







相信Docker技术大家都有所了解,单个Docker能发挥的作用毕竟有限,也不便于管理,所以Docker得组集群来使用才能发挥强大的技术优势。既然要组集群那就涉及诸如Docker的资源调度、管理等等一系列问题。目前涉及Docker集群的三个主要的技术无外乎Swarm、Kubernetes、Mesos三种。
一、什么是Docker Swarm
Swarm是Docker公司推出的用来管理docker集群的平台,几乎全部用GO语言来完成的开发的,代码开源在https://github.com/docker/swarm, 它是将一群Docker宿主机变成一个单一的虚拟主机,Swarm使用标准的Docker API接口作为其前端的访问入口,换言之,各种形式的DockerClient(compose,docker-py等)均可以直接与Swarm通信,甚至Docker本身都可以很容易的与Swarm集成,这大大方便了用户将原本基于单节点的系统移植到Swarm上,同时Swarm内置了对Docker网络插件的支持,用户也很容易的部署跨主机的容器集群服务。
Docker Swarm 和 Docker Compose 一样,都是 Docker 官方容器编排项目,但不同的是,Docker Compose 是一个在单个服务器或主机上创建多个容器的工具,而 Docker Swarm 则可以在多个服务器或主机上创建容器集群服务,对于微服务的部署,显然 Docker Swarm 会更加适合。
从 Docker 1.12.0 版本开始,Docker Swarm 已经包含在 Docker 引擎中(docker swarm),并且已经内置了服务发现工具,我们就不需要像之前一样,再配置 Etcd 或者 Consul 来进行服务发现配置了。
Swarm deamon只是一个调度器(Scheduler)加路由器(router),Swarm自己不运行容器,它只是接受Docker客户端发来的请求,调度适合的节点来运行容器,这就意味着,即使Swarm由于某些原因挂掉了,集群中的节点也会照常运行,放Swarm重新恢复运行之后,他会收集重建集群信息。
