



✅作者简介:热爱科研的Matlab仿真开发者,擅长数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
🍊个人信条:格物致知,完整Matlab代码及仿真咨询内容私信。
🔥 内容介绍
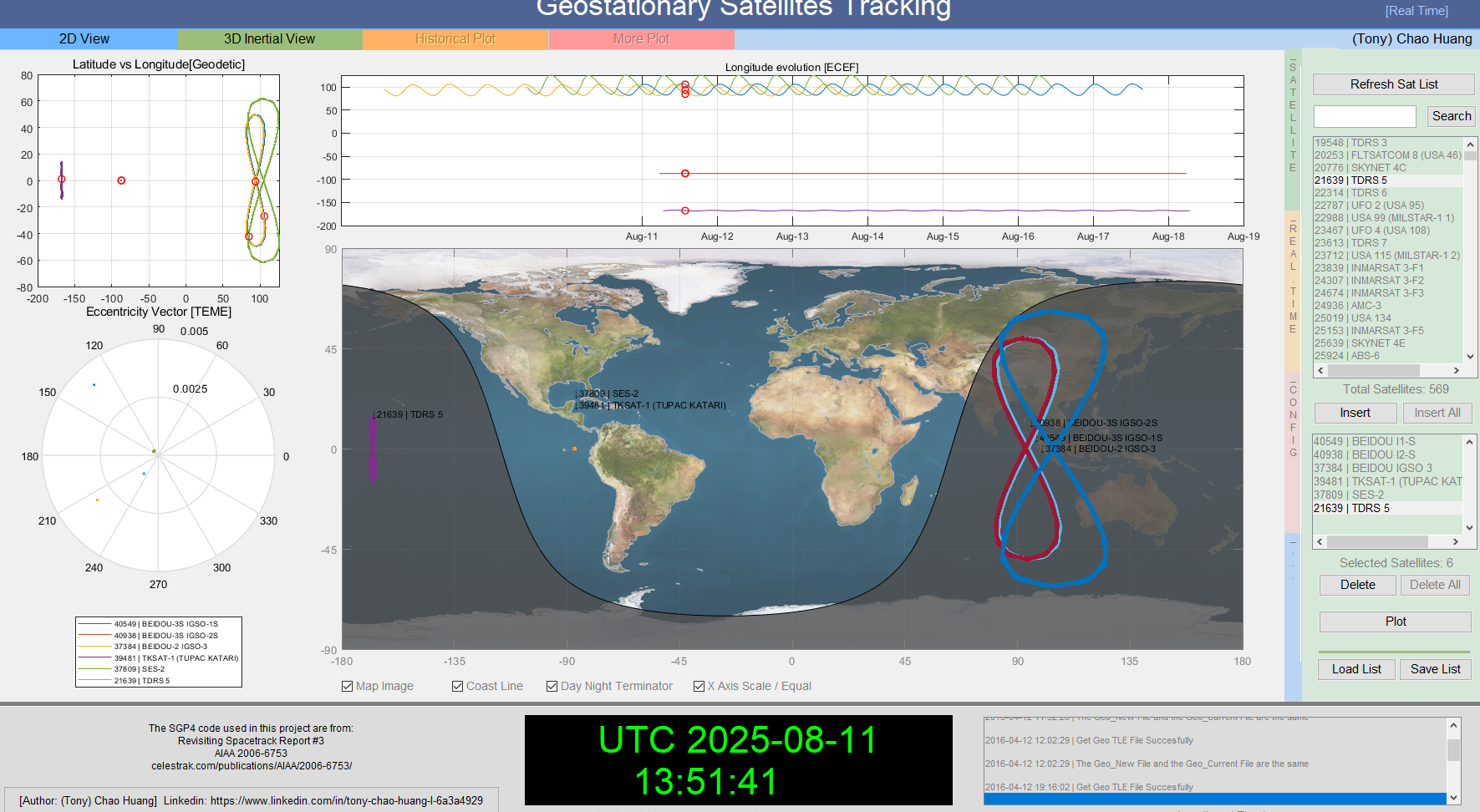
地球静止轨道卫星:轨道预测与跟踪的重要性
地球静止轨道位于赤道平面上空约 36000 公里处,运行于此轨道的卫星绕地球公转周期与地球自转周期严格同步,从地面上看,卫星就像 “悬停” 在天空某一固定位置。通信领域中,全球各地的电视信号、互联网数据传输,很大程度依赖这些卫星搭建起的 “太空桥梁”,实现跨洋、跨洲的信息快速传递。气象监测时,卫星能持续捕捉地球云图、温度、湿度等气象数据,为天气预报、灾害预警提供一手资料,帮助人类提前防范台风、暴雨等极端天气。军事侦察中,其凭借居高临下的视野优势,对地面目标进行全天候监控,守护国家安全。
但地球静止轨道并非 “平静地带”,卫星会受到地球非球形引力、日月引力摄动、太阳光压等多种复杂因素干扰,这些干扰日积月累,会使卫星逐渐偏离预定轨道。一旦轨道偏差超出允许范围,卫星通信信号可能中断、气象监测数据出现偏差、军事侦察精度大打折扣,后果不堪设想。所以,实时、精准预测和跟踪卫星轨道,及时调整卫星姿态与轨道参数,维持卫星稳定运行,成为航天领域亟待攻克的关键课题。
传统轨道预测与跟踪方法:困境与局限
在早期航天探索阶段,科学家主要依靠基于天体力学的经典轨道理论预测和跟踪卫星轨道。这些方法以开普勒定律为基础,结合牛顿万有引力定律,建立卫星运动方程,通过求解方程预测卫星位置。但实际应用中,传统方法暴露出诸多弊端。
复杂环境下,地球非球形引力会使卫星轨道产生复杂摄动,经典理论难以精确描述。太阳光压对卫星轨道的影响,因卫星形状、表面材料特性等因素变得复杂,传统模型无法准确考虑。这导致预测结果与卫星实际轨道偏差逐渐增大,长期预测精度严重不足。并且,传统方法在处理大量观测数据时效率低下。早期地面跟踪站收集的卫星观测数据,需人工整理、分析,计算过程繁琐,数据处理速度远远赶不上卫星轨道变化速度,难以满足实时性要求。
⛳️ 运行结果
📣 部分代码
%from celestrak.com automatically every programmable period of time and
%propagate it with SGP4 code. With this program we can plot multiple satellites
%simultaneously, also we can change many configurations and save it.
%Author: (Tony) Chao Huang
%Major: Electronic Engineer
%From: Santa Cruz - Bolivia
%Email: tony.c.huang@outlook.com (personal public email), chao.huang@abe.bo (only for official contact)
%LinkedIn: https://www.linkedin.com/in/tony-chao-huang-l-6a3a4929
%Current Work: Space Segment Engineer, Bolivian Space Agency - ABE (www.abe.bo)
%Current Study: Master Candidate in Space Technology Application - Remote Sensing and GIS
%BeiHang University, Regional Centre for Space Science and
%Technology Education in Asia and the Pacific (China)(Affiliated to the United Nations) - RCSSTEAP
%Current City: Beijing - China
%January - 2016
function propagation_result=propagate_TLE(sat_cells,min_before_epoch,min_after_epoch,timestep,propagation_mode,wgs_const,leap_second)
%input
%sat_cells: struct with TLE
%min_before_epoch: propagate from minutes before TLE epoch (can be 0 or negative number)
%min_after_epoch: propagate to minutes after TLE epoch
%output
%propagation_result: struct with the propagation results
%base on:
% script testmat.m
%
% This script tests the SGP4 propagator.
% Author:
% Jeff Beck
% beckja@alumni.lehigh.edu
% Version Info:
% 1.0 (051019) - Initial version from Vallado C++ version.
