




 文章提出了一种使用鲸鱼优化算法解决复杂环境下无人机三维航迹规划的方法。通过构建三维地形和禁飞区模型,结合适应的评价函数,该算法旨在寻找最优飞行路径。代码示例展示了算法的关键步骤,包括搜索代理的位置更新和领导者的选取。
文章提出了一种使用鲸鱼优化算法解决复杂环境下无人机三维航迹规划的方法。通过构建三维地形和禁飞区模型,结合适应的评价函数,该算法旨在寻找最优飞行路径。代码示例展示了算法的关键步骤,包括搜索代理的位置更新和领导者的选取。
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
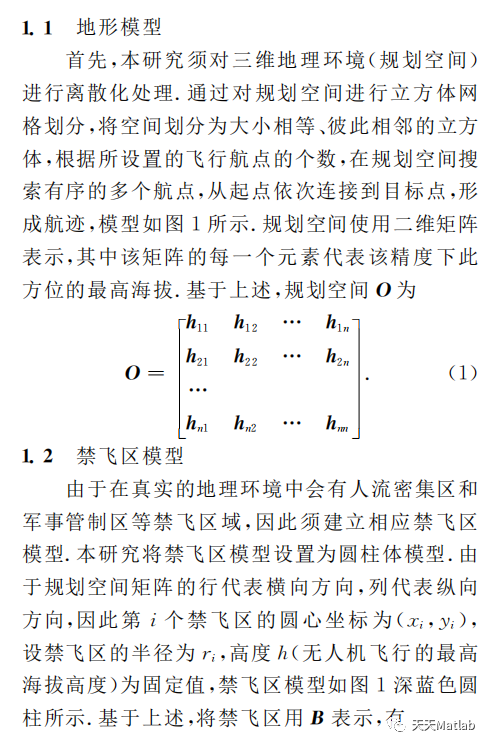
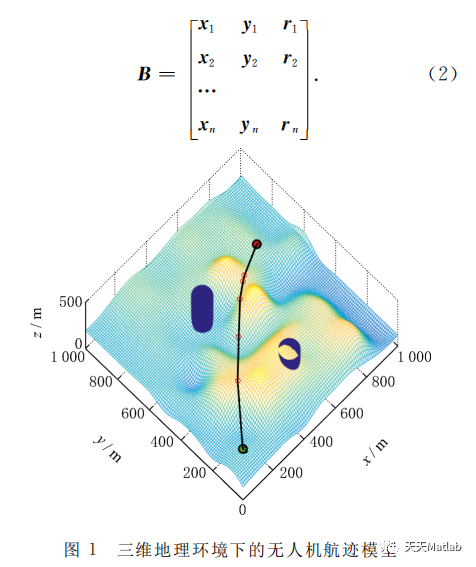
无人机三维路径规划是一个比较复杂的全局优化问题,其目标是在考虑威胁和约束的条件下,获得最优或接近最优的飞行路径.为了解决三维复杂环境下的无人机航迹规划问题,提出一种基于鲸鱼优化算法的无人机三维航迹规划方法.模拟真实的地理环境,建立三维地形模型和禁飞区模型,构造合理的评价函数.
⛄ 部分代码
%_________________________________________________________________________%
% 鲸鱼优化算法 %
%_________________________________________________________________________%
% The Whale Optimization Algorithm
function [Leader_pos,Leader_score,Convergence_curve]=WOA(SearchAgents_no,Max_iter,lb,ub,dim,fobj)
% initialize position vector and score for the leader
Leader_pos=zeros(1,dim);
Leader_score=inf; %change this to -inf for maximization problems
%Initialize the positions of search agents
Positions=initialization(SearchAgents_no,dim,ub,lb);
Convergence_curve=zeros(1,Max_iter);
t=0;% Loop counter
% Main loop
while t<Max_iter
for i=1:size(Positions,1)
% Return back the search agents that go beyond the boundaries of the search space
Flag4ub=Positions(i,:)>ub;
Flag4lb=Positions(i,:)<lb;
Positions(i,:)=(Positions(i,:).*(~(Flag4ub+Flag4lb)))+ub.*Flag4ub+lb.*Flag4lb;
% Calculate objective function for each search agent
fitness=fobj(Positions(i,:));
% Update the leader
if fitness<Leader_score % Change this to > for maximization problem
Leader_score=fitness; % Update alpha
