



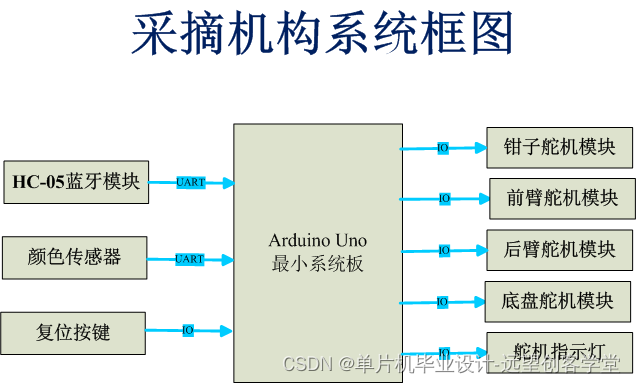
系统功能:
使用MeArm机械臂, 上电后四路舵机处于初始90度位置,通过APP"蓝牙调试器"连接手机后可通过手机端控制四路舵机执行单独或连续的动作,并读取颜色传感器的RGB值。
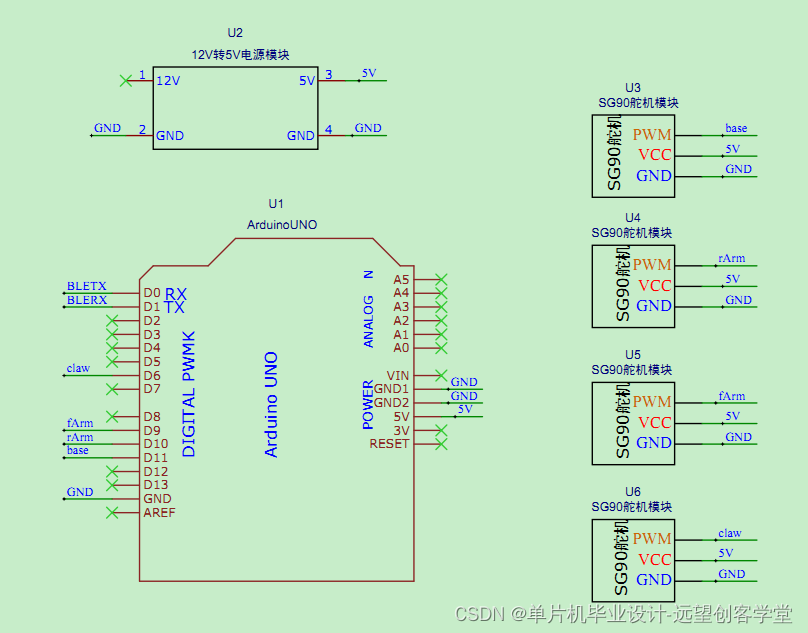
主要功能模块原理图:
系统主要功能模块代码
//存储电机极限值(const指定该数值为常量,常量数值在程序运行中不能改变)
//底盘舵机范围
const int baseMin = 0;
const int baseMax = 180;
//后臂舵机范围
const int rArmMin = 45;
const int rArmMax = 180;
//前臂舵机范围
const int fArmMin = 35;
const int fArmMax = 120;
//钳子舵机范围
const int clawMin = 25;
const int clawMax = 100;
int DSD = 15; //Default Servo Delay (默认电机运动延迟时间)
//此变量用于控制电机运行速度.增大此变量数值将
//降低电机运行速度从而控制机械臂动作速度。
//检测到的颜色值
unsigned char colorVal = 0;
void setup(void)
{
//舵机管脚配置
base.attach(11); // base 伺服舵机连接引脚11 舵机代号'b'
delay(200); // 稳定性等待
rArm.attach(10); // rArm 伺服舵机连接引脚10 舵机代号'r'
delay(200); // 稳定性等待
fArm.attach(9); // fArm 伺服舵机连接引脚9 舵机代号'f'
delay(200); // 稳定性等待
claw.attach(6); // claw 伺服舵机连接引脚6 舵机代号'c'
delay(200); // 稳定性等待
//初始舵机位置设置
base.write(90);
delay(10);
fArm.write(90);
delay(10);
rArm.write(90);
delay(10);
claw.write(90);
delay(10);
// 初始化数字引脚13作为输出,数字化引脚13为板载LED
pinMode(13, OUTPUT);
digitalWrite(13, LOW); //关闭板载LED
Serial.begin(9600);
colorSerial.begin(9600);
}此设计提供的资料包含原理图PCB(包含PDF,AD,立创EDA三个版本),源代码,系统框图,主程序流程图,物料清单(包含使用到的器件手册),功能操作说明等。



















 1025
1025

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