% 1.0 (aug 14, 2006) - update for paper
% 2.0 (apr 2, 2007) - update for manual operations
% 3.0 (3 jul, 2008) - update for opsmode operation afspc or improved
% 3.1 (2 dec, 2008) - fix tsince/1440.0 in jd update
% these are set in sgp4init
global tumin mu radiusearthkm xke j2 j3 j4 j3oj2
global opsmode
propagation_result = sat_cells;
% // ------------------------ implementation --------------------------
% add operation smode for afspc (a) or improved (i)
% afspc='a', improved= 'i' initl.m
opsmode= propagation_mode; %'i'; %improved mode - Config
whichconst = wgs_const; %84; %WGS-84 getgravc.m - config
% //typerun = 'c' compare 1 year of full satcat data
% //typerun = 'v' verification run, requires modified elm file with
% //typerun = 'm' maunual operation- either mfe, epoch, or dayof yr
% // start stop and delta times
%typerun = 'v'; %v=verification run without input().... for twoline2rv .. sugestion: modiy this function
%we use this mode because we don't need the startmfe, stopmfe, deltamin
%output information from twoline2rv()
typerun = 'c'; %use typerun = 'c' catalog mode (propagates at 20 min timesteps from one day before epoch to one day after)
typeinput='e'; %any value; check twoline2rv.m
rad = 180.0 / pi;
% // ---------------- setup files for operation ------------------
% // input 2-line element set file
% infilename = 'tk.txt';
% infile = fopen(infilename, 'r');
% if (infile == -1)
% fprintf(1,'Failed to open file: %s\n', infilename);
% return;
% end
% outfile = fopen('tmatver.out', 'wt');
error_log=fopen('TLE_Data\progation_error.txt', 'a');
% global idebug dbgfile
% // ----------------- test simple propagation -------------------
total_sat=size(sat_cells,2);
for (sat_n=1:total_sat)
%while (~feof(infile))
% longstr1 = fgets(infile, 130);
% while ( (longstr1(1) == '#') && (feof(infile) == 0) )
% longstr1 = fgets(infile, 130);
% end
%
% if (feof(infile) == 0)
%
% longstr2 = fgets(infile, 130);
% if idebug
% catno = strtrim(longstr1(3:7));
% dbgfile = fopen(strcat('sgp4test.dbg.',catno), 'wt');
% fprintf(dbgfile,'this is the debug output\n\n' );
% end
% // convert the char string to sgp4 elements
% // includes initialization of sgp4
%we use typerun = 'c' because we don't need the startmfe, stopmfe, deltamin
%output information from twoline2rv()
[satrec, startmfe, stopmfe, deltamin] = twoline2rv( whichconst, ...