二、Docker Swarm 基本结构图
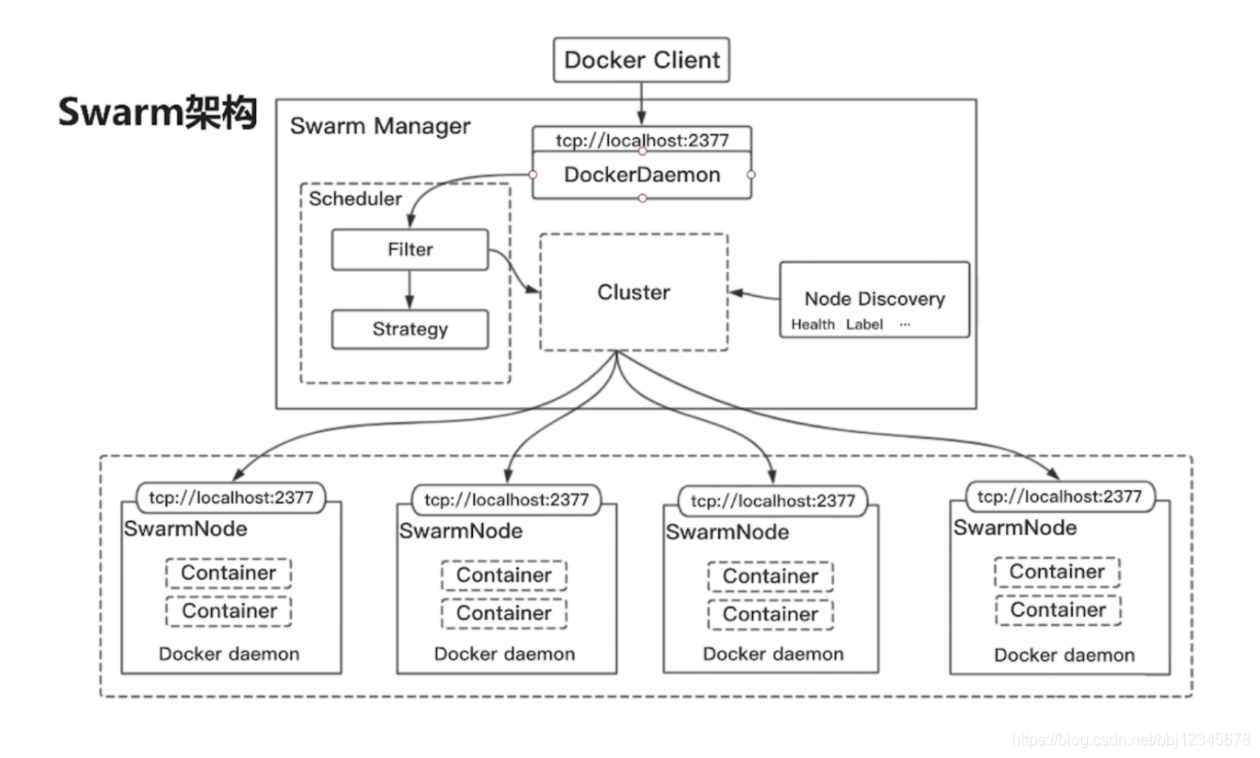
在结构图可以看出 Docker Client使用Swarm对 集群(Cluster)进行调度使用。
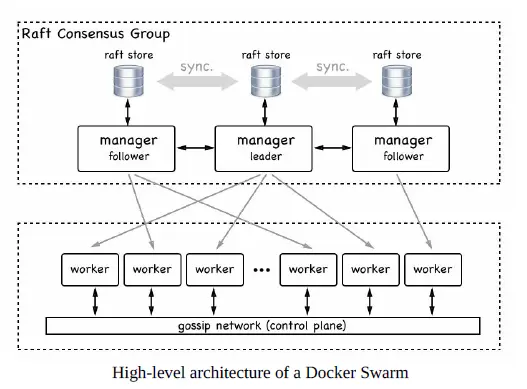
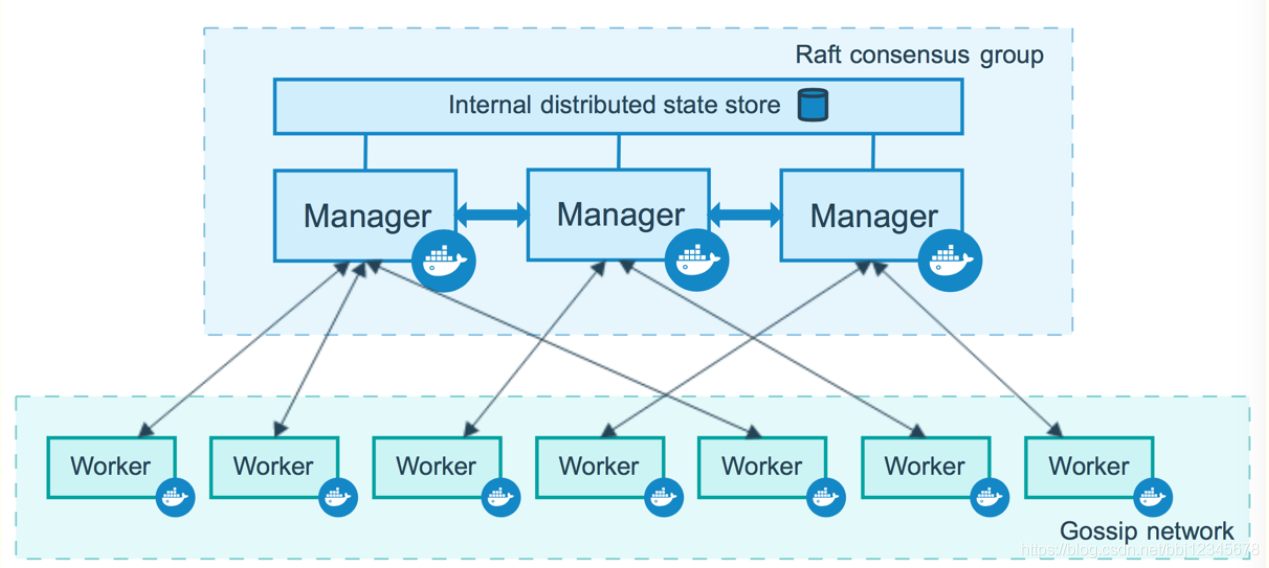
上图可以看出,Swarm是典型的master-slave结构,通过发现服务来选举manager。manager是中心管理节点,各个node上运行agent接受manager的统一管理,集群会自动通过Raft协议分布式选举出manager节点,无需额外的发现服务支持,避免了单点的瓶颈问题,同时也内置了DNS的负载均衡和对外部负载均衡机制的集成支持
三.Swarm的几个关键概念
1.Swarm
集群的管理和编排是使用嵌入docker引擎的SwarmKit,可以在docker初始化时启动swarm模式或者加入已存在的swarm
2.Node
一个节点是docker引擎集群的一个实例。您还可以将其视为Docker节点。您可以在单个物理计算机或云服务器上运行一个或多个节点,但生产群集部署通常包括分布在多个物理和云计算机上的Docker节点。
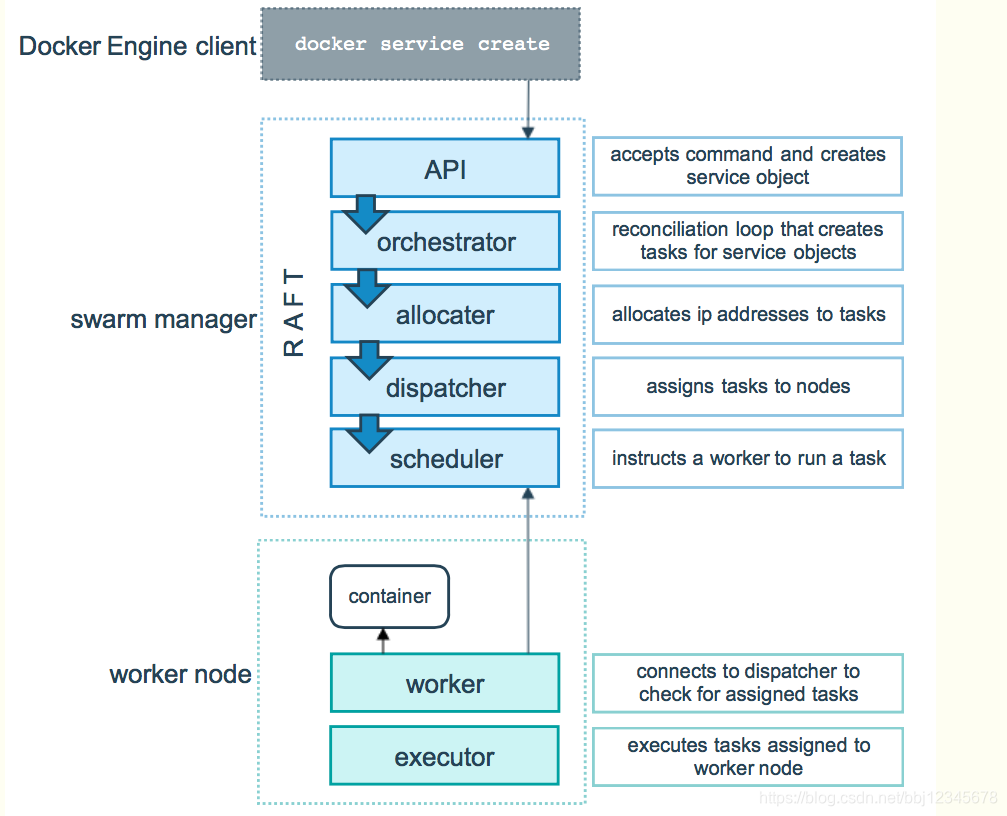
要将应用程序部署到swarm,请将服务定义提交给 管理器节点。管理器节点将称为任务的工作单元分派 给工作节点。
Manager节点还执行维护所需群集状态所需的编排和集群管理功能。Manager节点选择单个领导者来执行编排任务。
