




上一个小节中,我们用WEBPART实现了网页的一个小的布局,其实在这个页面中已经实现了一个小小的个性化了,用户已经可以最小化、最大化及关闭WEBPART部件了,当然现在的情况下还是很糟的,那就是如果用户关了一个WEBPART部件,还想添加被关闭的部件就没有办法了,不过不用耽心,我们会第三小节介绍如何打开被关闭的部件,本小节中会介绍如何让用户自定义WEBPART部件的布局。
1、在第三行的第二列中添加一个新区域CatalogZone,用于放置被关闭的WEBPART部件的目录控件的区域;
2、在新区域CatalogZone中放置一个新的控件PageCatalogPart,PageCatalogPart用来显示本页中被关闭的WEBPART部件或是自定义的WEBPART部件;
3、是不是现在就可以了?不可以的,要让PageCatalogPart正常工作,要将WebPartManager的DisplayMode属性设为CatalogDisplayMode模式,现在为了达到设置的目的,在表的第三行第列中放置一个LinkButton;
4、在LinkButton的事件中添加如下代码:
if (WebPartManager1.DisplayMode != WebPartManager.CatalogDisplayMode)
{
WebPartManager1.DisplayMode = WebPartManager.CatalogDisplayMode;
this.LinkButtonAddWebpart.Text = "End Adding";
}
else
{
WebPartManager1.DisplayMode = WebPartManager.BrowseDisplayMode;
this.LinkButtonAddWebpart.Text = "Add Webpart";
}
上述代码中的WebPartManager1是上节中生成的WebPartManager类的实例,使用时要注意,WebPartManager1只要在一个页面中生成,在其它页中也可以调用,不需要再生成WebPartManager类的实例。
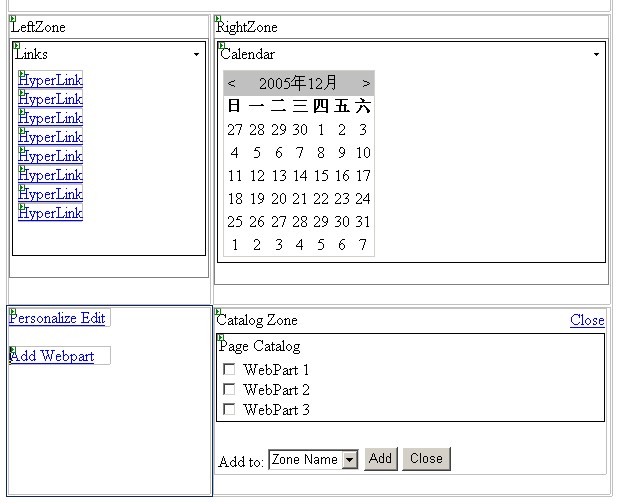
图示一、设计视图局部
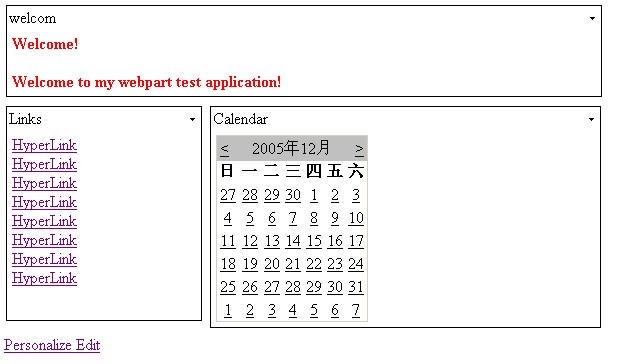
图示二、用户调整前视图
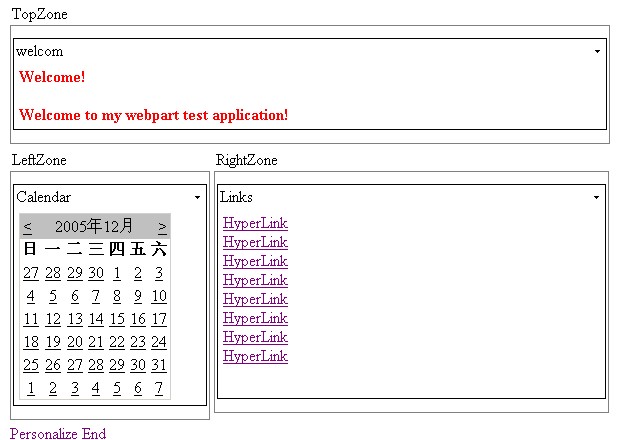
图示三、用户调整后视图(Links和Calendar已经互换了:)
待续:VS.NET2005中的WEBPART初步(三)中,将会介绍用户如何添加 被关闭了的WEBPART部件。
VS.NET2005中的WEBPART初步(二)
最新推荐文章于 2019-10-02 07:25:07 发布
 本文介绍如何在网页中实现用户自定义WebPart部件布局的方法,包括添加CatalogZone区域、放置PageCatalogPart控件以及通过LinkButton切换显示模式。
本文介绍如何在网页中实现用户自定义WebPart部件布局的方法,包括添加CatalogZone区域、放置PageCatalogPart控件以及通过LinkButton切换显示模式。

















 449
449

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