sat_cells{sat_n}.line1, sat_cells{sat_n}.line2, typerun, typeinput);
startmfe = min_before_epoch;
stopmfe = min_after_epoch;
deltamin = timestep;
% fprintf(outfile, '%d xx\n', satrec.satnum);
% fprintf(1,' %d\n', satrec.satnum);
% // call the propagator to get the initial state vector value
[satrec, ro ,vo] = sgp4 (satrec, 0.0);
% fprintf(outfile, ' %16.8f %16.8f %16.8f %16.8f %12.9f %12.9f %12.9f\n',...
% satrec.t,ro(1),ro(2),ro(3),vo(1),vo(2),vo(3));
% fprintf(1, ' %16.8f %16.8f %16.8f %16.8f %12.9f %12.9f %12.9f\n',...
% satrec.t,ro(1),ro(2),ro(3),vo(1),vo(2),vo(3));
%tsince = startmfe;
tsince = startmfe - deltamin;
% // check so the first value isn't written twice
% if ( abs(tsince) > 1.0e-8 )
% tsince = tsince - deltamin;
% end
% // loop to perform the propagation
n=1; % output data line 1 first epoch
output_data=zeros(1,23);
while ((tsince < stopmfe) && (satrec.error == 0))
tsince = tsince + deltamin;
if(tsince > stopmfe)
tsince = stopmfe;
end
[satrec, ro, vo] = sgp4 (satrec, tsince); %ECI\TEME coordinate
if (satrec.error > 0)
fprintf(error_log,'# *** error: t:= %f *** code = %3i\n', tsince, satrec.error);
end
if (satrec.error == 0)
jd = satrec.jdsatepoch + tsince/1440.0;
[year,mon,day,hr,minute,sec] = invjday ( jd );
output_data(n,1:7) = [tsince,ro(1),ro(2),ro(3),vo(1),vo(2),vo(3)]; %change code to improve velocity - preallocate
% fprintf(outfile, ' %16.8f %16.8f %16.8f %16.8f %12.9f %12.9f %12.9f',...
% tsince,ro(1),ro(2),ro(3),vo(1),vo(2),vo(3));
% fprintf(1, ' %16.8f %16.8f %16.8f %16.8f %12.9f %12.9f %12.9f \n',...
% tsince,ro(1),ro(2),ro(3),vo(1),vo(2),vo(3));
[p,a,ecc,incl,node,argp,nu,m,arglat,truelon,lonper] = rv2coe (ro,vo,mu); %ECI\TEME coordinate
output_data(n,8:21) = [ a, ecc, incl*rad, node*rad, argp*rad, nu*rad, m*rad,year,mon,day,hr,minute,sec,jd]; %change code to improve velocity - preallocate
% fprintf(outfile, ' %14.6f %8.6f %10.5f %10.5f %10.5f %10.5f %10.5f %5i%3i%3i %2i:%2i:%9.6f \n',...
% a, ecc, incl*rad, node*rad, argp*rad, nu*rad, m*rad,year,mon,day,hr,minute,sec );
%improve this using iers.org data
%Polar Motion Data December-18 2015
%http://datacenter.iers.org/eop/-/somos/5Rgv/getTX/6/bulletina-xxviii-051.txt
timezone = 0;
dut1 = 0.10536; % ut1 - utc sec
dat = leap_second; %leap second tai - utc sec
lod = 0.0015; %lod - excess length of day sec
xp = 0.0818/3600*pi/180; %xp - polar motion coefficient rad
yp = 0.2496/3600*pi/180; %yp - polar motion coefficient rad
[ut1, tut1, jdut1, utc, tai, tt, ttt, jdtt, tdb, ttdb, jdtdb ] ...