工作节点接收并执行从管理器节点分派的任务。默认情况下,管理器节点还将服务作为工作节点运行,但您可以将它们配置为仅运行管理器任务并且是仅管理器节点。代理程序在每个工作程序节点上运行,并报告分配给它的任务。工作节点向管理器节点通知其分配的任务的当前状态,以便管理器可以维持每个工作者的期望状态。
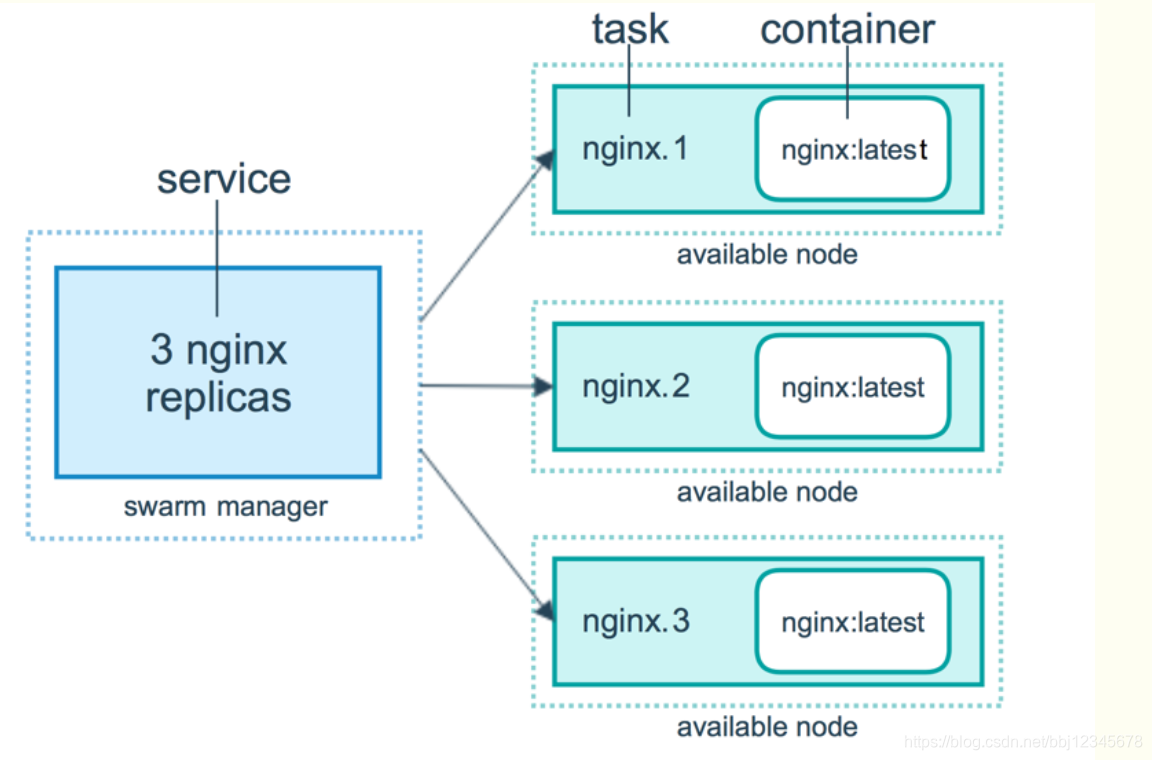
3.Service
一个服务是任务的定义,管理机或工作节点上执行。它是群体系统的中心结构,是用户与群体交互的主要根源。创建服务时,你需要指定要使用的容器镜像。
4.Task
任务是在docekr容器中执行的命令,Manager节点根据指定数量的任务副本分配任务给worker节点
------------------------------------------使用方法-------------------------------------docker swarm:集群管理,子命令有init, join, leave, update。(docker swarm --help查看帮助)
docker node:节点管理,子命令有accept, promote, demote, inspect, update, tasks, ls, rm。(docker node --help查看帮助)
docker service:服务创建,子命令有create, inspect, update, remove, tasks。(docker service--help查看帮助)
node是加入到swarm集群中的一个docker引擎实体,可以在一台物理机上运行多个node,node分为:
manager nodes,也就是管理节点
worker nodes,也就是工作节点
1)manager node管理节点:执行集群的管理功能,维护集群的状态,选举一个leader节点去执行调度任务。集群需要至少一个manager节点,节点之间使用Raft consensus protocol进行协同工作。通常,第一个启用docker swarm的节点将成为leader,后来加入的都是follower。当前的leader如果挂掉,剩余的节点将重新选举出一个新的leader。每一个manager都有一个完整的当前集群状态的副本,可以保证manager的高可用。
