




1. 引言
随着航空技术的飞速发展,低空飞行器的应用领域日益广泛,涵盖了物流配送、农业植保、应急救援、环境监测等多个方面。低空飞行器的普及不仅提高了工作效率,还为传统行业带来了革命性的变革。然而,低空飞行器的广泛应用也带来了诸多挑战,尤其是在飞行安全、空域管理、环境适应性等方面。为了确保低空飞行器的安全运行,并优化其性能,低空模拟系统的设计与开发显得尤为重要。
低空模拟系统是一种基于计算机仿真技术的虚拟环境,能够模拟低空飞行器在不同条件下的飞行行为、环境交互以及系统响应。通过模拟系统,可以在实际飞行前对飞行器的性能进行全面评估,识别潜在风险,优化飞行策略,从而降低实际飞行中的不确定性。此外,低空模拟系统还可以用于飞行员的培训、飞行任务的规划以及飞行数据的分析,为低空飞行器的安全运行提供有力支持。
在设计低空模拟系统时,需综合考虑以下几个关键因素:
- 飞行环境模拟:包括气象条件、地形地貌、空域限制等,确保模拟环境与实际飞行环境高度一致。
- 飞行器动力学模型:建立精确的飞行器动力学模型,模拟飞行器的运动特性、控制响应以及故障模式。
- 传感器与数据融合:模拟飞行器上各类传感器的工作状态,并通过数据融合技术提高模拟的精度和可靠性。
- 人机交互界面:设计直观易用的操作界面,便于用户进行飞行任务的规划、监控与调整。
- 系统扩展性与兼容性:确保系统能够支持多种类型的低空飞行器,并具备良好的扩展性,以适应未来技术的发展。
低空模拟系统的设计不仅需要先进的技术支持,还需结合实际应用需求,确保系统的可行性与实用性。通过模拟系统的应用,可以有效降低低空飞行器的研发成本,缩短开发周期,并为低空飞行器的安全运行提供有力保障。
通过以上设计,低空模拟系统将成为一个功能全面、性能优越的仿真平台,为低空飞行器的研发、测试与运行提供强有力的支持。
1.1 项目背景
随着航空技术的快速发展和低空飞行需求的日益增长,低空模拟系统的设计与开发成为了航空领域的重要研究方向。低空飞行环境复杂,涉及地形、气象、空域管理等多方面因素,传统的飞行模拟系统难以全面覆盖这些需求。因此,开发一套高效、精准的低空模拟系统,不仅能够为飞行员提供逼真的训练环境,还能为航空器的设计优化、空域规划及安全管理提供有力支持。
近年来,低空飞行活动在民用和军用领域均呈现出快速增长的趋势。例如,无人机物流、城市空中交通(UAM)、应急救援等新兴应用场景对低空飞行提出了更高的要求。根据国际民航组织(ICAO)的统计数据显示,全球无人机市场规模预计将在未来五年内以年均20%以上的速度增长,而低空飞行事故率也呈上升趋势。这些数据表明,低空飞行安全性和操作效率的提升迫在眉睫。
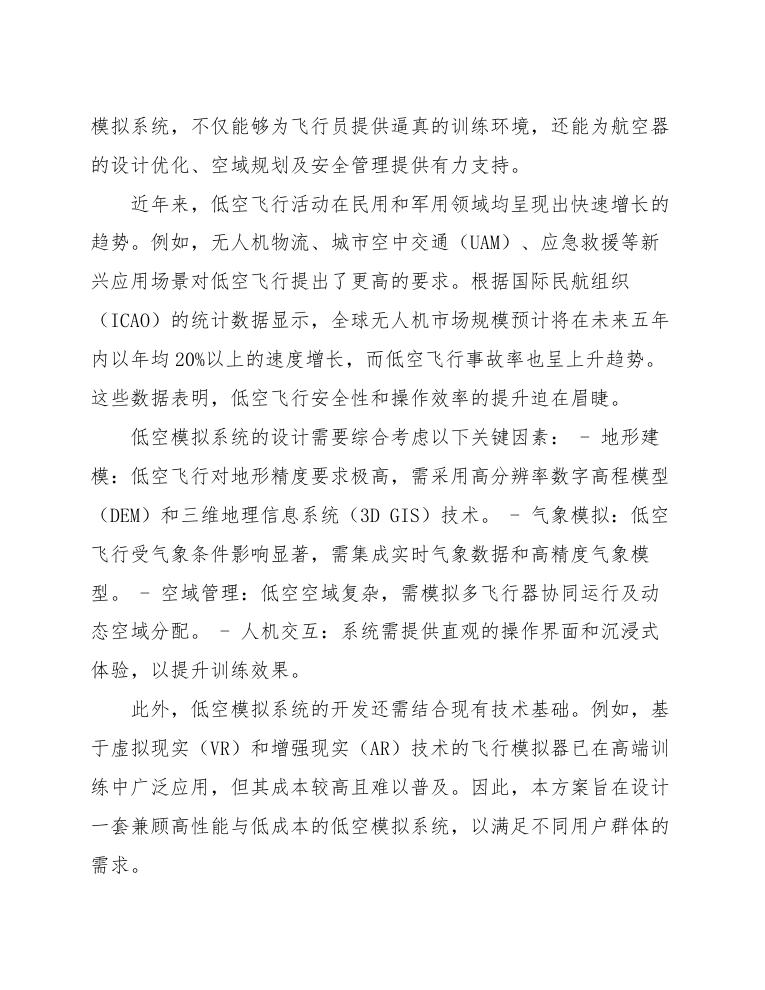
低空模拟系统的设计需要综合考虑以下关键因素:
- 地形建模:低空飞行对地形精度要求极高,需采用高分辨率数字高程模型(DEM)和三维地理信息系统(3D GIS)技术。
- 气象模拟:低空飞行受气象条件影响显著,需集成实时气象数据和高精度气象模型。
- 空域管理:低空空域复杂,需模拟多飞行器协同运行及动态空域分配。
- 人机交互:系统需提供直观的操作界面和沉浸式体验,以提升训练效果。
此外,低空模拟系统的开发还需结合现有技术基础。例如,基于虚拟现实(VR)和增强现实(AR)技术的飞行模拟器已在高端训练中广泛应用,但其成本较高且难以普及。因此,本方案旨在设计一套兼顾高性能与低成本的低空模拟系统,以满足不同用户群体的需求。
通过以上分析,可以看出低空模拟系统的设计不仅具有重要的现实意义,还具备较高的技术可行性。本方案将围绕上述关键因素展开详细设计,力求为低空飞行领域提供一套高效、可靠的模拟解决方案。
1.2 项目目标
本项目的核心目标是设计并实现一套高效、可靠的低空模拟系统,旨在为低空飞行器的研发、测试和训练提供高度仿真的环境。该系统将模拟低空飞行中的各种复杂场景,包括但不限于气象条件、地形特征、空域限制以及飞行器之间的交互。通过精确的物理模型和实时数据处理,系统将能够准确反映真实飞行环境中的动态变化,从而为飞行器的性能评估、操作训练和任务规划提供有力支持。
具体而言,项目目标包括以下几个方面:
-
高精度仿真:系统需具备高精度的物理仿真能力,能够模拟飞行器的动力学特性、气动效应以及环境因素对飞行的影响。仿真精度应达到行业标准,确保测试结果的可靠性和有效性。
-
实时响应:系统需具备实时数据处理和响应能力,能够在毫秒级时间内完成复杂场景的计算和渲染,确保飞行器操作的实时性和流畅性。
-
多场景支持:系统应支持多种低空飞行场景的模拟,包括城市环境、山区地形、海上飞行等,并能够根据用户需求快速切换和配置不同的场景参数。
-
用户友好性:系统界面设计应简洁直观,便于用户操作和配置。同时,系统应提供丰富的文档和培训材料,帮助用户快速上手并充分利用系统功能。
-
可扩展性:系统架构应具备良好的可扩展性,能够根据未来需求灵活添加新的功能模块或升级现有模块,确保系统的长期可用性和技术领先性。
为实现上述目标,项目将采用先进的仿真技术和硬件设备,结合严格的质量控制流程,确保系统的高性能和稳定性。同时,项目团队将与相关领域的专家和用户紧密合作,确保系统设计符合实际需求,并在实际应用中发挥最大价值。
通过上述目标的实现,本项目将显著提升低空飞行器的研发效率和测试质量,为相关领域的技术进步和应用推广提供有力支持。
1.3 项目范围
本项目的范围涵盖了低空模拟系统的设计、开发、实施和测试,旨在为飞行训练、无人机操作测试以及低空飞行环境模拟提供一个高效、安全的平台。系统将模拟真实低空飞行环境中的各种气象条件、地形特征以及空中交通情况,确保用户能够在接近真实的环境中完成训练和测试任务。项目的主要交付物包括硬件设备、软件系统、用户手册以及相关的技术支持服务。
具体而言,项目范围包括以下几个方面:
-
硬件系统设计:包括飞行模拟器、环境传感器、显示设备、控制台等硬件设备的选型、集成与调试。硬件系统需满足高精度、低延迟的要求,确保模拟环境的真实性和操作的流畅性。
-
软件系统开发:开发低空飞行模拟软件,支持多种飞行器模型、气象条件模拟、地形生成以及空中交通管理功能。软件系统需具备良好的可扩展性和兼容性,能够支持未来的功能升级和硬件扩展。
-
环境模拟与数据集成:系统将集成多种环境数据,包括气象数据、地形数据、空中交通数据等,确保模拟环境的高度真实性。数据来源包括但不限于气象卫星、地形数据库以及实时空中交通信息。
-
用户界面与操作体验优化:设计直观、易用的用户界面,确保用户能够快速上手并高效完成训练任务。系统将提供多种操作模式,包括手动操作、自动操作以及半自动操作,以满足不同用户的需求。
-
测试与验证:在系统开发完成后,将进行全面的测试与验证,包括功能测试、性能测试、稳定性测试以及用户体验测试。测试结果将用于优化系统设计,确保系统在实际应用中的可靠性和稳定性。
-
培训与支持服务:项目交付后,将提供详细的用户培训和技术支持服务,确保用户能够充分利用系统的各项功能。培训内容包括系统操作、故障排除、维护保养等。
项目的实施将严格按照项目管理流程进行,确保每个阶段的任务按时完成,并达到预期的质量标准。项目团队将与相关领域的专家紧密合作,确保系统的技术先进性和实用性。通过本项目的实施,将为低空飞行训练和测试提供一个高效、可靠的解决方案,推动相关领域的技术进步和应用发展。
1.4 项目意义
低空模拟系统设计方案的实施具有重要的现实意义和应用价值。首先,该系统能够为低空飞行器的研发和测试提供高度仿真的环境,从而显著降低实际飞行测试的成本和风险。通过模拟各种气象条件、地形地貌和飞行场景,研发团队可以在实验室环境中进行全面的性能评估和优化,确保飞行器在实际应用中的安全性和可靠性。
其次,低空模拟系统的建设将推动相关技术的进步和创新。系统集成先进的传感器、数据处理算法和实时控制技术,不仅提升了飞行器的智能化水平,还为未来低空交通管理系统的开发奠定了基础。通过模拟系统的应用,可以积累大量的飞行数据和经验,为制定低空飞行标准和规范提供科学依据。
此外,低空模拟系统在应急救援、农业植保、物流配送等领域具有广泛的应用前景。例如,在灾害发生时,模拟系统可以快速生成灾害区域的飞行路径和应急方案,指导无人机进行精准救援;在农业领域,系统可以模拟不同作物和地形条件下的飞行作业,优化植保无人机的作业效率和效果。
- 降低研发成本:通过模拟测试减少实际飞行测试次数,节省大量资金和资源。
- 提升安全性:在实验室环境中进行全面的性能评估,确保飞行器在实际应用中的安全性和可靠性。
