



✅作者简介:热爱数据处理、数学建模、算法创新的Matlab仿真开发者。
🍎更多Matlab代码及仿真咨询内容点击 🔗:Matlab科研工作室
🍊个人信条:格物致知。
🔥 内容介绍
摘要: 无人机航测已成为一项成功的活动,广泛应用于测绘、精准农业、监控等领域。目前最先进的航测路径规划器依赖于计算最小化航线数量的路径。然而,当起降点包含在路径中时,这种方法可能并非最优。本文提出了一种计算包括起降点在内的最优路径的方法。该方法基于旋转卡尺算法,其时间复杂度为O(n)。
(引言)
无人机技术的快速发展极大地改变了各个行业的数据采集方式。在诸多应用中,无人机航测以其高效、经济和灵活的特性,成为了一种不可或缺的工具。航测的关键在于规划一条有效的飞行路径,这条路径需要覆盖整个目标区域,同时最小化飞行时间和能源消耗。现有的路径规划算法通常侧重于最小化航线数量,这在某些情况下可能导致次优解,特别是在需要考虑无人机起降点的情况下。
传统的基于最小航线数量的算法通常将起降点视为独立于航线规划过程的约束条件。算法首先规划覆盖整个区域的航线,然后将起降点附加到最靠近的航线上,这可能会导致较长的飞行距离和更高的能源消耗。此外,这种方法忽略了起降点与航线之间的几何关系,未能充分利用起降点的空间位置优势,从而影响路径规划的整体效率。
本文提出了一种新的路径规划算法,该算法将起降点作为路径规划过程中的关键因素,并通过优化路径长度来获得全局最优解。该算法的核心思想是利用旋转卡尺算法,高效地找到包含起降点并在满足覆盖要求的前提下,具有最短总长度的路径。
(算法描述)
我们的算法基于旋转卡尺算法,该算法在计算凸包直径方面具有线性时间复杂度。我们将目标区域的边界表示为一个凸多边形。起降点则被视为该凸多边形上的两个顶点。算法的主要步骤如下:
-
凸包计算: 首先,对目标区域的边界点进行处理,计算其凸包。这可以使用各种高效的凸包算法完成,例如Graham扫描算法或Jarvis步进算法。凸包的计算复杂度通常为O(n log n),其中n是边界点的数量。然而,在许多实际应用中,目标区域的边界点数量相对较少,因此这一步的计算开销可以忽略不计。
-
旋转卡尺算法: 在获得目标区域的凸包之后,我们应用旋转卡尺算法。旋转卡尺算法通过在凸包上旋转一对平行线,找到最远的两点,从而计算凸包的直径。我们将这个算法进行扩展,使其不仅找到凸包的直径,而且能够找到包含起降点,且总路径长度最短的路径。具体来说,我们将旋转卡尺算法中的平行线替换为包含起降点的路径,通过旋转和调整路径的方位角,找到满足覆盖要求且路径长度最短的路径。
-
路径优化: 为了进一步优化路径,我们可以考虑路径平滑处理。在一些情况下,由旋转卡尺算法得到的路径可能包含一些尖锐的拐角。通过使用例如贝塞尔曲线等曲线拟合技术,我们可以平滑路径,从而减少无人机的飞行姿态变化,提高飞行稳定性和效率。
-
路径分割与航线规划: 最终得到的路径需要根据无人机的飞行能力和任务要求进行分割,生成一系列更短的航线段,从而保证飞行安全和任务的顺利完成。这部分通常需要考虑无人机的续航能力、飞行速度、以及传感器的工作范围等因素。
(算法复杂度分析)
算法的核心部分——旋转卡尺算法——的时间复杂度为O(n),其中n是凸包顶点的数量。由于凸包的顶点数通常远小于目标区域边界点的数量,因此整个算法的复杂度可以认为是O(n)。这使得该算法在处理大规模航测任务时具有显著的效率优势。