2)worker node工作节点:接收和执行任务。参与容器集群负载调度,仅用于承载task。
worker节点是运行实际应用服务的容器所在的地方。理论上,一个manager节点也能同时成为worker节点,但在生产环境中,我们不建议这样做。
worker节点之间,通过control plane进行通信,这种通信使用gossip协议,并且是异步的。3)service服务:一个服务是工作节点上执行任务的定义。创建一个服务,指定了容器所使用的镜像和容器运行的命令。 service是运行在worker nodes上的task的描述,service的描述包括使用哪个docker 镜像,以及在使用该镜像的容器中执行什么命令。
它就像一个描述了下面物品的清单列表一样:
- 服务名称
- 使用哪个镜像来创建容器
- 要运行多少个副本
- 服务的容器要连接到哪个网络上
- 应该映射哪些端口
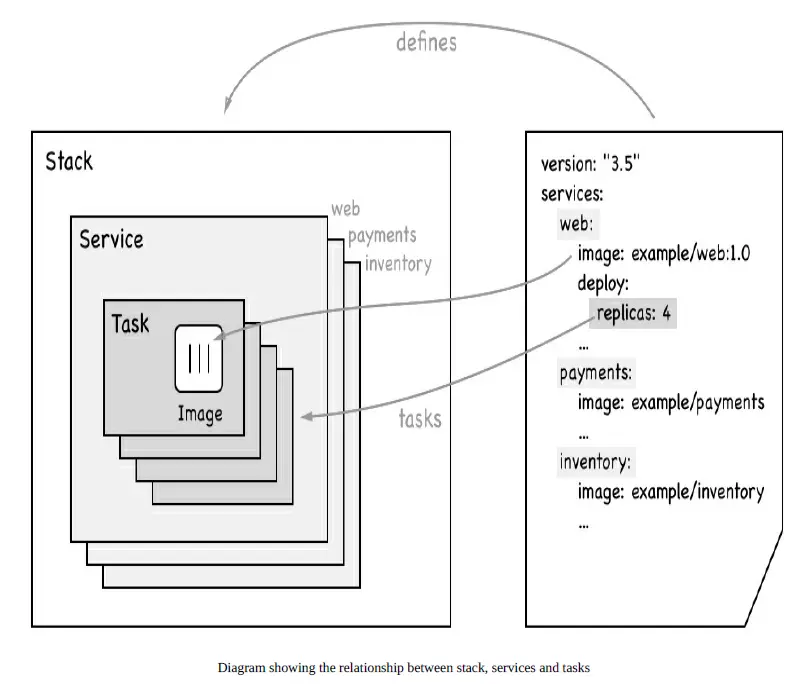
4)task任务:一个任务包含了一个容器及其运行的命令。task是service的执行实体,task启动docker容器并在容器中执行任务。在Docker Swarm中,task是一个部署的最小单元,task与容器是一对一的关系。5)stack是描述一系列相关services的集合。我们通过在一个YAML文件中来定义一个stack。
集群中经常谈到的stacks, services, tasks,他们之间的关系。
四、Swarm的工作模式
1. Node
2. Service
3. 任务与调度
4. 服务副本与全局服务
五、Swarm的调度策略
Swarm在调度(scheduler)节点(leader节点)运行容器的时候,会根据指定的策略来计算最适合运行容器的节点,目前支持的策略有:spread, binpack, random.
