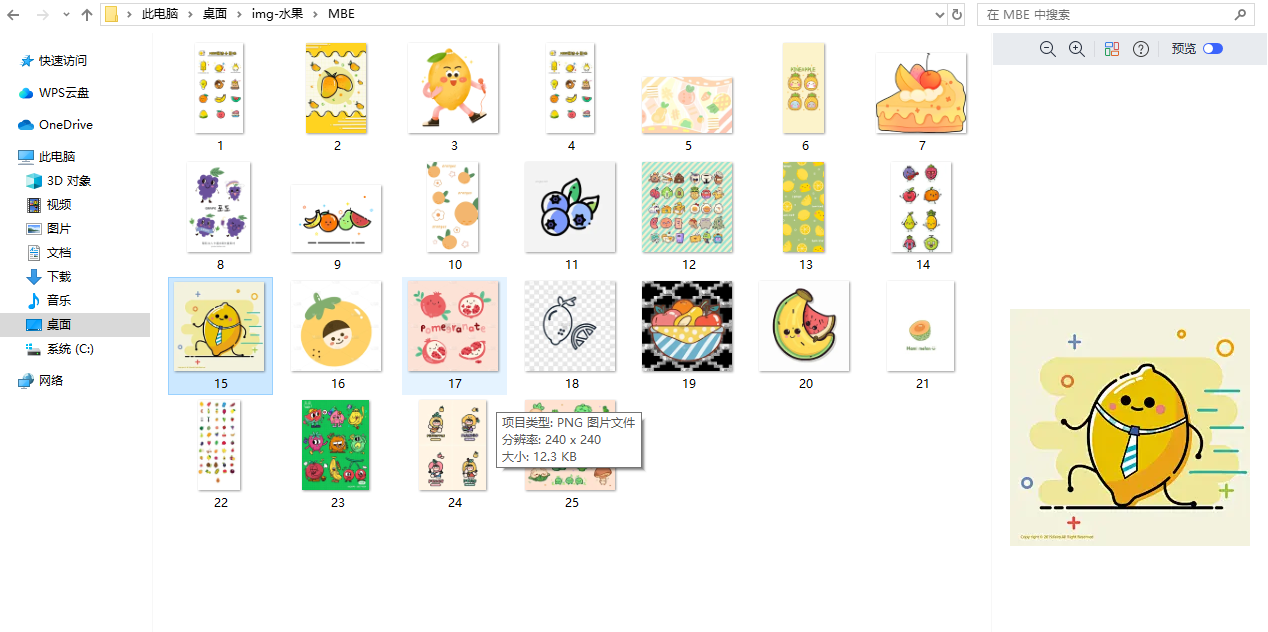
采集后面,我们在桌面得到了这样一个文件

每个文件下都是对应采集到的25张图
具体步骤设置关键词和组合
1.首先,登录RPA,新建一个PC端自动化应用。
找到全局变量,右上角新增一个全局变量作为搜索的目标
然后,执行操作步骤打开网页输入花瓣网站。找到"设置变量",将关键词组合设置成列表

2. 遍历关键词

3.填写输入框
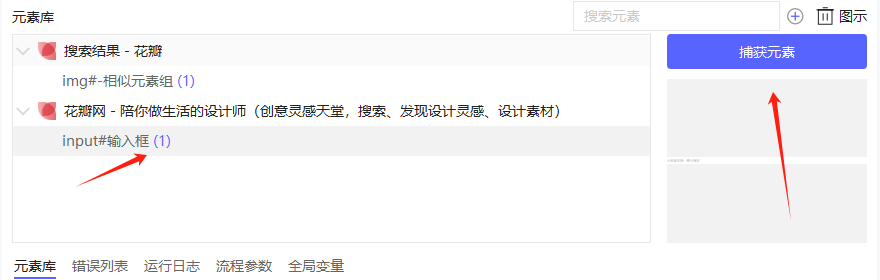
这里首先要对“元素”进行捕获,捕获后的元素会进入元素库
再调用填写输入框即可,注意选web的。这里我们输入内容,要进行一下组合,搜索内容为【目标关键词+风格+插画】。如你的目标搜索关键词是水果,那么你需要搜索的输入框内容将依次是"水果 扁平 插画"、"水果 肌理 插画"、"水果 手绘 插画"、"水果 MBE 插画"、"水果 渐变 插画"、"水果 立体 插画"、"水果 描边 插画"。

再调用键盘输入回车完成搜索
4.“循环相似元素”并抓取图片
通过“循环相似元素”可以获取搜索结果所有的图片,然后对其进行下载保存即可
注意可以通过变量对下载后的图片分门别类保存

5.增加数量控制
控制每种风格一共采集的数量。为了合理的时间效率,也是满足对采集数的不同需求
同样地这里我们先再次增加全局变量count

再添加到对应循环逻辑中,控制循环停止

6.运行
创建完成的应用保存后将出现在列表中,点击【更多】->【参数设置】可以设置运行中需要的变量,设定好关键词和采集数,点击运行。等待片刻,你需要的采集就会出现了。

小结
所谓RPA就是对重复事务的自动化,只要清晰明确要做的事和规则,交给RPA去做,一切就会水到渠成,让我们的工作更省心,生活更放松。

















 2145
2145

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