- 推动技术进步:集成先进技术,提升飞行器的智能化水平,为未来低空交通管理系统的开发奠定基础。
- 广泛应用前景:在应急救援、农业植保、物流配送等领域具有广泛的应用前景。
综上所述,低空模拟系统设计方案的实施不仅能够显著提升低空飞行器的研发效率和安全性,还将推动相关技术的进步和广泛应用,具有重要的现实意义和长远的发展价值。
2. 系统需求分析
在低空模拟系统的设计过程中,系统需求分析是确保系统功能完备、性能优越的关键步骤。首先,系统需要满足对低空飞行环境的精确模拟,包括气象条件、地形特征、空域限制等多维度的仿真需求。气象条件模拟应涵盖风速、风向、温度、湿度、气压等参数,并能够动态调整以反映真实环境的变化。地形特征模拟则需要高精度的数字高程模型(DEM)和地理信息系统(GIS)数据支持,确保地形起伏、建筑物分布、植被覆盖等细节的准确呈现。
其次,系统需具备实时数据处理能力,以支持飞行器的动态响应和交互。这包括对飞行器状态(如位置、速度、姿态)的实时监控,以及对传感器数据(如雷达、红外、光学)的高效处理。系统应能够在毫秒级时间内完成数据采集、处理和反馈,确保模拟环境的实时性和沉浸感。
此外,系统还需满足多用户并发操作的需求,支持多个飞行器在同一模拟环境中的协同或对抗演练。为此,系统应具备高效的网络通信机制,确保数据传输的低延迟和高可靠性。同时,系统应提供灵活的用户界面和操作接口,支持不同用户角色的定制化需求,如飞行员、指挥员、观察员等。
在性能方面,系统应具备高可靠性和稳定性,能够在长时间运行中保持高效性能。系统应支持模块化设计,便于功能扩展和维护升级。同时,系统应具备良好的兼容性,能够与现有的飞行模拟器、训练管理系统等无缝集成。
为了确保系统的可行性和实用性,需求分析阶段还需进行详细的用户调研和技术评估。通过与潜在用户的深入交流,明确系统的功能需求和性能指标。同时,对现有技术进行调研和评估,选择合适的技术方案和实现路径。
- 气象条件模拟:风速、风向、温度、湿度、气压等参数
- 地形特征模拟:数字高程模型(DEM)、地理信息系统(GIS)数据
- 实时数据处理:飞行器状态监控、传感器数据处理
- 多用户并发操作:网络通信机制、用户界面和操作接口
- 性能要求:高可靠性、稳定性、模块化设计、兼容性
通过以上需求分析,可以为低空模拟系统的设计提供明确的方向和依据,确保系统能够满足实际应用的需求,并为后续的设计和开发工作奠定坚实的基础。
2.1 功能需求
低空模拟系统的功能需求主要围绕飞行模拟、环境模拟、数据采集与分析、用户交互等方面展开。系统应具备高精度的飞行仿真能力,能够模拟多种飞行器的动态行为,包括固定翼飞机、旋翼机、无人机等。飞行仿真模块需支持六自由度(6-DOF)运动模型,涵盖姿态、速度、加速度、位置等关键参数的实时计算与更新。此外,系统应支持多种飞行场景的模拟,如起飞、巡航、降落、紧急情况处理等,并能够根据用户需求自定义飞行任务。
环境模拟功能是系统的核心需求之一。系统需能够模拟真实的气象条件,包括风速、风向、温度、湿度、气压等参数,并支持动态变化。同时,地形模拟功能需提供高分辨率的地形数据,支持三维地形渲染和碰撞检测。系统还应具备昼夜交替、天气变化(如雨、雪、雾)等环境效果的模拟能力,以增强仿真的真实感。
数据采集与分析功能是系统的重要组成部分。系统需实时记录飞行过程中的各项数据,包括飞行器的状态参数、环境参数、用户操作记录等。数据采集模块应支持高频率采样(如100Hz以上),并能够将数据存储为结构化格式(如CSV、JSON)以便后续分析。数据分析模块应提供可视化工具,支持数据的实时监控、历史数据回放、统计分析等功能,帮助用户评估飞行性能和操作效果。
用户交互功能是系统易用性的关键。系统需提供直观的用户界面,支持多种输入设备(如操纵杆、键盘、鼠标、触摸屏等),并能够根据用户的操作实时调整仿真参数。系统还应支持多用户协同操作,允许多个用户同时参与飞行任务,并通过网络实现数据同步。此外,系统需提供详细的帮助文档和操作指南,帮助用户快速上手。
- 飞行仿真:支持6-DOF运动模型,涵盖姿态、速度、加速度、位置等参数。
- 环境模拟:模拟真实气象条件(风速、风向、温度、湿度、气压)和地形数据。
- 数据采集与分析:实时记录飞行数据,支持高频率采样和结构化存储。
- 用户交互:提供直观的用户界面,支持多种输入设备和多用户协同操作。
系统还需具备一定的扩展性和兼容性,能够集成第三方硬件设备(如飞行控制器、传感器)和软件工具(如MATLAB、Simulink),以满足不同用户的需求。同时,系统应支持模块化设计,便于后续功能升级和维护。通过以上功能需求的实现,低空模拟系统将能够为用户提供高度逼真的飞行仿真体验,并支持多种应用场景,如飞行训练、任务规划、设备测试等。
2.1.1 飞行模拟
飞行模拟功能是低空模拟系统的核心组成部分,旨在通过高精度的仿真技术,模拟飞行器在低空环境中的动态行为。该功能需要实现飞行器的姿态、速度、高度、航向等关键参数的实时计算与更新,并能够根据外部环境(如风速、气压、温度等)的变化进行动态调整。系统应支持多种飞行器模型的加载与切换,包括固定翼飞机、旋翼机、无人机等,确保不同飞行器的飞行特性能够被准确模拟。
为了实现高精度的飞行模拟,系统需要集成以下关键模块:
-
动力学模型:基于飞行器的物理特性,建立六自由度(6DOF)动力学模型,涵盖飞行器的平移和旋转运动。模型应考虑飞行器的质量分布、气动特性、发动机推力等因素,确保模拟结果的准确性。
-
环境模型:模拟低空环境中的气象条件,包括风速、风向、气压、温度等参数。环境模型应支持动态变化,能够根据时间或用户输入调整环境参数,以模拟不同气象条件下的飞行场景。
-
传感器模拟:模拟飞行器上的传感器数据,如GPS、IMU(惯性测量单元)、气压计等。传感器数据应包含噪声和误差,以模拟真实环境中的传感器性能。
-
控制输入模拟:支持用户通过操纵杆、键盘或其他输入设备对飞行器进行控制。系统应能够实时响应用户输入,并将控制指令传递给动力学模型,实现飞行器的姿态和轨迹调整。
-
可视化与反馈:提供实时的三维可视化界面,显示飞行器的姿态、轨迹、环境信息等。同时,系统应提供飞行数据的实时反馈,包括飞行参数、传感器数据、控制指令等,以便用户进行监控和分析。
为了确保飞行模拟功能的性能与精度,系统应满足以下技术要求:
- 实时性:飞行模拟的计算频率应不低于100Hz,以确保飞行器姿态和轨迹的平滑更新。
- 精度:动力学模型的计算误差应控制在1%以内,传感器模拟的误差应符合实际传感器的性能指标。
- 可扩展性:系统应支持模块化设计,便于后续添加新的飞行器模型或环境参数。
以下是一个简化的飞行模拟流程示例:
通过上述功能模块的集成与优化,飞行模拟功能能够为用户提供高度逼真的低空飞行体验,同时为飞行器的设计、测试与训练提供可靠的技术支持。
2.1.2 环境模拟
在低空模拟系统的设计中,环境模拟是实现系统功能的核心需求之一。环境模拟的主要目标是复现低空飞行过程中可能遇到的各种自然和人为环境条件,以确保系统能够在接近真实的环境中运行和测试。具体而言,环境模拟需要涵盖以下几个方面:
首先,气象条件的模拟是环境模拟的重要组成部分。低空飞行环境受气象因素影响较大,因此系统需要能够模拟多种气象条件,包括风速、风向、温度、湿度、气压、降水(如雨、雪、雾)等。这些参数的模拟应具备动态调整能力,以反映真实环境中气象条件的快速变化。例如,系统应支持风速在0至50米/秒范围内可调,温度在-40°C至+50°C之间可调,湿度在0%至100%之间可调。此外,系统还应能够模拟突发性气象事件,如雷暴、强风切变等,以测试飞行器在极端条件下的响应能力。
其次,地形地貌的模拟也是环境模拟的关键需求。低空飞行器通常在地形复杂的环境中运行,因此系统需要能够生成和模拟多种地形地貌,包括平原、山地、丘陵、城市建筑群等。地形数据应基于真实地理信息,并支持高精度建模。例如,系统应能够模拟海拔高度在-100米至5000米之间的地形,并支持地形分辨率为1米或更高的精细建模。此外,系统还应能够动态生成障碍物,如建筑物、树木、电线杆等,以测试飞行器的避障能力。
第三,电磁环境的模拟是低空模拟系统中不可忽视的部分。低空飞行器在运行过程中可能会受到多种电磁干扰,包括无线电信号、雷达信号、GPS信号等。因此,系统需要能够模拟复杂的电磁环境,包括信号强度、频率、调制方式等参数的动态变化。例如,系统应支持模拟频率范围为1MHz至6GHz的电磁信号,信号强度在-120dBm至+20dBm之间可调。此外,系统还应能够模拟多径效应、信号衰减等电磁传播特性,以测试飞行器在复杂电磁环境中的通信和导航性能。