Leader_pos=Positions(i,:);
end
end
a=2-t*((2)/Max_iter); % a decreases linearly fron 2 to 0 in Eq. (2.3)
% a2 linearly dicreases from -1 to -2 to calculate t in Eq. (3.12)
a2=-1+t*((-1)/Max_iter);
% Update the Position of search agents
for i=1:size(Positions,1)
r1=rand(); % r1 is a random number in [0,1]
r2=rand(); % r2 is a random number in [0,1]
A=2*a*r1-a; % Eq. (2.3) in the paper
C=2*r2; % Eq. (2.4) in the paper
b=1; % parameters in Eq. (2.5)
l=(a2-1)*rand+1; % parameters in Eq. (2.5)
p = rand(); % p in Eq. (2.6)
for j=1:size(Positions,2)
if p<0.5
if abs(A)>=1
rand_leader_index = floor(SearchAgents_no*rand()+1);
X_rand = Positions(rand_leader_index, :);
D_X_rand=abs(C*X_rand(j)-Positions(i,j)); % Eq. (2.7)
Positions(i,j)=X_rand(j)-A*D_X_rand; % Eq. (2.8)
elseif abs(A)<1
D_Leader=abs(C*Leader_pos(j)-Positions(i,j)); % Eq. (2.1)
Positions(i,j)=Leader_pos(j)-A*D_Leader; % Eq. (2.2)
end
elseif p>=0.5
distance2Leader=abs(Leader_pos(j)-Positions(i,j));
% Eq. (2.5)
Positions(i,j)=distance2Leader*exp(b.*l).*cos(l.*2*pi)+Leader_pos(j);
end
end
end
t=t+1;
Convergence_curve(t)=Leader_score;
end
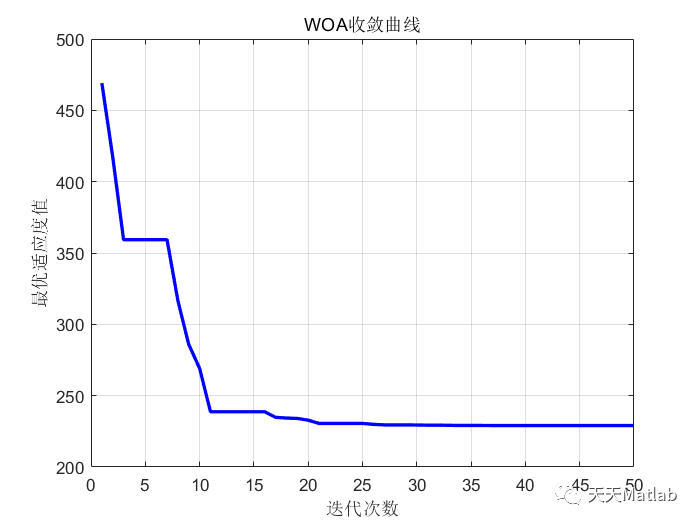
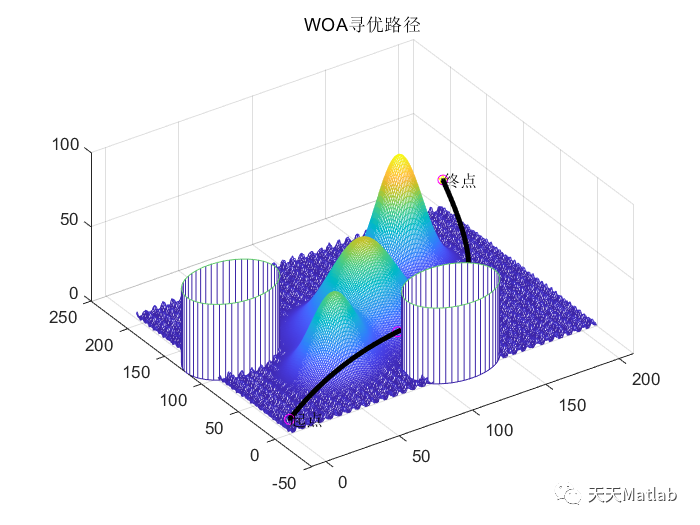
⛄ 运行结果
⛄ 参考文献
[1] 石刻. 基于改进鲸鱼算法的无人机航迹规划研究[D]. 哈尔滨工业大学.
[2] 郭启程杜晓玉张延宇周毅. 基于改进鲸鱼算法的无人机三维路径规划[J]. 计算机科学, 2021, 48(12):304-311.
[3] 舒聪. 面向无人机航迹规划的改进麻雀搜索算法及应用.
[4] 刘贵云, 王子维, 梁忠伟,等. 一种基于鲸鱼优化算法的多无人机路径规划方法:.
⛳️ 完整代码
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料


















 463
463

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











