




 文章探讨了无线传感器网络中如何通过采用基于粒子群优化的LEACH协议来平衡安全性和能源消耗。该方法通过有效选择簇头节点和优化数据传输,减少了能量消耗,延长了网络寿命。
文章探讨了无线传感器网络中如何通过采用基于粒子群优化的LEACH协议来平衡安全性和能源消耗。该方法通过有效选择簇头节点和优化数据传输,减少了能量消耗,延长了网络寿命。
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
WSN(无线传感器网络)由部署在环境中的大量不可充电的微型传感器节点组成,这些节点感知数据并将其传输到基站。一旦传感器的能量耗尽,传感器就会变得毫无用处,从而缩短网络的整体寿命。此外,无线传感器网络还可以用于数据机密应用,例如通信系统,这在这种情况下至关重要。然而,提高安全性和降低能耗之间始终需要权衡。有多种算法可以提供安全性,但大多数算法都具有复杂性。随着安全算法复杂度的增加,能量消耗也随之增加。
LEACH协议通过将传感器节点分成簇(cluster),并由簇头(cluster head)负责数据的收集和传输,以减少整个网络的能量消耗。然而,LEACH协议存在一些问题,如簇头节点的选择不均衡、能量消耗不平衡等。为了解决这些问题,本文提出了一种基于粒子群算法(Particle Swarm Optimization,PSO)改进的LEACH协议算法。
粒子群算法是一种模拟群体行为的优化算法,通过模拟鸟群或鱼群等自然界中的群体行为,来寻找最优解。在本文中,我们将粒子群算法应用于LEACH协议中,以改进能量均衡和高效性。
以下是基于粒子群算法改进的LEACH协议算法步骤:
-
初始化:设置网络中的传感器节点数量、簇头节点数量、能量阈值等参数,并随机选择初始簇头节点。
-
粒子群初始化:为每个传感器节点创建一个粒子,并随机初始化粒子的位置和速度。
-
簇头选择:根据粒子的位置和速度,确定每个传感器节点是否成为簇头节点。通过计算每个传感器节点到其周围传感器节点的距离和能量消耗等指标,选择最优的传感器节点作为簇头节点。
-
簇形成:将非簇头节点分配到最近的簇头节点,形成簇。
-
数据传输:簇头节点负责收集和传输簇内传感器节点的数据。通过无线通信将数据传输到基站或其他簇头节点。
-
能量更新:根据数据传输的能量消耗,更新每个传感器节点的能量。
-
粒子更新:根据粒子群算法的更新规则,更新粒子的位置和速度。
-
重复执行步骤3至步骤7,直到达到预定的迭代次数或网络中的能量消耗达到阈值。
通过基于粒子群算法改进的LEACH协议,能够实现更好的能量均衡和高效性。粒子群算法的引入使得簇头节点的选择更加均衡,能量消耗更加平衡。通过簇的形成和数据传输,可以减少网络中的能量消耗,延长网络的寿命。
总结而言,基于粒子群算法改进的LEACH协议是一种能够提高能量均衡和高效性的协议算法。通过合理选择簇头节点和优化数据传输,能够减少能量消耗,延长网络的寿命。未来的研究可以进一步探索粒子群算法在其他WSN协议中的应用,以提高网络的性能和稳定性。
📣 部分代码
function GlobalBest=pso2(clusterModel)%clusterModel.clusterNode.countCHs%model=newNetwork1(100, 100, 50, 175);%model.n=3;nVar=clusterModel.clusterNode.countCHs; % Number of Decision VariablesVarSize=[1 nVar];VarMin=0; % Lower Bound of VariablesVarMax=1; % Upper Bound of Variables%model.Yard%% PSO ParametersMaxIt=50; % Maximum Number of Iterations%r = 50;nPop=50; % Population Size (Swarm Size)w=1; % Inertia Weightwdamp=0.98; % Inertia Weight Damping Ratioc1=1.5; % Personal Learning Coefficientc2=1.5; % Global Learning Coefficientalpha=0.1;VelMax=alpha*(VarMax-VarMin); % Maximum VelocityVelMin=-VelMax; % Minimum Velocity% Minimum