最后,环境模拟系统还应具备实时性和可扩展性。实时性要求系统能够根据飞行器的状态和环境参数的变化,动态调整模拟环境,以确保测试结果的准确性和可靠性。可扩展性则要求系统能够支持多种飞行器的测试需求,并能够根据未来的技术发展进行功能扩展。例如,系统应支持多飞行器同时测试,并能够根据测试需求动态调整环境参数的复杂度和精度。
综上所述,环境模拟在低空模拟系统中扮演着至关重要的角色。通过精确模拟气象条件、地形地貌、电磁环境等多种因素,系统能够为飞行器的测试和验证提供高度逼真的环境,从而确保飞行器在实际应用中的安全性和可靠性。
2.1.3 数据采集与分析
在低空模拟系统中,数据采集与分析是实现系统功能的核心环节之一。该模块的主要任务是通过传感器、雷达、GPS等设备实时采集低空环境中的各类数据,包括但不限于飞行器位置、速度、高度、气象条件、障碍物分布等信息。采集到的数据需要经过预处理、存储和分析,以支持系统的实时监控、决策支持和后续的仿真优化。
首先,数据采集模块需要具备高精度和高频率的采样能力。飞行器的位置和速度数据通常通过GPS和惯性导航系统(INS)获取,采样频率应不低于10Hz,以确保数据的实时性和准确性。气象数据(如风速、风向、温度、湿度等)则通过气象传感器采集,采样频率可根据实际需求设置为1Hz至5Hz。障碍物数据通过雷达或激光雷达(LiDAR)获取,采样频率应不低于20Hz,以确保对动态障碍物的快速响应。
数据采集后,需进行预处理以消除噪声和异常值。预处理步骤包括数据滤波、去噪、插值和校准。常用的滤波算法包括卡尔曼滤波和小波变换,能够有效去除高频噪声并保留有用信息。对于缺失数据,可采用线性插值或样条插值进行补充。校准环节则通过对比实测数据与标准参考值,修正传感器的系统误差。
数据存储模块需设计为分布式架构,以支持海量数据的高效存储和快速检索。可采用时序数据库(如InfluxDB)或分布式文件系统(如HDFS)存储原始数据和分析结果。数据存储格式应标准化,推荐使用JSON或CSV格式,以便于后续的数据交换和处理。
数据分析模块是系统的核心功能之一,主要包括实时分析和离线分析两部分。实时分析用于监控飞行器的状态和环境变化,支持异常检测和预警功能。常用的实时分析算法包括滑动窗口统计、聚类分析和模式识别。离线分析则用于历史数据的深度挖掘,支持飞行路径优化、风险评估和仿真验证。离线分析可采用机器学习算法(如支持向量机、随机森林)或深度学习模型(如卷积神经网络、长短期记忆网络)进行数据建模和预测。
以下是数据采集与分析模块的关键性能指标:
- 数据采样频率:GPS/INS ≥10Hz,气象传感器 1-5Hz,雷达/LiDAR ≥20Hz
- 数据预处理延迟:≤100ms
- 数据存储容量:≥1TB,支持扩展
- 实时分析响应时间:≤200ms
- 离线分析处理时间:≤10分钟(针对1小时数据)
通过上述设计,数据采集与分析模块能够为低空模拟系统提供可靠的数据支持,确保系统的实时性、准确性和可扩展性。同时,模块的分布式架构和标准化数据格式也为后续的系统集成和功能扩展提供了便利。
2.2 非功能需求
在低空模拟系统的设计中,非功能需求是确保系统在实际应用中能够稳定、高效运行的关键因素。首先,系统的性能需求必须得到充分满足。系统应能够在高并发情况下保持稳定的响应时间,确保模拟数据的实时性和准确性。具体而言,系统在处理1000个并发用户时,平均响应时间应控制在200毫秒以内,峰值响应时间不超过500毫秒。此外,系统的吞吐量应达到每秒处理5000条数据的能力,以满足大规模模拟场景的需求。
系统的可用性需求同样至关重要。系统应具备99.9%的可用性,确保在全年运行中,因故障导致的停机时间不超过8.76小时。为实现这一目标,系统应采用高可用架构,包括冗余设计、故障自动切换机制以及定期的系统健康检查。同时,系统应支持7x24小时不间断运行,确保在任何时间点都能提供稳定的服务。
安全性需求是低空模拟系统设计中不可忽视的一环。系统应具备多层次的安全防护措施,包括但不限于数据加密、访问控制、身份认证和日志审计。具体而言,所有敏感数据在传输和存储过程中应采用AES-256加密算法进行加密,确保数据在传输过程中不被窃取或篡改。此外,系统应支持基于角色的访问控制(RBAC),确保不同用户只能访问其权限范围内的数据和功能。系统还应具备日志审计功能,记录所有关键操作,以便在发生安全事件时进行追溯和分析。
系统的可扩展性需求也是设计中的重要考虑因素。随着模拟场景的复杂性和数据量的增加,系统应能够灵活扩展,以满足未来的需求。具体而言,系统应支持水平扩展,能够通过增加服务器节点来提升处理能力。同时,系统应具备良好的模块化设计,确保在新增功能或模块时,能够快速集成并保持系统的稳定性。
系统的可维护性需求同样不容忽视。系统应具备良好的文档和代码结构,确保开发人员能够快速理解和维护系统。具体而言,系统应采用模块化设计,每个模块的功能和接口应清晰定义,便于独立开发和测试。此外,系统应提供详细的日志和监控功能,帮助运维人员快速定位和解决问题。系统还应支持自动化部署和配置管理,减少人工操作带来的错误和风险。
系统的兼容性需求也是设计中需要考虑的重要因素。系统应能够在多种操作系统和硬件平台上运行,确保用户能够根据自身需求选择合适的运行环境。具体而言,系统应支持Windows、Linux和macOS等主流操作系统,并能够在x86和ARM架构的硬件平台上运行。此外,系统应提供标准的API接口,确保能够与其他系统进行无缝集成。
最后,系统的用户体验需求也应得到充分考虑。系统应具备友好的用户界面和操作流程,确保用户能够快速上手并高效使用系统。具体而言,系统应提供直观的图形化界面,支持拖拽操作和快捷键操作,提升用户的操作效率。此外,系统应提供详细的帮助文档和在线支持,帮助用户解决使用过程中遇到的问题。
综上所述,低空模拟系统的非功能需求涵盖了性能、可用性、安全性、可扩展性、可维护性、兼容性和用户体验等多个方面。通过合理的设计和实现,确保系统在实际应用中能够稳定、高效地运行,满足用户的需求。
2.2.1 系统性能
系统性能是低空模拟系统设计中的关键因素之一,直接决定了系统的可用性、稳定性和用户体验。首先,系统应具备高实时性,确保在低空飞行模拟过程中,数据的采集、处理和反馈能够在毫秒级时间内完成,以满足飞行模拟的实时性要求。具体而言,系统响应时间应控制在50ms以内,以确保飞行操作的流畅性和准确性。
其次,系统的计算能力需满足复杂场景下的高负载需求。低空飞行模拟涉及大量的环境数据、飞行器状态数据以及物理模型的实时计算。因此,系统应支持多核并行计算,并具备足够的计算资源以应对高峰时段的计算压力。建议采用高性能计算集群或分布式计算架构,确保系统在模拟复杂场景时仍能保持稳定的性能表现。
在数据处理方面,系统需具备高效的数据吞吐能力。低空模拟系统通常需要处理大量的传感器数据、气象数据以及地理信息数据。系统应支持每秒至少100MB的数据吞吐量,并具备数据压缩和优化能力,以减少数据传输延迟和存储压力。此外,系统应支持多种数据格式的兼容性,确保不同来源的数据能够无缝集成和处理。
系统的稳定性也是性能需求的重要组成部分。低空模拟系统应能够在长时间运行中保持高可用性,避免因硬件故障或软件异常导致的系统崩溃。建议采用冗余设计和故障恢复机制,确保在部分组件失效时,系统仍能正常运行或快速恢复。同时,系统应具备自动监控和预警功能,能够实时检测性能瓶颈并及时调整资源分配。
在图形渲染性能方面,系统需支持高分辨率的实时渲染,以确保飞行模拟场景的逼真度和沉浸感。建议采用高性能图形处理器(GPU),并支持多通道渲染技术,以满足多屏显示或虚拟现实(VR)设备的需求。图形渲染帧率应稳定在60fps以上,以避免画面卡顿或延迟对用户体验的影响。
最后,系统的扩展性和兼容性也是性能需求的重要考量。低空模拟系统应具备良好的模块化设计,支持后续功能扩展和硬件升级。同时,系统应兼容多种操作系统和开发平台,确保在不同环境下的稳定运行。
综上所述,系统性能需求涵盖了实时性、计算能力、数据处理、稳定性、图形渲染以及扩展性等多个方面。通过合理的设计和优化,确保系统在满足功能需求的同时,具备高效、稳定和可扩展的性能表现。
2.2.2 系统可靠性
系统可靠性是低空模拟系统设计中的关键要素之一,直接决定了系统在实际应用中的稳定性和可用性。为确保系统能够在复杂多变的低空环境中持续稳定运行,需从硬件、软件、数据管理及容错机制等多个维度进行综合设计。
