




 文章介绍了采用现代控制理论中的LQR线性二次型调节器与传统PID控制器相结合,设计四旋翼无人机的双回路闭环控制系统。通过内环LQR控制器优化动态性能,外环PID控制器确保模型精度,以提高飞行稳定性和控制精度。实验结果证明了设计的有效性。
文章介绍了采用现代控制理论中的LQR线性二次型调节器与传统PID控制器相结合,设计四旋翼无人机的双回路闭环控制系统。通过内环LQR控制器优化动态性能,外环PID控制器确保模型精度,以提高飞行稳定性和控制精度。实验结果证明了设计的有效性。
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
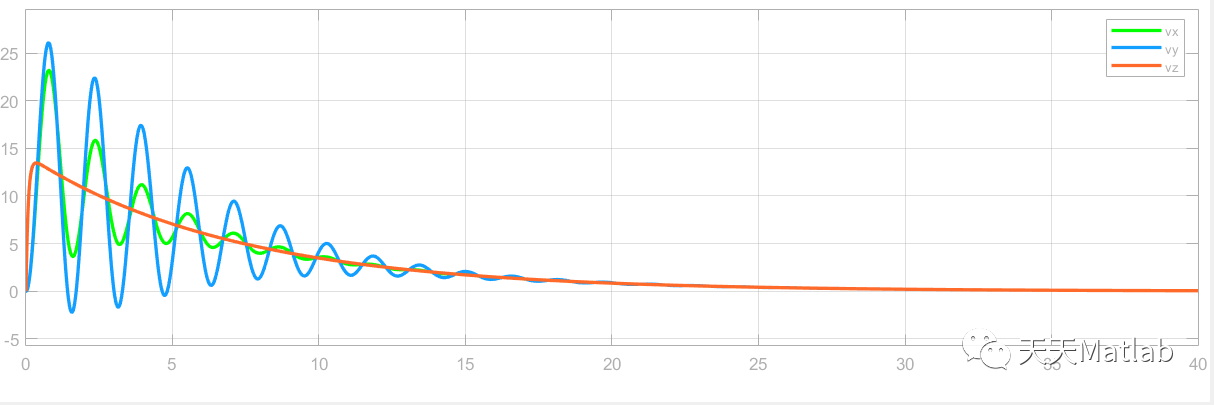