Velocity%% Initialization% Create Empty Particle Structureempty_particle.Priority=[];empty_particle.Velocity=[];empty_particle.Cost=[];empty_particle.Best.Priority=[];empty_particle.Best.Cost=[];empty_particle.Best.Path=[];empty_particle.Path=[];ep.Priority=[];ep.Cost=inf;ep.Path=[];% Initialize Global Best% GlobalBest.Priority=zeros(model.numNode-1,model.numNode);% %GlobalBest.Path=repmat([],model.numNode-1,1);% for k = 1:model.numNode-1% GlobalBest.Path(k) = [];%% endparticle=repmat(empty_particle,clusterModel.clusterNode.countCHs-1,1);GlobalBest=repmat(ep,clusterModel.clusterNode.countCHs-1,1);%GlobalBest.Cost=inf( model.numNode-1, 1);%pause;% p1.Priority = [];% p1.Cost = [];% p1.Path = [];% GlobalBest.Best = repmat(p1, model.numNode-1,1);% Create Particles Matrix% Initialization Loopfor i=1:clusterModel.clusterNode.countCHs-1fflag=0;for j=1:2fflag=0;particle(i).Priority = rand(1,clusterModel.clusterNode.countCHs);% Initialize Velocityparticle(i).Velocity = zeros(VarSize);% Evaluationparticle(i).Path = gen1(particle(i).Priority, clusterModel, i);% particle(i).Path[particle(i).Cost]=CostFunction(particle(i).Path, clusterModel);% Update Personal Bestif(j==1)particle(i).Best.Priority=particle(i).Priority;particle(i).Best.Cost=particle(i).Cost;particle(i).Best.Path=particle(i).Path;pr = particle(i).Priority;c = particle(i).Cost;p = particle(i).Path;elseif(particle(i).Best.Cost>particle(i).Cost)particle(i).Best.Priority=particle(i).Priority;particle(i).Best.Cost=particle(i).Cost;particle(i).Best.Path=particle(i).Path;fflag=1;endend% Update Global Bestif particle(i).Best.Cost<GlobalBest(i).Cost% length(GlobalBest.Priority(i,:))% length(particle(i).Best.Priority)GlobalBest(i).Priority=particle(i).Best.Priority;GlobalBest(i).Cost=particle(i).Best.Cost;GlobalBest(i).Path=particle(i).Best.Path;if(isempty(GlobalBest(i).Priority))i%pause;endendend% pauseif(fflag==1)particle(i).Priority=pr;particle(i).Cost=c;particle(i).Path=p;endend% Array to Hold