首先,硬件可靠性是系统可靠性的基础。系统应采用高可靠性的硬件设备,如工业级传感器、冗余电源模块和抗干扰通信设备。所有关键硬件组件应具备自检功能,能够在启动时自动检测硬件状态,并在运行过程中实时监控硬件健康度。对于易损部件,如传感器和执行器,应采用冗余设计,确保在某一部件失效时,系统仍能通过备用部件继续运行。此外,硬件设备应具备良好的环境适应性,能够在温度、湿度、振动等极端条件下稳定工作。
其次,软件可靠性是系统稳定运行的核心保障。系统软件应采用模块化设计,确保各功能模块之间的独立性,避免因某一模块故障导致整个系统崩溃。软件应具备完善的异常处理机制,能够在检测到异常时自动切换到备用逻辑或进入安全模式。为提高软件的可靠性,需进行严格的代码审查和测试,包括单元测试、集成测试和系统测试。测试过程中应模拟各种异常情况,如通信中断、数据丢失、硬件故障等,确保软件能够在极端条件下正常运行。
数据管理是系统可靠性的重要组成部分。系统应具备高效的数据采集、存储和传输能力,确保数据的完整性和一致性。数据采集过程中应采用冗余校验机制,如CRC校验或奇偶校验,防止数据在传输过程中发生错误。数据存储应采用分布式架构,确保在某一存储节点失效时,数据仍能通过其他节点访问。此外,系统应具备数据备份和恢复功能,能够在数据丢失或损坏时快速恢复。
容错机制是提高系统可靠性的重要手段。系统应具备故障检测、隔离和恢复能力,能够在检测到故障时自动隔离故障部件,并启动备用部件或逻辑。对于关键任务,系统应采用多级容错设计,确保在某一级容错机制失效时,仍能通过其他级别的容错机制保障系统运行。例如,在飞行控制系统中,可采用三重冗余设计,通过三个独立的控制单元进行决策,确保在某一单元失效时,系统仍能通过多数表决机制做出正确决策。
为提高系统的可维护性,系统应具备完善的日志记录和故障诊断功能。日志记录应包括系统运行状态、硬件健康度、软件异常等信息,便于在系统出现故障时快速定位问题。故障诊断功能应能够自动分析日志数据,生成故障报告,并提供修复建议。此外,系统应支持远程维护和升级,减少因维护导致的停机时间。
以下为系统可靠性设计的关键指标:
- 硬件平均无故障时间(MTBF):≥ 10,000 小时
- 软件故障率:≤ 0.001 次/小时
- 数据丢失率:≤ 0.0001%
- 系统恢复时间:≤ 5 分钟
- 容错机制覆盖率:≥ 99.9%
通过以上设计,低空模拟系统能够在复杂环境中实现高可靠性运行,满足实际应用需求。
2.2.3 系统安全性
系统安全性是低空模拟系统设计中至关重要的一个方面,必须确保系统在运行过程中能够有效抵御各种潜在的安全威胁,保障数据的完整性、保密性和可用性。首先,系统应具备多层次的安全防护机制,包括物理安全、网络安全和数据安全。物理安全方面,系统硬件设备应部署在受控环境中,配备门禁系统和监控设备,防止未经授权的物理访问。网络安全方面,系统应采用防火墙、入侵检测系统(IDS)和入侵防御系统(IPS)等技术,防止外部攻击和恶意软件的侵入。同时,网络通信应采用加密协议(如TLS/SSL),确保数据传输过程中的机密性和完整性。
数据安全方面,系统应实施严格的访问控制策略,确保只有经过授权的用户才能访问敏感数据。访问控制应基于角色(RBAC)或基于属性的访问控制(ABAC),并根据用户的权限级别动态调整访问权限。此外,系统应定期进行数据备份,并采用冗余存储技术,确保在发生数据丢失或损坏时能够快速恢复。备份数据应存储在安全的位置,并定期进行恢复测试,以验证备份的有效性。
为了应对潜在的安全威胁,系统还应具备实时监控和日志记录功能。监控系统应能够实时检测异常行为,如未经授权的访问尝试、数据泄露或系统性能下降等,并及时发出警报。日志记录应详细记录系统的操作行为和安全事件,便于事后审计和问题排查。日志数据应定期归档,并采用加密存储,防止篡改或泄露。
在系统开发和部署过程中,安全性应贯穿整个生命周期。开发阶段应采用安全编码规范,避免常见的安全漏洞,如SQL注入、跨站脚本攻击(XSS)等。系统上线前应进行全面的安全测试,包括渗透测试、漏洞扫描和代码审计,确保系统在发布前达到预期的安全标准。部署后,系统应定期进行安全评估和更新,及时修补已知漏洞,并应对新出现的安全威胁。
此外,系统应具备应急响应机制,能够在发生安全事件时迅速采取措施,最小化损失。应急响应计划应包括事件检测、分析、隔离、恢复和事后总结等环节,并定期进行演练,确保相关人员熟悉应急流程。
综上所述,系统安全性设计应从物理、网络、数据等多个层面进行综合考虑,确保系统在运行过程中能够有效抵御各种安全威胁,保障系统的稳定运行和数据的安全可靠。
3. 系统架构设计
低空模拟系统的架构设计旨在实现高效、可靠、可扩展的仿真环境,以满足低空飞行场景的多样化需求。系统采用分层架构设计,主要包括数据采集层、数据处理层、仿真引擎层、用户交互层和系统管理层。各层之间通过标准化的接口进行通信,确保系统的模块化和可维护性。
数据采集层负责从外部设备或传感器获取实时数据,包括气象数据、飞行器状态数据、地理信息数据等。数据采集模块支持多种数据源接入,如GPS、雷达、ADS-B等,并通过数据预处理模块对原始数据进行清洗和格式化,确保数据的准确性和一致性。数据处理层对采集到的数据进行进一步分析和处理,包括数据融合、异常检测和实时计算。数据处理模块采用分布式计算框架,支持高并发数据处理,确保系统在高负载情况下的稳定性。
仿真引擎层是系统的核心,负责模拟低空飞行场景的动态行为。仿真引擎采用基于物理模型的仿真算法,能够精确模拟飞行器的动力学特性、环境交互和突发事件。仿真引擎支持多飞行器协同仿真,并提供了丰富的场景配置接口,用户可以根据需求自定义飞行任务、环境条件和突发事件。仿真引擎还集成了实时碰撞检测和路径规划功能,确保仿真过程的安全性和真实性。
用户交互层提供了友好的图形用户界面(GUI)和命令行接口(CLI),用户可以通过界面实时监控仿真过程、调整参数和查看结果。用户交互层还支持多用户协同操作,允许多个用户同时参与仿真任务。系统管理层负责系统的配置、监控和维护,包括用户权限管理、系统日志记录和故障恢复。系统管理模块采用自动化运维技术,能够实时监控系统状态并自动处理异常情况,确保系统的高可用性。
为提升系统的可扩展性,系统架构设计采用了微服务架构,各功能模块以独立服务的形式运行,并通过消息队列和API网关进行通信。这种设计使得系统能够灵活地扩展功能模块,同时保持系统的整体稳定性。此外,系统还支持云平台部署,用户可以根据需求动态调整计算资源,进一步提升了系统的灵活性和可扩展性。
以下是系统架构的主要模块及其功能描述:
- 数据采集模块:负责从外部设备或传感器获取实时数据,支持多种数据源接入。
- 数据处理模块:对采集到的数据进行清洗、融合和实时计算,确保数据的准确性和一致性。
- 仿真引擎模块:基于物理模型模拟低空飞行场景,支持多飞行器协同仿真和实时碰撞检测。
- 用户交互模块:提供图形用户界面和命令行接口,支持多用户协同操作和实时监控。
- 系统管理模块:负责系统配置、监控和维护,支持自动化运维和故障恢复。
通过上述架构设计,低空模拟系统能够满足复杂低空飞行场景的仿真需求,同时具备高可靠性、可扩展性和易用性,为用户提供了一个功能强大且灵活的仿真平台。
3.1 总体架构
低空模拟系统的总体架构设计旨在实现一个高效、稳定且可扩展的仿真环境,以满足低空飞行场景的多样化需求。系统采用分层架构设计,主要包括数据采集层、数据处理层、仿真引擎层、用户交互层以及系统管理层。各层之间通过标准化的接口进行通信,确保系统的模块化和可维护性。
数据采集层负责从外部设备或传感器获取实时数据,包括飞行器状态、环境参数(如风速、温度、气压等)以及地理信息数据。这些数据通过高速数据总线传输至数据处理层,确保数据的实时性和准确性。数据处理层对原始数据进行清洗、滤波和融合,生成高质量的输入数据供仿真引擎层使用。数据处理层还具备数据缓存和重放功能,以支持离线仿真和历史数据分析。
仿真引擎层是系统的核心,负责模拟低空飞行环境中的物理行为、飞行器动力学以及环境交互。仿真引擎采用多线程并行计算技术,以提高计算效率,并支持多种飞行器模型的集成。仿真引擎层还提供实时仿真和加速仿真两种模式,以满足不同场景的需求。实时仿真模式适用于实时训练和测试,而加速仿真模式则适用于大规模场景的快速验证。
用户交互层为操作人员提供直观的图形用户界面(GUI),支持飞行器控制、场景配置、数据监控以及仿真结果的可视化。用户交互层还支持多用户协同操作,允许多个操作人员同时参与仿真任务。系统管理层负责系统的配置、监控和维护,确保系统的稳定运行。系统管理层还提供日志记录、故障诊断和性能优化功能,以支持系统的长期运行和维护。
- 数据采集层:实时获取飞行器状态、环境参数和地理信息数据。