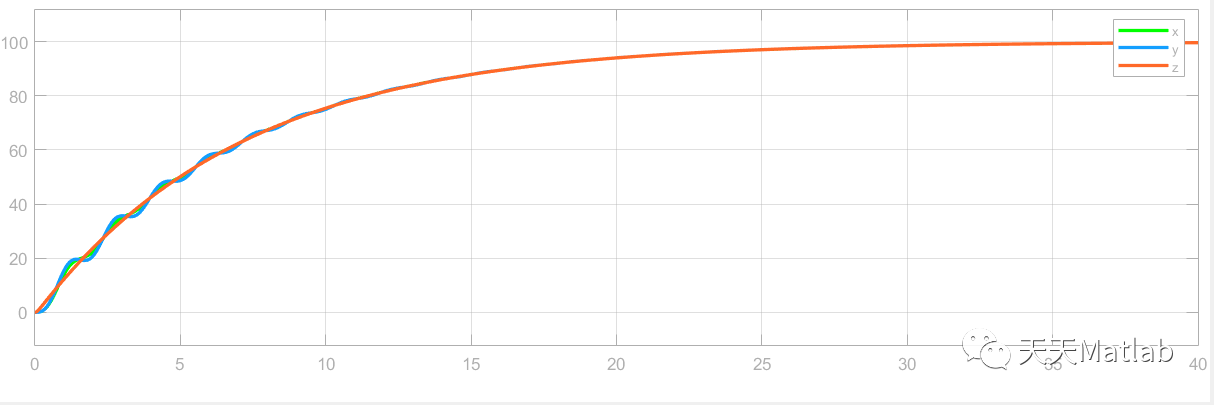
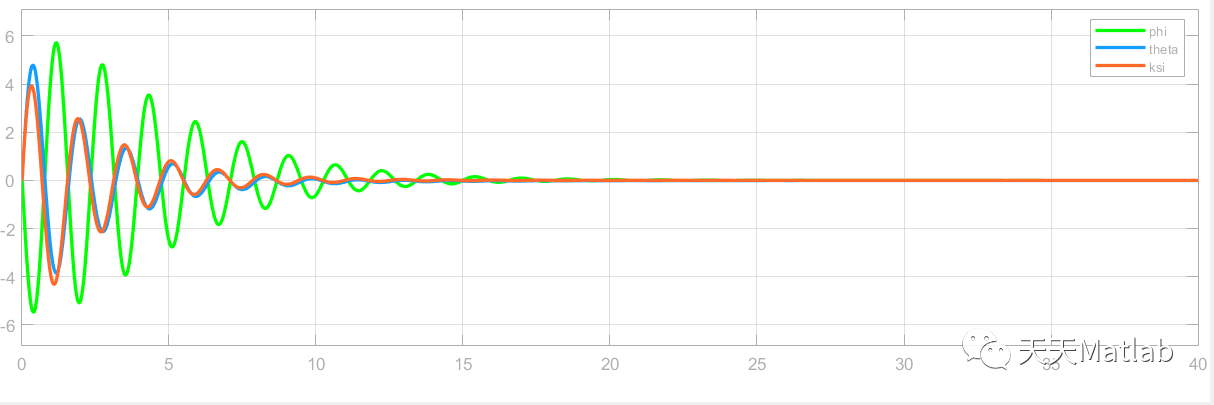
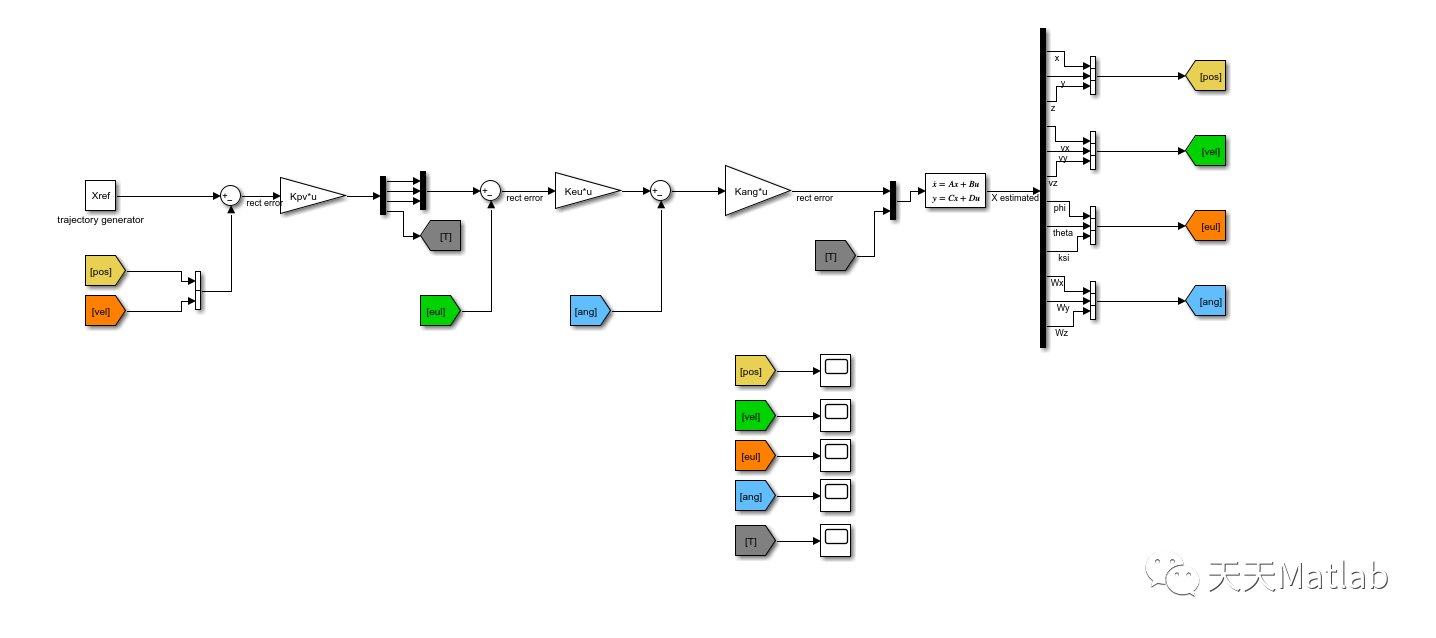
为提高四旋翼无人机的飞行稳定性,无人飞行器控制系统的鲁棒性和控制精度,以建立的四旋翼无人机飞行控制系统模型为基础,采用现代控制理论与传统控制论相结合的方法,针对姿态角速率,姿态角分别设计内环LQR(线性二次型调节器)控制器,及外环PID控制的双回路闭环控制器.充分利用PID控制器易于掌握且对模型要求精度低,LQR控制器能改善内回路的动态特性和稳态性能的特点,完成四旋翼无人机的飞行控制.通过实验遴选该双闭环控制器相关参数并进行优化,实验结果表明所设计的双回路控制器控制性能指标良好.
