






 本文深入探讨了Bootstrap框架中的各种布局设计元素,包括其优点、令人困惑之处及重复设计问题,作者分享了对某些设计的喜爱与疑惑,为前端开发者提供了独特的视角。
本文深入探讨了Bootstrap框架中的各种布局设计元素,包括其优点、令人困惑之处及重复设计问题,作者分享了对某些设计的喜爱与疑惑,为前端开发者提供了独特的视角。
bootstrap的布局内容很多很丰富,以一个个去尝试,能很好的扩展人的视野,尤其是像我这种没见过什么世面的程序员。确实增长了很多见识。很多时候,不是自己不想做得更好,只是受限于自己的见识,没见过更好的。而一旦见过了更好的,就觉得这应该添加到自己的list里面去,以后就这么干。
例如
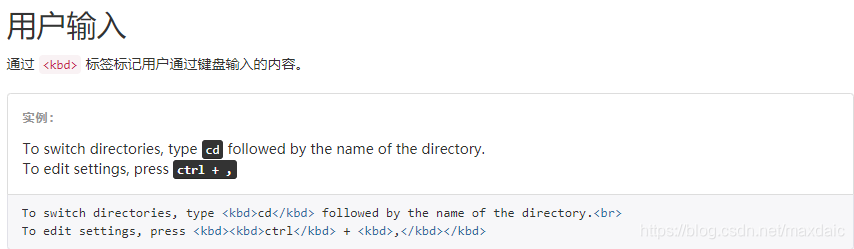
这个小黑块真的是太让人喜欢了,醒目,强烈的区分度啊。

我就是喜欢这一行文字前面那一竖的小灰块,看着就是让人感觉更专业,更正式。
但是也有一些让我觉得有些摸不着头脑的设计,感觉效果没有多好,一般般嘛,如
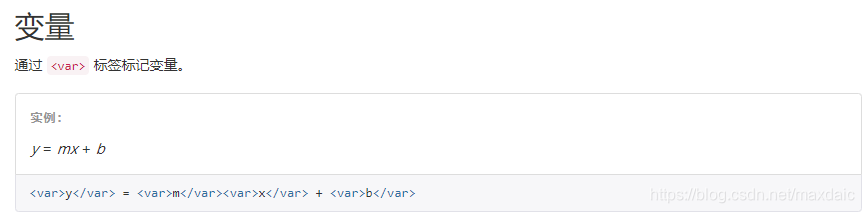
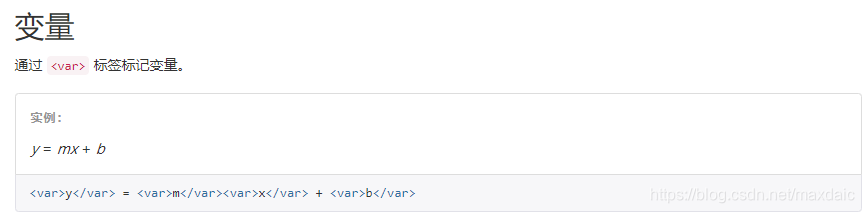 这和普通倾斜的文本有什么不同?还整得那么一长串的标签去修饰,看得人脑壳疼。
这和普通倾斜的文本有什么不同?还整得那么一长串的标签去修饰,看得人脑壳疼。
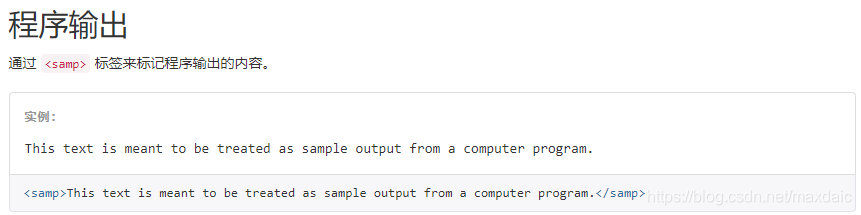
这和普通的文本显示效果有什么不同?
也有些设计在我看来这些设计都是重复设计,根本没什么区别。如
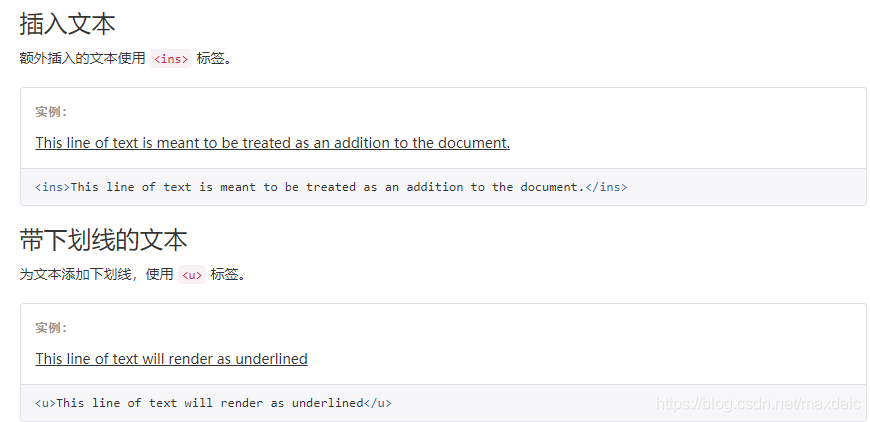
不都是在文本下多了个下划线吗?干嘛又要分成两种标签?
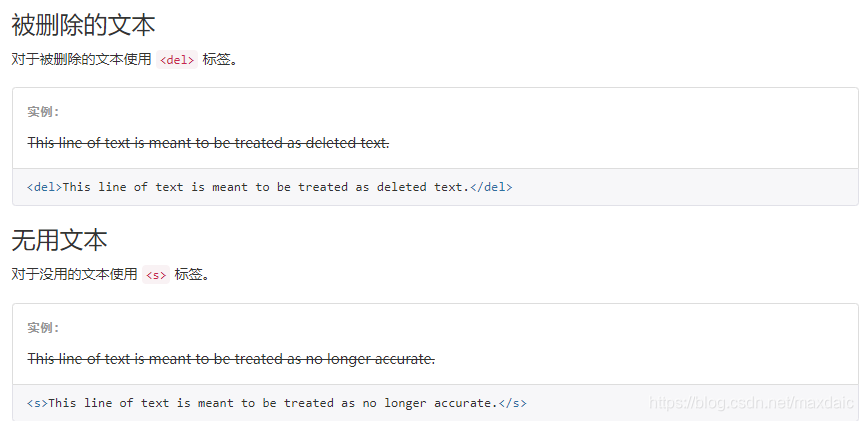
这被删除文本和无用文本不都是文本中有个横线,干嘛又要做两个标签,仅仅是为了语义上做区分。

















 1110
1110

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