Best Cost Values at Each IterationBestCost=zeros(MaxIt,clusterModel.clusterNode.countCHs-1);%pause;for j=1:clusterModel.clusterNode.countCHs-1if (isempty(GlobalBest(j).Priority))j%pause;endend%% PSO Main Loop% sop = 0;% for iit = 1:rfor it=1:MaxItfor i=1:clusterModel.clusterNode.countCHs-1if(clusterModel.nodeArch.dead(clusterModel.clusterNode.no(i)) ~= 1)% it%% i%% particle(i).Velocity% particle(i).Best.Priority% particle(i).Priorityif(it == 1 && isempty(GlobalBest(i).Priority))GlobalBest(i).Priority=particle(i).Best.Priority;GlobalBest(i).Cost=particle(i).Best.Cost;GlobalBest(i).Path=particle(i).Best.Path;end% pause;% if(i==1)% particle(i).Velocity%% end% Update Velocityparticle(i).Velocity = w*particle(i).Velocity ...+ c1*rand(VarSize).*(particle(i).Best.Priority - particle(i).Priority) ...+ c2*rand(VarSize).*(GlobalBest(i).Priority - particle(i).Priority);% if(i==1)% % c1*rand(VarSize).*(particle(i).Best.Priority - particle(i).Priority)% % c2*rand(VarSize).*(GlobalBest(i).Priority - particle(i).Priority)%% particle(i).Velocity%% end% Update Velocity Boundsparticle(i).Velocity = max(particle(i).Velocity,VelMin);particle(i).Velocity = min(particle(i).Velocity,VelMax);% if(i==1)% particle(i).Velocity% pause;% end% if(i==1)% particle(i).Priority% end% Update Positionparticle(i).Priority = particle(i).Priority + particle(i).Velocity;% Velocity MirroringOutOfTheRange=(particle(i).Priority<VarMin | particle(i).Priority>VarMax);particle(i).Velocity(OutOfTheRange)=-particle(i).Velocity(OutOfTheRange);% Update Position Boundsparticle(i).Priority = max(particle(i).Priority,VarMin);particle(i).Priority = min(particle(i).Priority,VarMax);% if(i==1)% particle(i).Priority% end% if(i==1)% particle(i).Path% endparticle(i).Path = gen2(particle(i).Priority, clusterModel, i);% particle(i).Path% it% i% if(i==1)% particle(i).Path% end% i% particle(i).Path%% if(i==1)% particle(i).Cost% end% Evaluation[particle(i).Cost]=CostFunction(particle(i).Path, clusterModel);% if(i==1)% particle(i).Cost% end% Update