 链栈实现与操作解析
链栈实现与操作解析





 本文深入探讨了链栈的数据结构及其创建与操作方法,包括Push、Pop等关键函数的实现细节,通过C语言代码示例,解析了链栈的工作原理。
本文深入探讨了链栈的数据结构及其创建与操作方法,包括Push、Pop等关键函数的实现细节,通过C语言代码示例,解析了链栈的工作原理。
[Data_Structure notes]链栈的创建及相关操作
本篇主要记录学习数据结构的一些笔记,以及一些个人思考。
参考书是《数据结构与算法分析(c语言描述)》(机械工业出版社)
#include<stdio.h>
#include<stdlib.h>
typedef int Elementtype;
typedef struct Node
{
Elementtype data;
struct Node* next;
}Stack;
typedef struct Node* Ptrstack;
int isEmpty(Stack* s);
void Push(Elementtype x,Stack* s);
void Pop(Stack* s);
Stack* CreateStack(void);
int main(void)
{
Stack* s;
s=CreateStack();
Push(2,s);
Push(3,s);
Pop(s);
printf("%d",s->next->data);
system("pause");
return 0;
}
/* Routine to create an empty stack */
Stack* CreateStack(void)
{
Ptrstack p;
p =(Stack*)malloc(sizeof(Stack));
if(p != NULL)
{
p->next = NULL;
}
return p;
}
/* Routine to push an element in the stack */
void Push(Elementtype x,Stack* s)
{
Ptrstack Tmp;
Tmp = (Stack*)malloc(sizeof(Stack));
if(Tmp == NULL)
printf("out of space");
else{
Tmp->data = x;
Tmp->next = s->next;
s->next = Tmp;
}
}
/* Routine to pop an element in the stack */
void Pop(Stack* s)
{
Ptrstack FirstCell;
if(isEmpty(s))
printf("s is empty");
else{
FirstCell = s->next;
s->next = s->next->next;
free(FirstCell);
}
}
int isEmpty(Stack* s)
{
return s->next == NULL;
}
该书上创建链栈的方法较为独特,与大多数不同(很多都是创建两个结构体,一个用来创建链栈,另一个用来维护链栈,较为容易理解)。个人有两个比较疑惑的地方,一个是MakeEmpty函数的创建,还有一个是Pop的操作也不是特别理解。后来想了一番,把自己的一些个人理解记在这里。
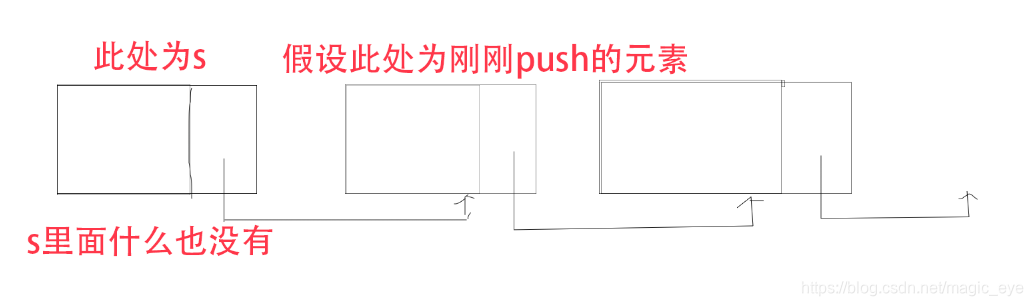
(不好意思,随手乱画的),每一次新加进来的元素都放在链表的头节点后面,而每一次pop的也是头节点后面的那个元素。至于MakeEmpty函数,应该是为了只保留一个空的头节点,什么也不干,也不保存数据,就是一个头节点。

















 939
939

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