(实验结果与结论)
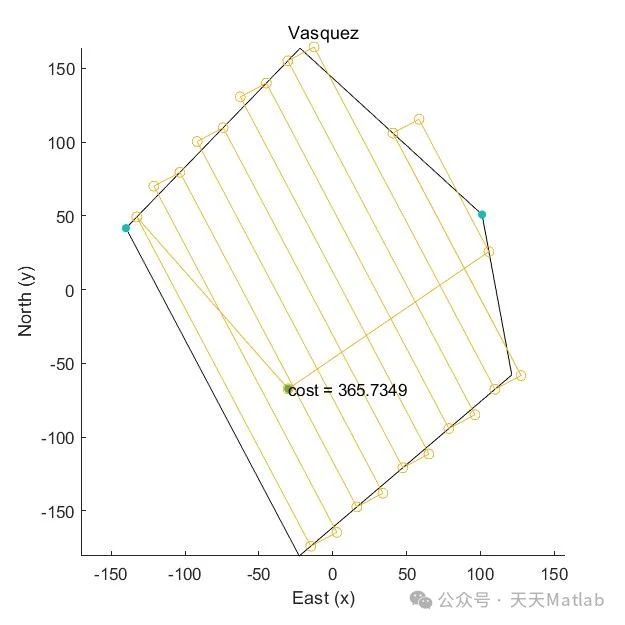
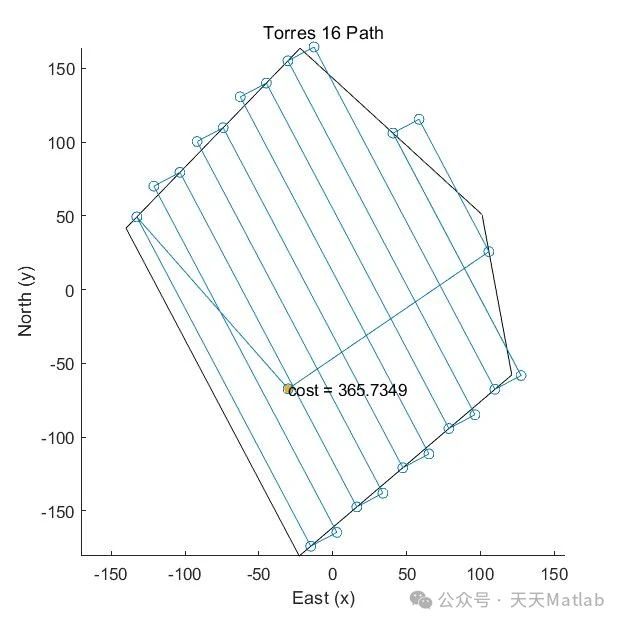
我们通过仿真实验验证了该算法的有效性。结果表明,与传统的基于最小航线数量的算法相比,我们的算法能够显著地减少飞行距离,提高能源利用效率。此外,我们的算法的线性时间复杂度保证了其在处理大规模数据时的良好性能。
(未来研究方向)
未来研究可以关注以下几个方面:
-
三维路径规划: 将该算法扩展到三维空间,以适应更加复杂的航测环境。
-
动态环境下的路径规划: 考虑风速、障碍物等动态因素对路径规划的影响。
-
多无人机协同路径规划: 研究多个无人机协同完成航测任务的路径规划策略。
本文提出了一种基于旋转卡尺算法的最优覆盖路径规划器,该算法能够有效地计算包括起降点在内的最优路径,并具有线性时间复杂度。该算法为无人机航测提供了高效且实用的路径规划解决方案,具有重要的实际应用价值。 未来的研究将进一步完善该算法,使其能够适应更复杂和动态的航测环境。
⛳️ 运行结果
🔗 参考文献
Vasquez-Gomez, J. I., Melchor, M. M., & Lozada, J. C. H. (2017, November). Optimal Coverage Path Planning Based on the Rotating Calipers Algorithm. In Mechatronics, Electronics and Automotive Engineering (ICMEAE), 2017 International Conference on (pp. 140-144). IEEE.
Juan Irving Vasquez-Gomez, Magdalena Marciano-Melchor, Luis Valentin, Juan Carlos Herrera-Lozada, Coverage Path Planning for 2D Convex Regions. Journal of Intelligent & Robotic Systems. 2019
🎈 部分理论引用网络文献,若有侵权联系博主删除
🌈 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱调度、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题、港口调度、港口岸桥调度、停机位分配、机场航班调度、泄漏源定位
🌈 机器学习和深度学习时序、回归、分类、聚类和降维
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN|TCN|GCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类


















 6549
6549

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