- 数据处理层:清洗、滤波和融合原始数据,支持数据缓存和重放。
- 仿真引擎层:模拟低空飞行环境中的物理行为和飞行器动力学,支持实时和加速仿真模式。
- 用户交互层:提供图形用户界面,支持飞行器控制、场景配置和数据监控。
- 系统管理层:负责系统配置、监控和维护,提供日志记录和故障诊断功能。
通过上述架构设计,低空模拟系统能够有效支持低空飞行场景的仿真需求,具备高实时性、高精度和高可扩展性,适用于飞行训练、任务规划、设备测试等多种应用场景。
3.1.1 硬件架构
低空模拟系统的硬件架构设计是整个系统实现的基础,其核心目标是为系统提供稳定、高效、可扩展的硬件支持。硬件架构主要包括数据采集模块、数据处理模块、通信模块、存储模块以及显示与控制模块。各模块之间通过高速总线进行数据交互,确保系统的实时性和可靠性。
数据采集模块是硬件架构的输入端,负责获取低空环境中的各类传感器数据,包括但不限于气压、温度、湿度、风速、风向、GPS定位等信息。该模块采用多通道数据采集技术,支持并行处理,确保数据的高效采集和传输。传感器数据通过高精度ADC(模数转换器)进行数字化处理,并通过SPI或I2C接口与主控单元连接。为了应对复杂环境,数据采集模块还配备了抗干扰设计,确保在高电磁干扰环境下仍能稳定工作。
数据处理模块是硬件架构的核心,负责对采集到的数据进行实时处理和分析。该模块采用高性能嵌入式处理器(如ARM Cortex-A系列或多核DSP),支持多线程并行计算,能够快速完成数据滤波、融合、解算等任务。为了提高系统的实时性,数据处理模块还集成了FPGA(现场可编程门阵列),用于实现高速信号处理和算法加速。FPGA与主处理器之间通过PCIe或高速串行总线进行数据交互,确保数据传输的低延迟和高带宽。
通信模块负责系统内部各模块之间的数据交互以及与外部设备的数据传输。系统内部采用CAN总线或以太网进行通信,确保数据传输的可靠性和实时性。对于外部通信,系统支持多种通信协议,包括4G/5G、Wi-Fi、LoRa等,以满足不同应用场景的需求。通信模块还集成了数据加密功能,确保数据传输的安全性。
存储模块用于保存系统运行过程中产生的各类数据,包括原始传感器数据、处理后的数据以及系统日志等。该模块采用高速固态硬盘(SSD)作为主存储介质,支持大容量数据存储和快速读写。为了确保数据的可靠性,存储模块还配备了RAID(冗余阵列)技术,支持数据备份和容错。
显示与控制模块是硬件架构的输出端,负责将处理后的数据以图形化方式展示,并提供人机交互接口。该模块采用高分辨率触摸屏作为显示设备,支持多点触控和手势操作。控制模块集成了多种输入设备,如键盘、鼠标、旋钮等,方便用户进行操作。此外,显示与控制模块还支持远程控制功能,用户可以通过网络对系统进行远程监控和操作。
为了确保系统的可扩展性,硬件架构采用模块化设计,各模块之间通过标准接口进行连接。系统还预留了多个扩展接口,支持未来功能的升级和扩展。例如,可以通过增加传感器模块来扩展数据采集能力,或通过增加存储模块来提升数据存储容量。
以下是硬件架构中各模块的主要技术参数:
-
数据采集模块:
- 采样率:≥100kHz
- ADC分辨率:16位
- 接口类型:SPI/I2C
- 抗干扰能力:≥80dB
-
数据处理模块:
- 处理器类型:ARM Cortex-A53
- FPGA型号:Xilinx Zynq-7000
- 内存容量:4GB DDR4
- 数据传输带宽:≥10Gbps
-
通信模块:
- 内部通信:CAN总线/以太网
- 外部通信:4G/5G、Wi-Fi、LoRa
- 数据加密:AES-256
-
存储模块:
- 存储介质:SSD
- 存储容量:≥1TB
- RAID级别:RAID 1/RAID 5
-
显示与控制模块:
- 显示屏分辨率:1920x1080
- 触摸屏类型:电容式多点触控
- 远程控制协议:SSH/VNC
通过上述硬件架构设计,低空模拟系统能够实现高效、稳定、可扩展的运行,满足各类低空环境模拟的需求。
3.1.2 软件架构
低空模拟系统的软件架构设计采用分层架构模式,确保系统的模块化、可扩展性和可维护性。整体架构分为四层:用户界面层、应用逻辑层、数据处理层和基础设施层。每一层均通过标准接口进行通信,确保各层之间的松耦合性。
用户界面层负责与用户进行交互,提供直观的操作界面和数据可视化功能。该层采用响应式设计,支持多种终端设备(如PC、平板、移动设备)的访问。界面设计遵循用户体验(UX)最佳实践,确保操作简便性和信息展示的清晰性。主要功能模块包括飞行参数设置、实时监控、数据分析和报告生成等。
应用逻辑层是系统的核心,负责处理业务逻辑和算法实现。该层包括飞行模拟引擎、环境模拟模块、传感器数据处理模块和任务管理模块。飞行模拟引擎基于物理模型,模拟飞行器的动力学行为;环境模拟模块生成气象、地形等外部环境数据;传感器数据处理模块对模拟传感器数据进行实时处理和分析;任务管理模块负责飞行任务的规划、执行和监控。各模块通过消息队列进行异步通信,确保系统的高效运行。
数据处理层负责数据的存储、管理和分析。该层采用分布式数据库系统,支持海量数据的实时存储和查询。数据存储分为结构化数据(如飞行参数、任务记录)和非结构化数据(如传感器原始数据、日志文件)。数据分析模块基于大数据技术,提供实时分析和历史数据挖掘功能,支持飞行性能评估和故障诊断。
基础设施层为系统提供基础支持,包括硬件资源管理、网络通信和安全保障。硬件资源管理模块负责计算资源、存储资源和网络资源的动态分配和监控;网络通信模块采用高可靠性的通信协议,确保数据的实时传输和系统的稳定性;安全保障模块提供身份认证、数据加密和访问控制功能,确保系统的安全性。
为提升系统的可扩展性和灵活性,软件架构采用微服务架构设计。各功能模块以独立服务的形式部署,通过API网关进行统一管理和调度。服务间通信采用轻量级的RESTful API或gRPC协议,确保通信效率和兼容性。系统支持容器化部署,利用Kubernetes进行服务编排和资源管理,实现高可用性和弹性扩展。
- 用户界面层:提供直观的操作界面和数据可视化功能。
- 应用逻辑层:处理业务逻辑和算法实现,包括飞行模拟引擎、环境模拟模块等。
- 数据处理层:负责数据的存储、管理和分析,采用分布式数据库系统。
- 基础设施层:提供硬件资源管理、网络通信和安全保障。
通过上述架构设计,低空模拟系统能够实现高效、稳定和安全的运行,满足复杂飞行模拟任务的需求。
3.2 模块划分
低空模拟系统的模块划分主要基于功能需求和系统架构设计,确保各模块之间的独立性、可扩展性和高效性。系统整体划分为以下几个核心模块:数据采集模块、数据处理模块、模拟引擎模块、用户交互模块、通信模块和系统管理模块。
数据采集模块负责从外部传感器、GPS设备、气象站等数据源实时获取低空环境的相关数据,包括飞行器状态、气象条件、地形信息等。该模块需要具备高精度和高频率的数据采集能力,以确保模拟的真实性和实时性。数据采集模块的核心功能包括数据过滤、数据校验和数据缓存,确保输入数据的准确性和完整性。
数据处理模块是系统的核心计算单元,负责对采集到的原始数据进行预处理、分析和转换。该模块的主要任务包括数据清洗、数据融合、坐标转换和特征提取。数据处理模块需要支持多源数据的融合,例如将飞行器的姿态数据与气象数据进行关联分析,生成适合模拟引擎使用的标准化数据格式。为了提高系统的实时性,数据处理模块采用并行计算架构,确保在高负载情况下仍能保持高效运行。
模拟引擎模块是系统的核心模拟单元,负责根据处理后的数据生成低空环境的动态模拟场景。该模块包括飞行器动力学模型、气象模型、地形模型和碰撞检测模型。飞行器动力学模型基于物理引擎实现,能够精确模拟飞行器的运动状态;气象模型支持风速、温度、湿度等参数的动态变化;地形模型通过数字高程数据(DEM)生成三维地形;碰撞检测模型用于实时检测飞行器与障碍物的碰撞情况。模拟引擎模块需要具备高精度和高实时性,以确保模拟结果的可靠性。
用户交互模块提供用户与系统之间的接口,支持用户配置模拟参数、监控模拟过程和查看模拟结果。该模块包括图形用户界面(GUI)和命令行接口(CLI),支持多用户并发操作。用户可以通过GUI实时查看飞行器的状态、环境参数和模拟结果,也可以通过CLI进行批量任务配置和自动化操作。用户交互模块需要具备良好的用户体验和高响应速度,确保用户能够高效地完成操作。
通信模块负责系统内部各模块之间的数据传输以及与外部系统的通信。该模块采用分布式架构,支持高并发、低延迟的数据传输。通信协议采用标准化的消息格式,确保数据的兼容性和可扩展性。通信模块的核心功能包括数据路由、数据压缩和数据加密,确保数据传输的高效性和安全性。