1)Random
顾名思义,就是随机选择一个Node来运行容器,一般用作调试用,spread和binpack策略会根据各个节点的可用的CPU, RAM以及正在运行的容器的数量来计算应该运行容器的节点。
2)Spread
在同等条件下,Spread策略会选择运行容器最少的那台节点来运行新的容器,binpack策略会选择运行容器最集中的那台机器来运行新的节点。使用Spread策略会使得容器会均衡的分布在集群中的各个节点上运行,一旦一个节点挂掉了只会损失少部分的容器。
3)Binpack
Binpack策略最大化的避免容器碎片化,就是说binpack策略尽可能的把还未使用的节点留给需要更大空间的容器运行,尽可能的把容器运行在一个节点上面。
六、Swarm Cluster模式特性
1)批量创建服务
建立容器之前先创建一个overlay的网络,用来保证在不同主机上的容器网络互通的网络模式
2)强大的集群的容错性
当容器副本中的其中某一个或某几个节点宕机后,cluster会根据自己的服务注册发现机制,以及之前设定的值--replicas n,在集群中剩余的空闲节点上,重新拉起容器副本。整个副本迁移的过程无需人工干预,迁移后原本的集群的load balance依旧好使!不难看出,docker service其实不仅仅是批量启动服务这么简单,而是在集群中定义了一种状态。Cluster会持续检测服务的健康状态
并维护集群的高可用性。
3)服务节点的可扩展性
Swarm Cluster不光只是提供了优秀的高可用性,同时也提供了节点弹性扩展或缩减的功能。当容器组想动态扩展时,只需通过scale参数即可复制出新的副本出来。仔细观察的话,可以发现所有扩展出来的容器副本都run在原先的节点下面,如果有需求想在每台节点上都run一个相同的副本,方法其实很简单,只需要在命令中将"--replicas n"更换成"--mode=global"即可!