基于线性二次型调节器(Linear Quadratic Regulator,LQR)可以实现无人机的飞行控制。LQR是一种经典的优化控制方法,通过使用状态反馈和状态估计,以最小化给定性能指标为目标,设计飞行控制器。
以下是基于LQR实现无人机飞行控制的基本步骤:
-
系统建模:需要对无人机的动力学进行建模,包括考虑飞行器的运动方程、状态空间表示等。这可以通过多旋翼或固定翼飞行器的物理特征和运数学模型。
-
状态空间表示:将系统的运动方程转化为状态空间形式,得到状态方程: ẋ = Ax + Bu 其中,x是状态向量,A和B是系统的状态矩阵。
-
性能评价指标:定义评价指标,如飞行稳定性、姿态跟踪精度等。根据指标选择适当的性能函数,常用的是二次型性能函数。
-
设计LQR控制器:根据系统模型和性能指标,设计LQR控制器的增益矩阵K。LQR通过最小化状态误差和控制输入的二次代价函数来获得最优控制策略。使用方法,可以通过求解Riccati方程或优化算法来计算K矩阵。
-
状态反馈控值,使用状态反馈控制律: u = -Kx 这将利用LQR设计的增益矩阵对系统进行控制。其中,u是控制输入向量。
-
闭环控制:将状态反馈控制与状态估计器结合,实现无人机的闭环控制。通过续地测量、更新和修正状态,以实现稳定的飞行控制。
⛄ 部分代码
%% declarationscT = 1.3529e-06 ;cQ = 2.1113*1e-08 ;l = 110*1e-3 ;lp = sqrt(2)/2*l ;m = 0.536 ;g = 9.81 ;rho_ground = 1.4 ;rotor_radius = 6.0*1e-2 ;hauteur_rotor = 29.3*1e-3 ;Ix = 0.029125 ;Iy = 0.029125 ;Iz = 0.055225 ;Kv_motor = 1750 ;Kv_motor_rad = Kv_motor*2*pi/60 ;km = 1/Kv_motor_rad ;Jr = 1.2991*1e-05 ;R = 0.07 ;U_sat = 12 ;Mx = [ cT cT cT cT ;-cT*lp cT*lp cT*lp -cT*lp ;-cT*lp -cT*lp cT*lp cT*lp ;cQ -cQ cQ -cQ ] ;%% Dynamic systemA = [0 0 0 1 0 0 0 0 0 0 0 0; %10 0 0 0 1 0 0 0 0 0 0 0; %20 0 0 0 0 1 0 0 0 0 0 0; %30 0 0 0 0 0 0 g 0 0 0 0; %40 0 0 0 0 0 -g 0 0 0 0 0; %50 0 0 0 0 0 0 0 0 0 0 0; %60 0 0 0 0 0 0 0 0 1 0 1; %70 0 0 0 0 0 0 0 0 0 1 0; %80 0 0 0 0 0 0 0 0 0 1 1; %90 0 0 0 0 0 0 0 0 0 (Iz-Iy)/Ix (Iz-Iy)/Ix; %100 0 0 0 0 0 0 0 0 (Ix-Iz)/Iy 0 (Ix-Iz)/Iy; %110 0 0 0 0 0 0 0 0 (Iy-Ix)/Iz (Iy-Ix)/Iz 0; %12];B = [ 0 0 0 0;0 0 0 0;0 0 0 0;0 0 0 0;0 0 0 0;0 0 0 1/m;0 0 0 0;0 0 0 0;0 0 0 0;1/Ix 0 0 0;0 1/Iy 0 0;0 0 1/Iz 0;];helix = [];Xeq = [100 100 100 0 0 0 0 0 0 0 0 0];Xref = [100 100 100 0 0 0 ];%% Position velocityApv = [ 0 0 0 1 0 0;0 0 0 0 1 0;0 0 0 0 0 1;0 0 0 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0;];Bpv = [ 0 0 0 0;0 0 0 0;0 0 0 0;0 g 0 0;-g 0 0 0;0 0 0 1/m;];Qpv = [1 0 0 0 0 0;0 1 0 0 0 0;0 0 1 0 0 0;0 0 0 50 0 0;0 0 0 0 50 0;0 0 0 0 0 50];Rpv = [20 0 0 0;0 20 0 0;0 0 1 0;0 0 0 1];[Kpv,S,E] = lqr(Apv,Bpv,Qpv,Rpv);%% Angle velocityAang = zeros(3,3);Bang = [1/Ix 0 0;0 1/Iy 0;0 0 1/Iz;];Qang = [1 0 0;0 1 0;0 0 1];Rang = [0.05 0 0;0 0.05 0;0 0 0.05];[Kang,S,E] = lqr(Aang,Bang,Qang,Rang);%% Euler anglesAeu = zeros(3,3);Beu = eye(3);Qeu = [1 0 0;0 1 0;0 0 1];Reu = [1 0 0;0 1 0;0 0 1];[Keu,S,E] = lqr(Aeu,Beu,Qeu,Reu);
⛄ 运行结果
⛄ 参考文献
[1] 马敏,许中冲,常辰飞,等.基于PID和LQR的四旋翼无人机控制系统研究[J].测控技术, 2016, 35(10):5.DOI:10.3969/j.issn.1000-8829.2016.10.011.
[2] 黄丹,周少武,吴新开,等.基于LQR最优调节器的倒立摆控制系统[J].微计算机信息, 2004, 20(2):3.DOI:10.3969/j.issn.1008-0570.2004.02.018.


















 556
556

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