系统管理模块负责系统的配置、监控和维护。该模块包括系统配置管理、日志管理、性能监控和故障诊断功能。系统配置管理支持动态调整系统参数,以适应不同的模拟需求;日志管理记录系统的运行状态和用户操作,便于后续分析和故障排查;性能监控实时监测系统的资源使用情况,确保系统的稳定运行;故障诊断功能能够自动检测系统中的异常情况,并提供相应的解决方案。
各模块之间的数据流和控制流如下所示:
通过上述模块划分,低空模拟系统能够实现高效、可靠的模拟功能,满足不同应用场景的需求。各模块之间的接口设计遵循标准化原则,确保系统的可扩展性和可维护性。
3.2.1 飞行控制模块
飞行控制模块是低空模拟系统的核心组成部分,负责实现飞行器的姿态控制、轨迹跟踪、导航定位以及飞行状态管理等功能。该模块通过接收传感器数据、外部指令以及环境信息,结合飞行器的动力学模型,实时计算并输出控制指令,确保飞行器在低空环境中的稳定飞行和任务执行。
飞行控制模块的主要功能包括姿态控制、速度控制、高度控制、航向控制以及轨迹跟踪。姿态控制通过调节飞行器的俯仰、滚转和偏航角,确保飞行器在三维空间中的姿态稳定。速度控制通过调节发动机推力或电机转速,维持飞行器的预设速度。高度控制通过调节升降舵或旋翼转速,确保飞行器在预设高度范围内飞行。航向控制通过调节方向舵或旋翼偏转角度,确保飞行器沿预设航向飞行。轨迹跟踪则通过实时计算飞行器与目标轨迹的偏差,生成相应的控制指令,确保飞行器能够精确跟踪预设轨迹。
飞行控制模块的输入包括传感器数据(如加速度计、陀螺仪、磁力计、气压计等)、导航数据(如GPS、IMU等)、外部指令(如遥控器指令、地面站指令等)以及环境信息(如风速、风向、温度等)。输出则包括控制指令(如舵机控制信号、电机控制信号等)以及飞行状态信息(如当前姿态、速度、高度、航向等)。
飞行控制模块的核心算法包括PID控制、LQR控制、模糊控制以及自适应控制等。PID控制通过比例、积分和微分三个环节,实现对飞行器姿态、速度和高度等参数的精确控制。LQR控制通过优化控制器的设计,实现对飞行器状态的最优控制。模糊控制通过模糊逻辑推理,实现对复杂非线性系统的控制。自适应控制则通过实时调整控制参数,适应飞行器动力学模型的变化。
飞行控制模块的硬件实现主要包括飞行控制器、传感器模块、执行机构以及通信模块。飞行控制器通常采用高性能的嵌入式处理器,如ARM Cortex-M系列或DSP处理器,以满足实时计算的需求。传感器模块包括加速度计、陀螺仪、磁力计、气压计等,用于采集飞行器的姿态、速度、高度和航向等信息。执行机构包括舵机、电机等,用于执行控制指令。通信模块包括无线通信模块和有线通信模块,用于与地面站或其他飞行器进行数据交换。
飞行控制模块的软件实现主要包括控制算法、状态估计、故障诊断以及数据记录等功能。控制算法负责根据输入数据和预设目标,生成控制指令。状态估计通过卡尔曼滤波或扩展卡尔曼滤波等算法,对飞行器的状态进行估计和预测。故障诊断通过实时监测飞行器的状态和传感器数据,及时发现并处理故障。数据记录则通过存储飞行器的状态数据和传感器数据,为后续分析和优化提供依据。
飞行控制模块的性能指标包括控制精度、响应速度、稳定性以及鲁棒性等。控制精度指飞行器实际状态与目标状态之间的偏差,通常要求控制在厘米级或毫米级。响应速度指飞行器从接收到控制指令到执行完毕的时间,通常要求控制在毫秒级。稳定性指飞行器在受到外部干扰或内部参数变化时,仍能保持稳定飞行的能力。鲁棒性指飞行器在复杂环境或不确定条件下,仍能保持良好控制性能的能力。
飞行控制模块的测试与验证主要包括仿真测试、地面测试以及飞行测试。仿真测试通过建立飞行器的动力学模型和环境模型,在计算机上进行虚拟飞行测试。地面测试通过将飞行器固定在测试平台上,进行实际控制指令的测试。飞行测试则通过在实际低空环境中进行飞行,验证飞行控制模块的性能和可靠性。
飞行控制模块的优化与改进主要包括算法优化、硬件升级以及软件更新等。算法优化通过改进控制算法或引入新的控制策略,提高控制精度和响应速度。硬件升级通过采用更高性能的处理器或传感器,提高系统的计算能力和数据采集精度。软件更新通过修复已知问题或增加新功能,提高系统的稳定性和可靠性。
飞行控制模块的维护与保养主要包括定期检查、故障排查以及软件升级等。定期检查通过定期对飞行控制器、传感器模块、执行机构以及通信模块进行检查,确保其正常工作。故障排查通过实时监测飞行器的状态和传感器数据,及时发现并处理故障。软件升级通过定期更新飞行控制模块的软件,修复已知问题或增加新功能。
飞行控制模块的安全性与可靠性主要包括冗余设计、故障容错以及安全机制等。冗余设计通过采用双处理器、双传感器或双执行机构等,提高系统的可靠性。故障容错通过实时监测飞行器的状态和传感器数据,及时发现并处理故障,确保飞行器的安全飞行。安全机制通过设置飞行器的安全边界和紧急降落程序,确保飞行器在遇到紧急情况时能够安全降落。
飞行控制模块的集成与协同主要包括与其他模块的接口设计、数据交换以及任务协同等。接口设计通过定义飞行控制模块与其他模块之间的接口协议,确保数据的准确传输。数据交换通过实时交换飞行器的状态数据和传感器数据,确保各模块之间的协同工作。任务协同通过根据任务需求,协调飞行控制模块与其他模块的工作,确保任务的顺利完成。
飞行控制模块的未来发展方向主要包括智能化、自主化以及网络化等。智能化通过引入人工智能算法,提高飞行控制模块的自主决策能力。自主化通过提高飞行控制模块的自主飞行能力,减少对外部指令的依赖。网络化通过将多个飞行控制模块组成网络,实现多飞行器的协同飞行和任务执行。
3.2.2 环境模拟模块
环境模拟模块是低空模拟系统的核心组成部分之一,主要负责模拟飞行器在低空环境中的各种气象条件和地理环境。该模块通过高精度的数据采集与处理,结合实时仿真技术,能够为飞行器提供逼真的低空飞行体验。模块的主要功能包括气象条件模拟、地形地貌模拟、障碍物模拟以及动态环境变化模拟。
在气象条件模拟方面,模块能够模拟风速、风向、温度、湿度、气压等多种气象参数的变化。这些参数可以通过预设的数学模型或实时数据输入进行动态调整,以模拟不同季节、不同地域的气象特征。例如,模块可以模拟强风、暴雨、大雾等极端天气条件,帮助飞行器测试其在恶劣环境下的性能表现。
地形地貌模拟部分则通过高分辨率的地理信息系统(GIS)数据,构建真实的地形模型。模块支持多种地形类型,包括平原、山地、丘陵、湖泊等,并能够根据飞行器的位置实时更新地形数据。此外,模块还支持动态地形变化模拟,如地震、滑坡等自然灾害对地形的影响,以测试飞行器在复杂地形条件下的适应能力。
障碍物模拟是环境模拟模块的另一重要功能。模块能够模拟建筑物、树木、电线杆等常见障碍物,并根据飞行器的飞行路径动态生成障碍物分布。障碍物的高度、形状、材质等参数均可自定义,以模拟不同场景下的飞行环境。模块还支持动态障碍物模拟,如移动的车辆、飞鸟等,以测试飞行器在动态环境中的避障能力。
动态环境变化模拟是环境模拟模块的高级功能,能够模拟环境参数的实时变化。例如,模块可以模拟风速的突然变化、温度的急剧下降等突发情况,以测试飞行器在动态环境中的响应速度和稳定性。此外,模块还支持多飞行器协同模拟,能够模拟多个飞行器在同一环境中的交互行为,以测试飞行器在复杂环境中的协同能力。
为了实现上述功能,环境模拟模块采用了分布式架构设计,各子模块之间通过高速网络进行数据交换。模块的核心处理单元采用高性能计算平台,能够实时处理大量的环境数据,并生成高精度的仿真结果。模块还支持与外部系统的无缝集成,能够接收来自气象站、卫星等外部数据源的实时数据,以提高模拟的准确性。
在数据管理方面,环境模拟模块采用了分层存储架构,将静态数据(如地形数据)和动态数据(如气象数据)分别存储在不同的存储层中,以提高数据访问效率。模块还支持数据压缩和加密技术,以确保数据的安全性和传输效率。
环境模拟模块的性能指标如下:
- 气象参数模拟精度:风速±0.1m/s,温度±0.1℃,湿度±1%,气压±0.1hPa
- 地形分辨率:1米
- 障碍物模拟精度:高度±0.1米,位置±0.1米
- 动态环境变化响应时间:<100ms
通过上述设计,环境模拟模块能够为低空模拟系统提供高度逼真的环境仿真,满足飞行器在低空环境中的测试需求。
3.2.3 数据采集模块
数据采集模块是低空模拟系统的核心组成部分之一,负责实时获取飞行器状态、环境参数以及用户输入等多源数据。该模块的设计需确保数据的准确性、实时性和完整性,以满足系统对飞行模拟的高精度要求。数据采集模块主要包括传感器数据采集、外部设备数据接口以及数据预处理三个部分。
