







 该设计结合超声波感应、离线语音模块和STM32微控制器实现垃圾分类与提示功能。当人靠近时,系统会语音提示垃圾应分类,同时检测垃圾桶满载状态并用语音反馈。采用HC-SR04模块进行测距,STM32利用捕获功能计算距离。此外,系统还能通过步进电机控制垃圾桶盖的开合。
该设计结合超声波感应、离线语音模块和STM32微控制器实现垃圾分类与提示功能。当人靠近时,系统会语音提示垃圾应分类,同时检测垃圾桶满载状态并用语音反馈。采用HC-SR04模块进行测距,STM32利用捕获功能计算距离。此外,系统还能通过步进电机控制垃圾桶盖的开合。
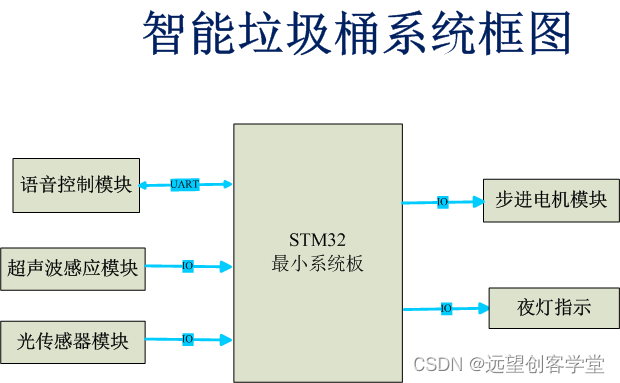
一. 系统设计及框图:
本设计整体功能如下:
1. 超声波感应到有人靠近时语音提示“垃圾放置请分类”。
2. 检测垃圾筒时是否满,当满时语音提示“垃圾桶已满”。
3. 光传感器检测,指示灯指示。
4. 语音识别不同的垃圾类型。
二. 离线语音模块的设计:
离线语音模块SU-03T的基本使用可参考本人csdn文章:
SU-03离线语音模块的配置使用_su03t语音模块_远望创客学堂的博客-优快云博客
语音设计指令如下:

三. MCU模块的选型:
本设计使用STM32最小系统板,如下图所示
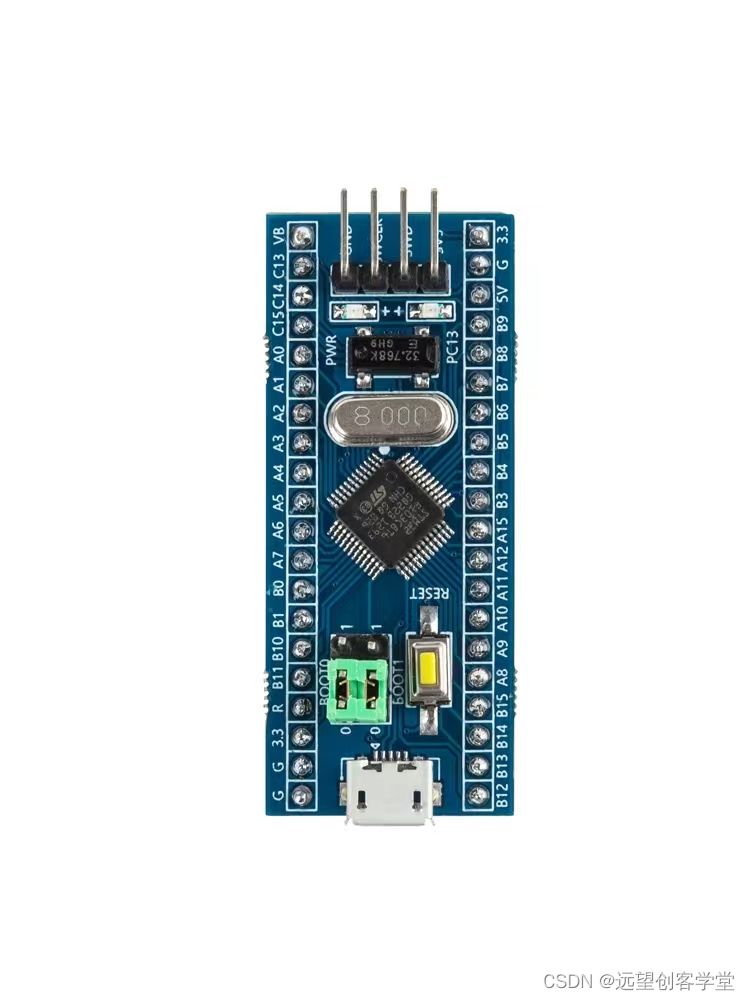
也可以使用ESP32或ESP8266模块,本设计支持其它MCU的功能定制。
四. 超声波感应测距
技术支持请加Q,一起学习新知识。删除& —等特殊字符277&94一3&652。
本设计中使用HC-SR04超声波测距模块,测距原理是超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回,超声波接收器收到反射波就立即停止计时。测试距离=(计时时间*声速)/2
时序解析:
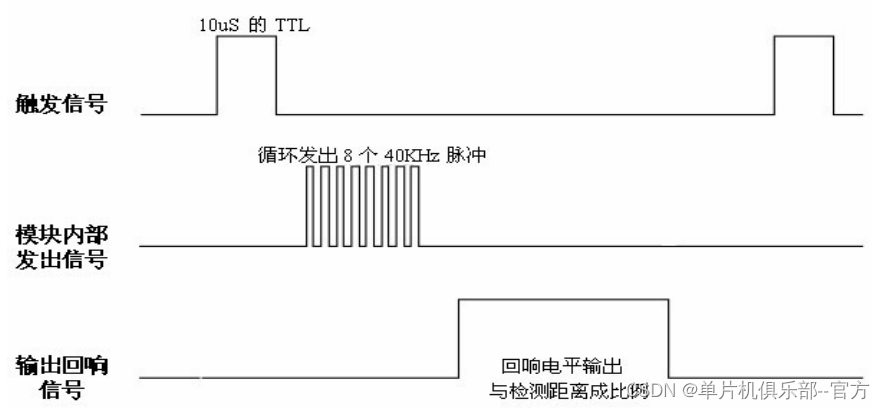
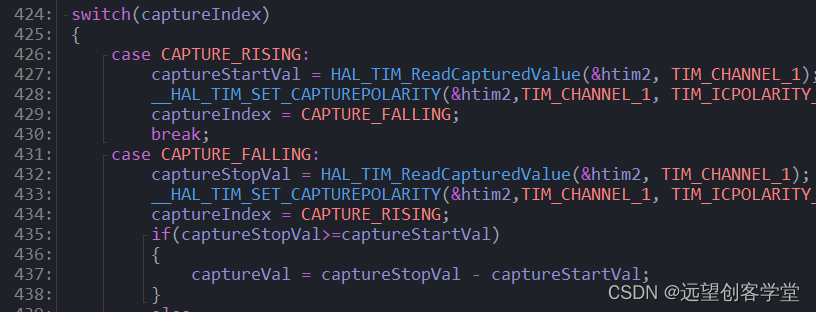
STM32使用捕获功能测量高电平信号的宽度来计算距离值
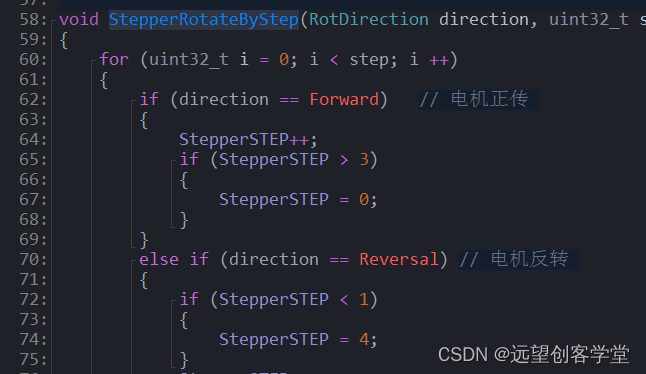
五. 步进电机驱动
系统驱动步进电机正反转来模拟垃圾桶盖的开启和关闭,



















 5763
5763

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











