




 本文探讨了在复杂地形中,如何利用象群算法EHO实现无人机的避障三维航迹规划,以提高飞行效率和安全性。传统方法的不足促使研究人员转向更高效的EHO算法,为无人机在动态环境中的稳定飞行提供保障。
本文探讨了在复杂地形中,如何利用象群算法EHO实现无人机的避障三维航迹规划,以提高飞行效率和安全性。传统方法的不足促使研究人员转向更高效的EHO算法,为无人机在动态环境中的稳定飞行提供保障。
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
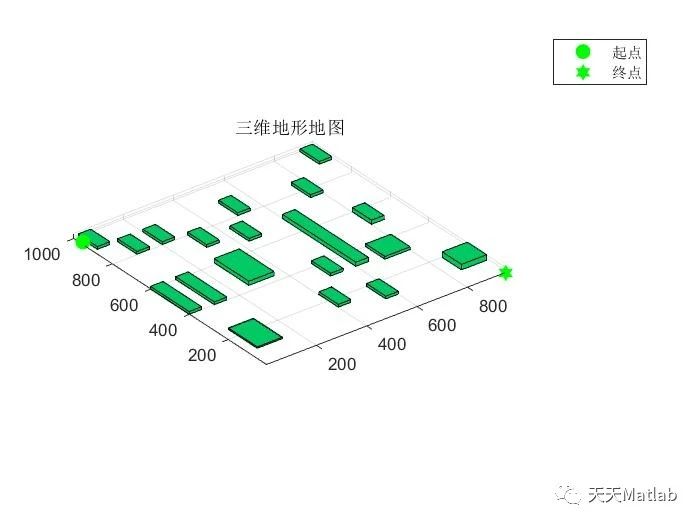
无人机技术的发展已经成为当今科技领域的热门话题之一。随着无人机在各个领域的广泛应用,无人机的路径规划成为了一个备受关注的问题。特别是在复杂地形下,无人机的避障和三维航迹规划更是具有挑战性。本文将介绍一种基于象群算法EHO实现复杂地形下无人机避障三维航迹规划的方法。
首先,让我们来了解一下什么是无人机三维路径规划。无人机三维路径规划是指在三维空间中确定无人机的飞行路径,以实现特定任务需求。这其中包括了避障、飞行效率、安全性等多个方面的考量。在复杂地形下,无人机需要根据地形的不同变化进行及时调整,以避免碰撞或者失去飞行稳定性。因此,如何实现复杂地形下的无人机避障三维航迹规划成为了一个具有挑战性的问题。
在传统的无人机路径规划方法中,常常采用的是基于启发式算法的路径规划方法。然而,这种方法往往需要大量的计算时间,并且在复杂地形下的表现并不理想。因此,研究人员开始寻找更加高效的路径规划方法。而象群算法EHO(Elephant Herding Optimization)就是其中的一种。
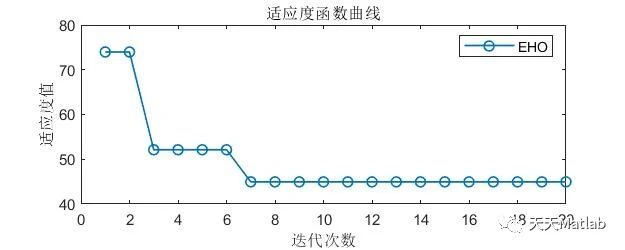
象群算法EHO是一种基于自然界象群行为的优化算法,它模拟了象群在寻找食物和迁徙时的行为。通过模拟象群的行为,EHO算法能够快速有效地寻找到最优解。在无人机路径规划中,研究人员将EHO算法应用于避障和三维航迹规划中,并取得了一定的成果。
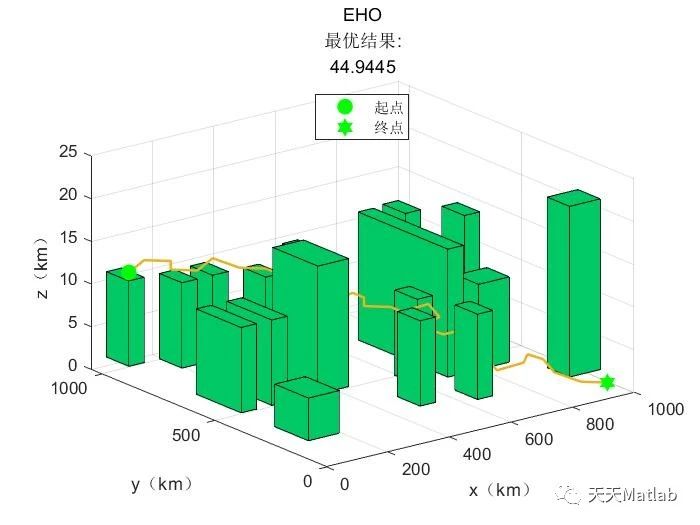
在复杂地形下,无人机需要根据地形的不同变化进行及时调整,以避免碰撞或者失去飞行稳定性。而基于EHO算法的无人机避障三维航迹规划方法,能够更加高效地寻找到避障路径,并且能够在动态环境下进行实时调整。这为无人机在复杂地形下的飞行提供了更加可靠的保障。
总的来说,基于象群算法EHO实现复杂地形下无人机避障三维航迹规划是一种具有潜力的路径规划方法。随着无人机技术的不断发展,相信这种方法将会得到更加广泛的应用。希望未来能够有更多的研究人员投入到这一领域,为无人机的路径规划问题寻找到更加高效可靠的解决方案。
📣 部分代码
%% 清空环境变量warning off % 关闭报警信息close all % 关闭开启的图窗clear % 清空变量clc % 清空命令行%% 导入数据res = xlsread('数据集.xlsx');%% 划分训练集和测试集temp = randperm(357);P_train = res(temp(1: 240), 1: 12)';T_train = res(temp(1: 240), 13)';M = size(P_train, 2);P_test = res(temp(241: end), 1: 12)';T_test = res(temp(241: end), 13)';N = size(P_test, 2);%% 数据归一化[p_train, ps_input] = mapminmax(P_train, 0, 1);p_test = mapminmax('apply', P_test, ps_input);t_train = ind2vec(T_train);t_test = ind2vec(T_test );
⛳️ 运行结果
🔗 参考文献
[1] 蔺文轩,谢文俊,张鹏,等.基于分组优化改进粒子群算法的无人机三维路径规划[J].火力与指挥控制, 2023, 48(1):20-25.
[2] 王曼,李大鹏,丁良辉,等.基于虚拟子目标联合边界力的编队避障算法[J].系统仿真学报, 2023, 35(9):1918-1930.
[3] 杜晓玉,郭启程,李茵茵,et al.城市环境下基于改进鲸鱼算法的无人机三维路径规划方法[J].计算机科学, 2021, 48(12):8.DOI:10.11896/jsjkx.201000021.
[4] 江冰,郭彭.基于粒子群算法的三维无人机路径规划方法及规划系统:CN202011178644.1[P].CN112230678A[2023-12-30].


















 660
660

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