首先,传感器数据采集部分负责从飞行器的各类传感器中获取数据。这些传感器包括但不限于惯性测量单元(IMU)、全球定位系统(GPS)、气压计、空速管等。IMU用于采集飞行器的姿态角(俯仰、滚转、偏航)和角速度信息,GPS提供飞行器的位置、速度和时间信息,气压计和空速管则分别用于测量高度和空速。传感器数据的采集频率需根据飞行模拟的实时性要求进行配置,通常IMU的采样频率不低于100Hz,GPS的采样频率不低于10Hz。
其次,外部设备数据接口部分负责与飞行模拟器的外部设备进行数据交互。这些外部设备包括操纵杆、脚蹬、油门杆等用户输入设备,以及飞行控制计算机、通信模块等。操纵杆和脚蹬用于采集飞行员的操纵输入,油门杆用于采集发动机推力设置。数据接口需支持多种通信协议,如RS-232、RS-422、CAN总线等,以确保与不同设备的兼容性。数据接口的通信速率需满足实时性要求,通常不低于1Mbps。
最后,数据预处理部分负责对采集到的原始数据进行滤波、校准和格式转换等处理,以提高数据的质量和可用性。滤波算法通常采用卡尔曼滤波或低通滤波,以去除传感器噪声和干扰。校准过程包括传感器零偏校准、比例因子校准和非线性补偿等,以确保数据的准确性。格式转换将不同传感器和设备的数据统一为系统内部使用的标准格式,便于后续的数据处理和分析。
数据采集模块的设计需考虑以下关键点:
- 数据采集的实时性:确保数据采集频率和通信速率满足飞行模拟的实时性要求。
- 数据的准确性:通过滤波和校准等手段提高数据的精度和可靠性。
- 系统的兼容性:支持多种传感器和外部设备的接口协议,确保系统的扩展性和灵活性。
- 数据的安全性:采用冗余设计和数据校验机制,防止数据丢失或错误。
通过以上设计,数据采集模块能够为低空模拟系统提供高质量、实时的多源数据,为飞行模拟的精确性和真实性奠定基础。
3.2.4 用户界面模块
用户界面模块是低空模拟系统的核心组成部分之一,负责为用户提供直观、易用的操作界面,确保用户能够高效地与系统进行交互。该模块的设计需充分考虑用户的操作习惯和需求,同时兼顾系统的功能复杂性和性能要求。用户界面模块主要包括以下几个功能单元:系统状态显示、参数配置、任务管理、数据可视化以及用户权限管理。
系统状态显示单元用于实时展示系统的运行状态,包括飞行器的位置、速度、高度、姿态等关键信息。通过图形化界面,用户可以直观地了解当前系统的运行情况。该单元支持多视图切换功能,用户可以根据需求选择不同的视图模式,如二维平面视图、三维立体视图或仪表盘视图。此外,系统状态显示单元还支持告警功能,当系统检测到异常情况时,能够通过颜色变化、声音提示等方式及时通知用户。
参数配置单元允许用户对系统的各项参数进行设置和调整。该单元采用分层配置的方式,将参数分为基础参数、高级参数和自定义参数三类。基础参数包括飞行器的初始位置、目标点、飞行速度等;高级参数涉及飞行控制算法、传感器校准等;自定义参数则允许用户根据特定需求进行个性化设置。参数配置单元还支持参数导入和导出功能,用户可以将配置好的参数保存为文件,便于后续使用或分享。
任务管理单元用于创建、编辑和执行飞行任务。用户可以通过该单元定义任务的起点、终点、路径点以及任务类型(如侦察、巡逻、运输等)。任务管理单元支持任务模板功能,用户可以将常用的任务配置保存为模板,以便快速调用。此外,该单元还提供任务仿真功能,用户可以在执行任务前进行仿真测试,确保任务的可行性和安全性。
数据可视化单元负责将系统采集到的数据进行图形化展示,帮助用户更好地理解和分析数据。该单元支持多种数据展示方式,如折线图、柱状图、散点图等。用户可以根据需求选择不同的图表类型,并对图表进行缩放、平移、标注等操作。数据可视化单元还支持数据导出功能,用户可以将图表数据导出为Excel、CSV等格式,便于进一步分析。
用户权限管理单元用于控制不同用户对系统的访问权限。该单元采用基于角色的权限管理机制,将用户分为管理员、操作员和观察员三类。管理员拥有系统的最高权限,可以对系统进行全面的配置和管理;操作员可以执行飞行任务和查看系统状态,但无法修改系统参数;观察员只能查看系统状态和数据,无法进行任何操作。用户权限管理单元还支持日志记录功能,系统会自动记录用户的操作行为,便于后续审计和追踪。
用户界面模块的设计需遵循以下原则:
- 易用性:界面布局简洁明了,操作流程清晰,减少用户的学习成本。
- 响应速度:确保界面操作的实时性,避免因系统延迟影响用户体验。
- 可扩展性:模块设计应具备良好的扩展性,便于后续功能的添加和升级。
- 安全性:通过严格的权限管理和日志记录,确保系统的安全性和数据的保密性。
通过以上设计,用户界面模块能够为用户提供高效、便捷的操作体验,同时确保系统的稳定性和安全性。
4. 硬件设计
低空模拟系统的硬件设计是整个系统实现的基础,其核心目标是确保系统能够稳定、高效地模拟低空环境,并为用户提供真实的操作体验。硬件设计主要包括传感器模块、数据处理单元、通信模块、电源管理模块以及执行机构等部分。
传感器模块是系统的感知层,负责采集低空环境中的各类数据。主要包括气压传感器、温度传感器、湿度传感器、风速传感器以及GPS模块。气压传感器用于测量高度变化,精度需达到±0.1 hPa;温度传感器和湿度传感器用于监测环境温湿度,精度分别需达到±0.5℃和±3% RH;风速传感器用于测量风速和风向,精度需达到±0.5 m/s;GPS模块用于定位,精度需达到±2.5米。所有传感器数据通过I2C或SPI接口传输至数据处理单元。
数据处理单元是系统的核心,负责对传感器数据进行实时处理和分析。采用高性能嵌入式处理器,如ARM Cortex-A系列,主频不低于1.5 GHz,配备至少4 GB RAM和32 GB存储空间。处理器需支持多线程并行处理,以满足实时性要求。数据处理单元还需集成FPGA模块,用于实现高速信号处理和算法加速。数据处理单元通过以太网或CAN总线与通信模块连接,确保数据传输的稳定性和实时性。
通信模块负责系统与外部设备的数据交互,包括地面站、无人机或其他终端设备。通信模块采用双频段设计,支持2.4 GHz和5.8 GHz频段,传输速率不低于100 Mbps。通信协议采用TCP/IP或UDP协议,确保数据传输的可靠性和低延迟。通信模块还需支持加密功能,保障数据的安全性。
电源管理模块为系统提供稳定的电力供应。采用锂聚合物电池作为主电源,容量不低于5000 mAh,支持快速充电和过充保护。电源管理模块需集成DC-DC转换器,将电池电压转换为系统所需的多种电压等级(如3.3 V、5 V、12 V)。电源管理模块还需具备低功耗模式,以延长系统的工作时间。
执行机构是系统的输出层,负责根据处理结果执行相应的动作。主要包括电机、舵机和LED指示灯。电机用于模拟飞行器的动力系统,转速范围需达到0-10000 RPM;舵机用于控制飞行器的姿态,响应时间需小于0.1秒;LED指示灯用于显示系统状态,支持多种颜色和闪烁模式。执行机构通过PWM信号或CAN总线与数据处理单元连接,确保控制的精确性和实时性。
为确保系统的可靠性和稳定性,硬件设计还需考虑以下因素:
- 抗干扰设计:所有电路板需采用多层PCB设计,并增加屏蔽层,以减少电磁干扰。
- 散热设计:在数据处理单元和电源管理模块中增加散热片和风扇,确保系统在高负载下仍能稳定运行。
- 环境适应性:所有硬件设备需通过IP67防护等级认证,确保在恶劣环境下仍能正常工作。
通过以上硬件设计,低空模拟系统能够实现高精度、高可靠性的低空环境模拟,为用户提供真实的操作体验。
4.1 飞行模拟器
飞行模拟器是低空模拟系统的核心组件之一,旨在为飞行员提供高度逼真的飞行体验。其硬件设计主要包括座舱结构、运动平台、视觉显示系统、操纵装置以及计算与控制系统。座舱结构采用轻量化高强度材料,确保其耐久性和安全性,同时内部布局严格按照真实飞行器设计,包括仪表盘、座椅、踏板等,以提供沉浸式体验。座舱外部配备多自由度运动平台,能够模拟飞行中的俯仰、滚转、偏航等动作,运动平台采用液压或电动驱动,确保响应速度和精度。
视觉显示系统采用高分辨率投影仪或多屏拼接技术,提供180度至360度的全景视野,确保飞行员在模拟飞行过程中能够获得真实的视觉反馈。投影仪的分辨率不低于4K,刷新率需达到120Hz以上,以减少画面延迟和撕裂现象。此外,系统支持动态天气模拟、昼夜切换以及地形细节渲染,进一步提升沉浸感。
操纵装置包括操纵杆、油门杆、方向舵踏板等,均采用力反馈技术,能够根据飞行状态实时调整反馈力度,模拟真实飞行中的操纵感受。操纵装置的精度和响应时间需满足航空标准,确保飞行员能够准确感知飞行状态的变化。