Personal Bestif (particle(i).Cost<particle(i).Best.Cost)particle(i).Best.Priority=particle(i).Priority;particle(i).Best.Cost=particle(i).Cost;particle(i).Best.Path=particle(i).Path;% Update Global Bestif (particle(i).Best.Cost<GlobalBest(i).Cost)GlobalBest(i).Priority=particle(i).Best.Priority;GlobalBest(i).Cost=particle(i).Best.Cost;GlobalBest(i).Path=particle(i).Best.Path;%GlobalBest.Cost(i,:)=particle(i).Best.Cost;endend% if(i == 1)% GlobalBest(i).Cost% GlobalBest(i).Path% % particle(i).Best.Cost% endendBestCost(it,i) = GlobalBest(i).Cost;end% Update Best Cost Ever Found% BestCost(it)=GlobalBest.Cost;% BestCost(it)% Inertia Weight Dampingw=w*wdamp;% % Show Iteration Information% if GlobalBest.Sol.IsFeasible% Flag=' *';% else% Flag=[', Violation = ' num2str(GlobalBest.Sol.Violation)];% end% disp(['Iteration ' num2str(it) ': Best Cost = ' num2str(BestCost(it)) Flag]);% Plot Solution% figure(1);% PlotSolution(GlobalBest.Sol,model);% pause(0.01);% pause;%itend% for k = 1:model.numNode-1% GlobalBest(k).Cost% end%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% model=dissEnergy(GlobalBest, model);% nod = sum(model.dead);% noda(iit) = nod;% disp('Dead Nodes:')% disp(nod)% sop = sop + (model.numNode-1-nod);% sopa(iit) = sop;% disp('Total Packets:')% disp(sop)% disp('Total Energy:')% model.Tenergy% enea(iit) = model.Tenergy;% %model.dead% iit% %pause;%% createfigure(1:iit, enea, sopa, noda);%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%end
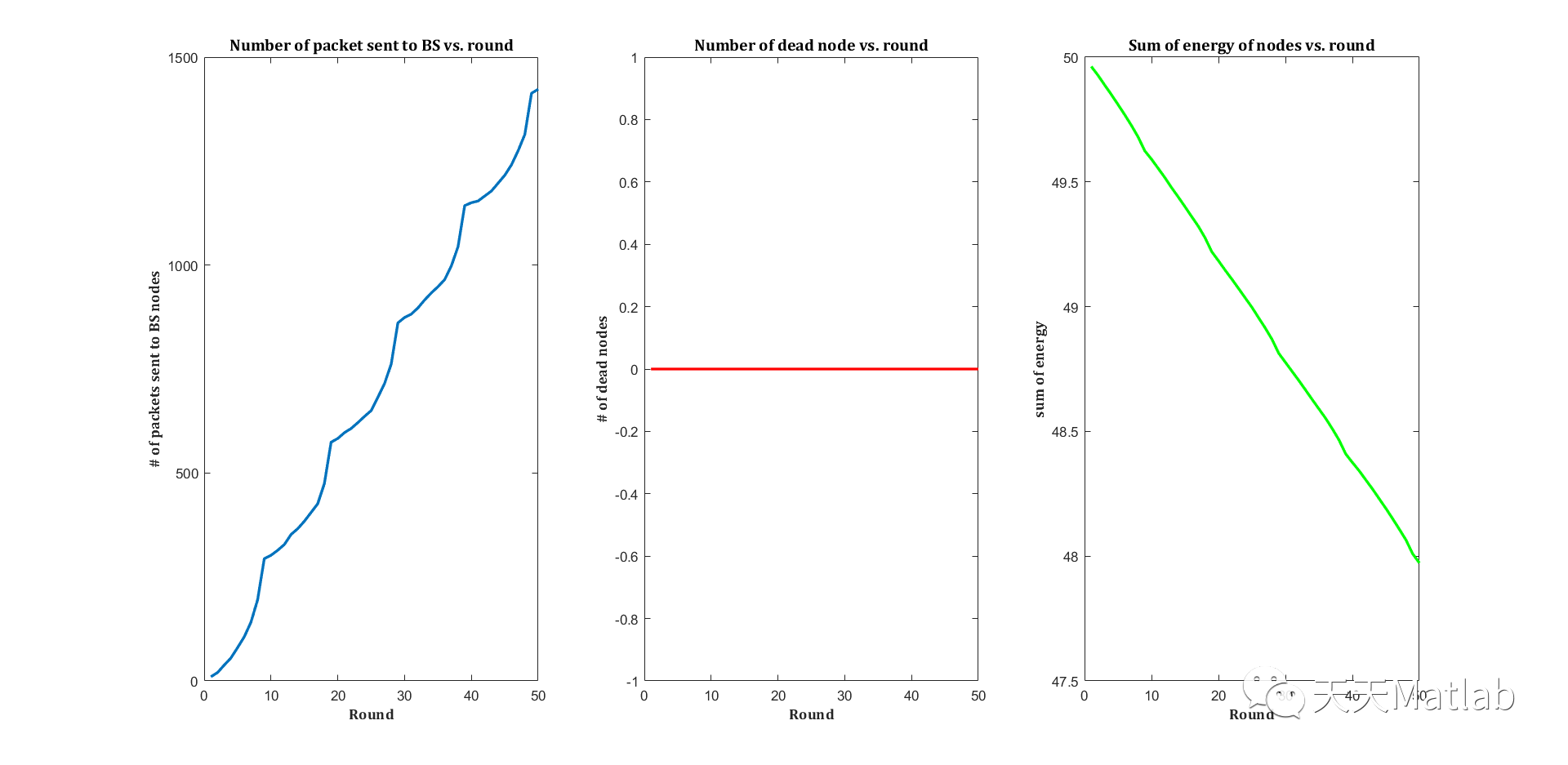
⛳️ 运行结果
🔗 参考文献
Kommuru, K. Jaya Shankar Reddy, et al. “A Novel Approach to Balance the Trade-Off between Security and Energy Consumption in WSN.” 2018 2nd International Conference on Micro-Electronics and Telecommunication Engineering (ICMETE), IEEE, 2018, doi:10.1109/icmete.2018.00030.


















 170
170

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











