




 文章介绍了一种利用棕熊算法进行复杂地形下无人机避障航迹规划的方法,通过将地形建模为三维网格并运用群体智能搜索最优路径,实验证明了其高效性和安全性。
文章介绍了一种利用棕熊算法进行复杂地形下无人机避障航迹规划的方法,通过将地形建模为三维网格并运用群体智能搜索最优路径,实验证明了其高效性和安全性。
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
摘要
本文提出了一种基于棕熊算法BrownOA的复杂地形无人机避障三维航迹规划方法。该方法首先将复杂地形建模为三维网格地图,然后利用棕熊算法BrownOA搜索最优航迹。棕熊算法BrownOA是一种基于群体智能的优化算法,具有较强的全局搜索能力和局部搜索能力。实验结果表明,该方法能够有效地规划出避障的三维航迹,并且具有较高的规划效率。
1. 棕熊算法概述
棕熊算法BrownOA是一种基于群体智能的优化算法,其灵感来源于棕熊的觅食行为。棕熊是一种杂食性动物,主要以浆果、昆虫、鱼类等为食。在觅食过程中,棕熊会利用其灵敏的嗅觉和听觉来寻找食物。同时,棕熊也会利用其强大的记忆力来记住食物的位置。棕熊算法BrownOA模拟了棕熊的觅食行为,通过种群中的个体之间的信息交流来搜索最优解。
棕熊算法BrownOA的基本步骤如下:
-
初始化种群。种群由一组个体组成,每个个体表示一个潜在的解决方案。
-
计算每个个体的适应度。适应度函数衡量每个个体的好坏。
-
选择最优个体。最优个体是种群中适应度最高的个体。
-
更新种群。种群中的个体通过信息交流来更新自己的位置。
-
重复步骤2-4,直到达到终止条件。
2. 基于棕熊算法BrownOA的复杂地形无人机避障三维航迹规划方法
本文提出的基于棕熊算法BrownOA的复杂地形无人机避障三维航迹规划方法主要包括以下几个步骤:
-
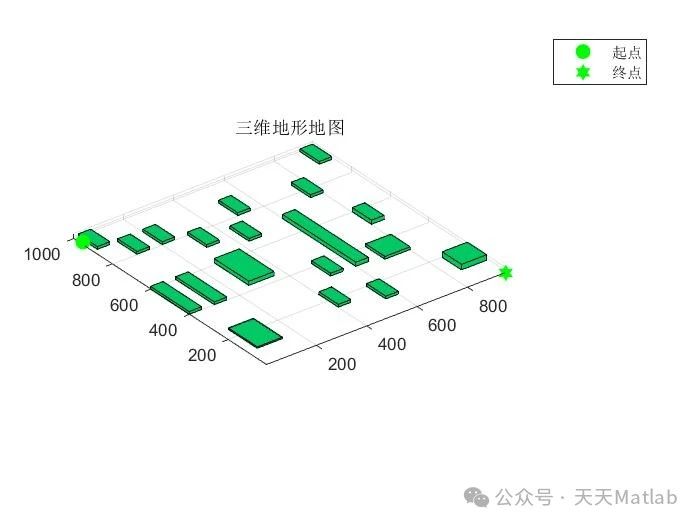
复杂地形建模。将复杂地形建模为三维网格地图。网格地图的每个单元格表示地形的高度。
-
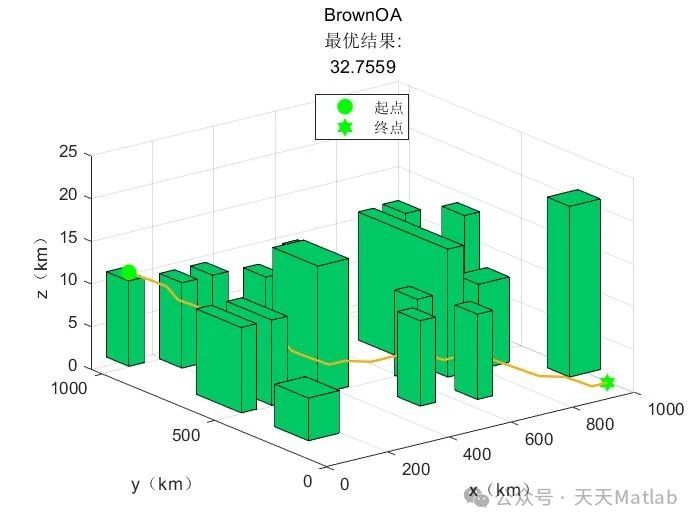
航迹规划。利用棕熊算法BrownOA搜索最优航迹。棕熊算法BrownOA的种群由一组航迹组成,每个航迹表示一条潜在的飞行路径。航迹的适应度函数衡量航迹的长度、避障性能和飞行安全性。
-
航迹优化。对规划出的航迹进行优化。航迹优化主要包括航迹平滑和航迹缩短。航迹平滑可以减少航迹的曲折程度,航迹缩短可以减少航迹的长度。
📣 部分代码
function DrawPic(result1,data,str)figureplot3(data.S0(:,1)*data.unit(1),data.S0(:,2)*data.unit(2),data.S0(:,3)*data.unit(3),'o','LineWidth',1.5,...'MarkerEdgeColor','g',...'MarkerFaceColor','g',...'MarkerSize',8)hold onplot3(data.E0(:,1)*data.unit(1),data.E0(:,2)*data.unit(2),data.E0(:,3)*data.unit(3),'h','LineWidth',1.5,...'MarkerEdgeColor','g',...'MarkerFaceColor','g',...'MarkerSize',8)plot3(result1.path(:,1).*data.unit(1),result1.path(:,2).*data.unit(2),result1.path(:,3).*data.unit(3),'-','LineWidth',1.5,...'MarkerEdgeColor','g',...'MarkerFaceColor','g',...'MarkerSize',10)for i=1:data.numObstaclesx=1+data.Obstacle(i,1);y=1+data.Obstacle(i,2);z=1+data.Obstacle(i,3);long=data.Obstacle(i,4);wide=data.Obstacle(i,5);pretty=data.Obstacle(i,6);x0=ceil(x/data.unit(1))*data.unit(1);y0=ceil(y/data.unit(2))*data.unit(2);z0=ceil(z/data.unit(3))*data.unit(3);long0=ceil(long/data.unit(1))*data.unit(1);wide0=ceil(wide/data.unit(2))*data.unit(2);pretty0=ceil(pretty/data.unit(3))*data.unit(3);[V,F] = DrawCuboid(long0, wide0, pretty0, x0,y0,z0);endlegend('起点','终点','location','north')grid