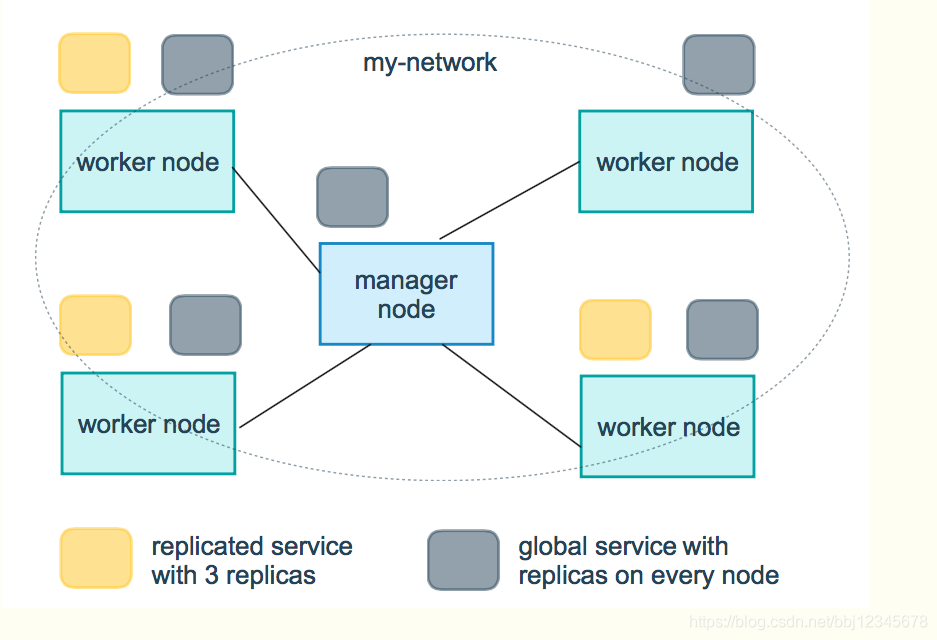
复制服务(--replicas n)
将一系列复制任务分发至各节点当中,具体取决于您所需要的设置状态,例如“--replicas 3”。
全局服务(--mode=global)
适用于集群内全部可用节点上的服务任务,例如“--mode global”。如果大家在 Swarm 集群中设有 7 台 Docker 节点,则全部节点之上都将存在对应容器。
4. 调度机制
所谓的调度其主要功能是cluster的server端去选择在哪个服务器节点上创建并启动一个容器实例的动作。它是由一个装箱算法和过滤器组合而成。每次通过过滤器(constraint)启动容器的时候,swarm cluster 都会调用调度机制筛选出匹配约束条件的服务器,并在这上面运行容器。
------------------Swarm cluster的创建过程包含以下三个步骤----------------------
1)发现Docker集群中的各个节点,收集节点状态、角色信息,并监视节点状态的变化
2)初始化内部调度(scheduler)模块
3)创建并启动API监听服务模块
一旦创建好这个cluster,就可以用命令docker service批量对集群内的容器进行操作,非常方便!
在启动容器后,docker 会根据当前每个swarm节点的负载判断,在负载最优的节点运行这个task任务,用"docker service ls" 和"docker service ps + taskID" 可以看到任务运行在哪个节点上。容器启动后,有时需要等待一段时间才能完成容器创建。
————————————————
版权声明:本文为优快云博主「fastjson_」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.youkuaiyun.com/bbj12345678/article/details/115918651
相关文章:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