= convtime ( year, mon, day, hr, minute, sec, timezone, dut1, dat );
[r_ecef,v_ecef,a_ecef] = teme2ecef( ro',vo',[0 0 0]',ttt,jdut1,lod,xp,yp ); % acceleration no need
[latgc,latgd,lon,hellp] = ijk2ll (r_ecef); %atan22 to atan2 (I have changed) error?
output_data(n,22:23) = [lon latgd];
end %// if satrec.error == 0
n=n+1;
end %// while propagating the orbit
propagation_result{sat_n}.propagation = output_data;
end %for (sat_n=1:total_sat)
% if (idebug && (dbgfile ~= -1))
% fclose(dbgfile);
% end
% end %// if not eof
%end %// while through the input file
%save('satrec.mat','-struct','satrec');
% save('output_data.mat','output_data');
% fclose(infile);
% fclose(outfile);
fclose(error_log);
% figure
% plot3(output_data(:,2),output_data(:,3),output_data(:,4)); %3d
% figure
% polar((output_data(:,11)+output_data(:,12))*pi/180,output_data(:,9)) %ecc
% figure
% plot(output_data(:,22)*180/pi) %long
% figure
% plot(output_data(:,22)*180/pi,output_data(:,23)*180/pi) %lon vs lat
🔗 参考文献
🎈 部分理论引用网络文献,若有侵权联系博主删除
👇 关注我领取海量matlab电子书和数学建模资料
🏆团队擅长辅导定制多种科研领域MATLAB仿真,助力科研梦:
🌟 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱调度、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题、港口调度、港口岸桥调度、停机位分配、机场航班调度、泄漏源定位、冷链、时间窗、多车场等、选址优化、港口岸桥调度优化、交通阻抗、重分配、停机位分配、机场航班调度、通信上传下载分配优化
🌟 机器学习和深度学习时序、回归、分类、聚类和降维
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN|TCN|GCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类
2.10 DBN深度置信网络时序、回归预测和分类
2.11 FNN模糊神经网络时序、回归预测
2.12 RF随机森林时序、回归预测和分类
2.13 BLS宽度学习时序、回归预测和分类
2.14 PNN脉冲神经网络分类
2.15 模糊小波神经网络预测和分类
2.16 时序、回归预测和分类
2.17 时序、回归预测预测和分类
2.18 XGBOOST集成学习时序、回归预测预测和分类
2.19 Transform各类组合时序、回归预测预测和分类
方向涵盖风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、用电量预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
🌟图像处理方面
图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知
🌟 路径规划方面
旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、 充电车辆路径规划(EVRP)、 双层车辆路径规划(2E-VRP)、 油电混合车辆路径规划、 船舶航迹规划、 全路径规划规划、 仓储巡逻、公交车时间调度、水库调度优化、多式联运优化
🌟 无人机应用方面
无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配、无人机安全通信轨迹在线优化、车辆协同无人机路径规划、
🌟 通信方面
传感器部署优化、通信协议优化、路由优化、目标定位优化、Dv-Hop定位优化、Leach协议优化、WSN覆盖优化、组播优化、RSSI定位优化、水声通信、通信上传下载分配
🌟 信号处理方面
信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号、信号配时优化、心电信号、DOA估计、编码译码、变分模态分解、管道泄漏、滤波器、数字信号处理+传输+分析+去噪、数字信号调制、误码率、信号估计、DTMF、信号检测
🌟电力系统方面
微电网优化、无功优化、配电网重构、储能配置、有序充电、MPPT优化、家庭用电、电/冷/热负荷预测、电力设备故障诊断、电池管理系统(BMS)SOC/SOH估算(粒子滤波/卡尔曼滤波)、 多目标优化在电力系统调度中的应用、光伏MPPT控制算法改进(扰动观察法/电导增量法)、电动汽车充放电优化、微电网日前日内优化、储能优化、家庭用电优化、供应链优化
🌟 元胞自动机方面
交通流 人群疏散 病毒扩散 晶体生长 金属腐蚀
🌟 雷达方面
卡尔曼滤波跟踪、航迹关联、航迹融合、SOC估计、阵列优化、NLOS识别
🌟 车间调度
零等待流水车间调度问题NWFSP 、 置换流水车间调度问题PFSP、 混合流水车间调度问题HFSP 、零空闲流水车间调度问题NIFSP、分布式置换流水车间调度问题 DPFSP、阻塞流水车间调度问题BFSP
👇


















 333
333

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