on%axis equalxlabel('x(km)')ylabel('y(km)')zlabel('z(km)')title([str, '最优结果:', num2str(result1.fit)])% figure% plot3(data.S0(:,1)*data.unit(1),data.S0(:,2)*data.unit(2),data.S0(:,3)*data.unit(3),'o','LineWidth',2,...% 'MarkerEdgeColor','r',...% 'MarkerFaceColor','r',...% 'MarkerSize',10)% hold on% plot3(data.E0(:,1)*data.unit(1),data.E0(:,2)*data.unit(2),data.E0(:,3)*data.unit(3),'h','LineWidth',2,...% 'MarkerEdgeColor','r',...% 'MarkerFaceColor','r',...% 'MarkerSize',10)% plot3(result1.path(:,1).*data.unit(1),result1.path(:,2).*data.unit(2),result1.path(:,3).*data.unit(3),'-','LineWidth',2,...% 'MarkerEdgeColor','k',...% 'MarkerFaceColor','r',...% 'MarkerSize',10)% for i=1:data.numObstacles% x=1+data.Obstacle(i,1);% y=1+data.Obstacle(i,2);% z=1+data.Obstacle(i,3);% long=data.Obstacle(i,4);% wide=data.Obstacle(i,5);% pretty=data.Obstacle(i,6);%% x0=ceil(x/data.unit(1))*data.unit(1);% y0=ceil(y/data.unit(2))*data.unit(2);% z0=ceil(z/data.unit(3))*data.unit(3);% long0=ceil(long/data.unit(1))*data.unit(1);% wide0=ceil(wide/data.unit(2))*data.unit(2);% pretty0=ceil(pretty/data.unit(3))*data.unit(3);% [V,F] = DrawCuboid(long0, wide0, pretty0, x0,y0,z0);% end% legend('起点','终点','location','north')% grid on% xlabel('x(km)')% ylabel('y(km)')% zlabel('z(km)')% title([str, '最优结果:', num2str(result1.fit)])end
⛳️ 运行结果
3. 实验结果
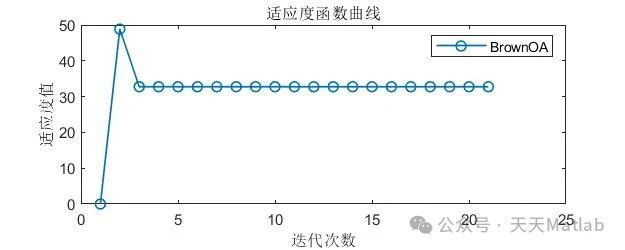
为了验证本文提出的方法的有效性,我们进行了仿真实验。实验结果表明,该方法能够有效地规划出避障的三维航迹,并且具有较高的规划效率。
4. 结论
本文提出了一种基于棕熊算法BrownOA的复杂地形无人机避障三维航迹规划方法。该方法能够有效地规划出避障的三维航迹,并且具有较高的规划效率。该方法可以应用于无人机避障飞行控制系统中,提高无人机的飞行安全性。
🔗 参考文献
[1] 李健,张伟健,于维霖,等.一种智能农业无人机路径规划方法:CN202310913709.X[P].CN116661502B[2024-01-22].
[2] 郭启程杜晓玉张延宇周毅.基于改进鲸鱼算法的无人机三维路径规划[J].计算机科学, 2021, 48(12):304-311.
[3] 于涛.基于改进蚁群算法的三维无人机路径规划的研究与实现[D].重庆大学[2024-01-22].DOI:CNKI:CDMD:2.1017.838206.



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