计算与控制系统是飞行模拟器的大脑,采用高性能多核处理器和专用图形处理单元(GPU),确保实时计算和渲染能力。系统支持多种飞行模型和场景模拟,能够根据用户需求快速切换。数据采集模块实时记录飞行参数,包括高度、速度、姿态等,并通过网络接口与外部系统进行数据交互。
- 座舱结构:轻量化高强度材料,真实飞行器布局
- 运动平台:多自由度,液压或电动驱动
- 视觉显示系统:高分辨率投影仪,全景视野,动态天气模拟
- 操纵装置:力反馈技术,高精度,快速响应
- 计算与控制系统:高性能处理器,实时计算,数据采集与交互
飞行模拟器的硬件设计需严格遵循航空标准,确保其可靠性和安全性。所有组件均需经过严格的测试和校准,以确保在实际使用中能够稳定运行。通过以上设计,飞行模拟器能够为飞行员提供高度逼真的训练环境,满足低空模拟系统的需求。
4.1.1 飞行控制台
飞行控制台作为飞行模拟器的核心组件之一,其设计需满足高精度、高可靠性和易操作性的要求。控制台的主要功能是模拟真实飞行器的操作环境,为飞行员提供逼真的操作体验。控制台的设计包括硬件布局、控制设备选型、信号处理模块以及人机交互界面等部分。
首先,控制台的硬件布局需符合人体工程学设计,确保飞行员在长时间操作中不会感到疲劳。控制台的主要操作设备包括操纵杆、油门杆、方向舵踏板、襟翼控制杆以及各种开关和按钮。这些设备的布局应尽量接近真实飞行器的操作面板,以确保飞行员能够快速适应模拟环境。操纵杆和油门杆采用高精度霍尔传感器,确保操作的灵敏度和准确性。方向舵踏板采用力反馈技术,模拟真实飞行中的脚舵反馈力。
其次,控制台的信号处理模块负责将飞行员的操作信号转换为模拟器能够识别的数字信号。信号处理模块采用高速微处理器,确保信号的实时性和准确性。操纵杆、油门杆和方向舵踏板的信号通过CAN总线传输至主控计算机,主控计算机根据接收到的信号实时调整飞行模拟器的状态。信号处理模块还需具备抗干扰能力,确保在高电磁干扰环境下仍能稳定工作。
控制台的人机交互界面采用高分辨率触摸屏,显示飞行参数、导航信息、系统状态等内容。触摸屏的界面设计需简洁直观,确保飞行员能够快速获取所需信息。触摸屏的刷新率不低于60Hz,以避免画面卡顿或延迟。此外,控制台还需配备语音识别模块,支持飞行员通过语音指令进行操作,进一步提升操作的便捷性。
为了确保控制台的可靠性,所有关键部件均需经过严格的测试和验证。操纵杆、油门杆和方向舵踏板的寿命测试需达到100万次操作以上,确保在长时间使用中不会出现故障。信号处理模块的稳定性测试需在高温、低温、高湿等极端环境下进行,确保在各种条件下均能正常工作。
控制台的电源管理模块采用冗余设计,确保在主电源故障时能够无缝切换到备用电源,避免因电源问题导致模拟器停机。电源管理模块还需具备过压、过流保护功能,确保控制台在异常情况下能够安全运行。
- 操纵杆:高精度霍尔传感器,寿命测试≥100万次
- 油门杆:高精度霍尔传感器,寿命测试≥100万次
- 方向舵踏板:力反馈技术,寿命测试≥100万次
- 信号处理模块:高速微处理器,CAN总线传输
- 人机交互界面:高分辨率触摸屏,刷新率≥60Hz
- 电源管理模块:冗余设计,过压、过流保护
通过以上设计,飞行控制台能够为飞行员提供高度逼真的操作体验,确保飞行模拟器的训练效果达到预期目标。
4.1.2 运动平台
运动平台是飞行模拟器的核心组件之一,负责模拟飞行器在空中的各种运动状态,包括俯仰、滚转、偏航、升降、前后和侧向运动。为了实现高精度的运动模拟,运动平台通常采用六自由度(6-DOF)并联机构,也称为Stewart平台。该平台由六个液压或电动执行器组成,通过精确控制每个执行器的伸缩,可以实现平台在空间中的复杂运动。
运动平台的设计需要考虑以下几个关键因素:
-
负载能力:运动平台需要承载飞行模拟器的座舱、飞行员以及相关设备的总重量。根据模拟器的规模和应用场景,负载能力通常在500kg至2000kg之间。设计时需确保平台在最大负载下仍能保持稳定的运动性能。
-
运动范围:运动平台的运动范围决定了其能够模拟的飞行姿态和加速度范围。典型的运动范围如下:
- 俯仰:±30°
- 滚转:±30°
- 偏航:±30°
- 升降:±0.5m
- 前后:±0.5m
- 侧向:±0.5m
-
动态响应:运动平台的动态响应速度直接影响模拟器的真实感。通常要求平台能够在50ms内完成从静止到最大加速度的响应,以确保飞行员能够感受到与真实飞行一致的运动反馈。
-
精度与重复性:运动平台的运动精度和重复性是衡量其性能的重要指标。通常要求平台的位置控制精度在±0.1mm以内,角度控制精度在±0.1°以内,以确保模拟器能够精确再现飞行器的各种姿态变化。
-
安全性与可靠性:运动平台的设计必须考虑安全性和可靠性。平台应配备紧急停止装置和过载保护功能,以防止在异常情况下对飞行员和设备造成伤害。此外,平台的关键部件应采用冗余设计,以提高系统的可靠性。
-
控制算法:运动平台的控制算法是实现高精度运动模拟的关键。通常采用基于逆运动学的控制算法,通过实时计算每个执行器的伸缩量,实现平台在空间中的精确运动。控制算法还需考虑平台的动态特性,如惯性、摩擦和弹性变形等,以提高系统的响应速度和稳定性。
-
维护与校准:运动平台在使用过程中需要定期维护和校准,以确保其长期稳定运行。维护内容包括液压系统的油液更换、执行器的润滑和磨损检查等。校准工作则包括平台的位置和角度校准,以确保其运动精度和重复性。
通过以上设计,运动平台能够为飞行员提供高度真实的飞行体验,确保飞行模拟器在训练和测试中的有效性和可靠性。
4.1.3 视觉系统
视觉系统是飞行模拟器中至关重要的组成部分,旨在为飞行员提供高度逼真的外部环境视觉反馈。该系统通过高分辨率显示设备、图像生成器和投影系统,模拟飞行过程中所见的真实场景,包括地形、天气、机场、建筑物及其他飞行器。视觉系统的设计需满足高帧率、低延迟和高分辨率的要求,以确保飞行员的沉浸感和操作准确性。
首先,视觉系统的核心是图像生成器(IG),它负责实时生成高精度的三维场景。图像生成器通常采用多通道渲染技术,支持多屏拼接和视场角扩展,以满足宽视场角的需求。图像生成器的性能直接影响视觉系统的帧率和延迟,因此需选择具备强大计算能力的硬件平台,如基于GPU的高性能计算集群。图像生成器的输出分辨率应至少达到4K,帧率不低于60Hz,以确保画面的流畅性和细节表现力。
其次,视觉系统的显示设备通常采用多屏拼接或球幕投影技术。多屏拼接方案通过多个高分辨率显示器组合成一个无缝的大屏幕,覆盖飞行员的视野范围。球幕投影方案则通过投影仪将图像投射到球形屏幕上,提供更广阔的视场角和更高的沉浸感。无论采用哪种方案,显示设备的亮度和对比度需满足飞行模拟的需求,通常要求亮度不低于500cd/m²,对比度不低于1000:1。
为了进一步提升视觉系统的真实感,需集成动态环境效果,如天气变化、昼夜交替和光影效果。天气变化包括雨、雪、雾等,需通过粒子系统和光照模型实现。昼夜交替则通过动态调整光照强度和色温来模拟。光影效果包括阴影、反射和折射,需通过实时光线追踪技术实现。这些效果的实现需依赖高性能的图像生成器和优化的渲染算法。
视觉系统的校准和同步也是关键环节。多屏拼接或球幕投影方案需确保各显示单元之间的色彩一致性和几何对齐。色彩一致性通过色彩管理工具实现,几何对齐则通过边缘融合和几何校正技术实现。此外,视觉系统需与飞行模拟器的其他子系统(如运动平台和操纵系统)保持严格的时间同步,通常采用高精度的时间同步协议(如PTP)实现。
视觉系统的性能指标需满足以下要求:
- 分辨率:≥4K(3840×2160)
- 帧率:≥60Hz
- 延迟:≤50ms
- 视场角:水平≥180°,垂直≥60°
- 亮度:≥500cd/m²
- 对比度:≥1000:1
综上所述,视觉系统的设计需综合考虑图像生成、显示设备、环境效果和系统校准等多个方面,以确保其在高帧率、低延迟和高分辨率的前提下,为飞行员提供高度逼真的视觉体验。
4.2 环境模拟设备
环境模拟设备是低空模拟系统的核心组成部分,旨在为飞行器提供逼真的低空飞行环境。该设备主要包括风洞系统、气压控制系统、温湿度调节系统以及光照模拟系统。风洞系统采用多级可调速风机,能够模拟从0.5 m/s到50 m/s的风速范围,满足不同飞行场景的需求。风洞内部设计为可调节的流道结构,确保气流均匀分布,减少湍流对飞行器的影响。气压控制系统通过高精度气压传感器和伺服阀实现,能够在海拔0至5000米范围内精确调节气压,误差控制在±0.5 hPa以内。温湿度调节系统采用模块化设计,支持温度范围-20°C至50°C,湿度范围10%至95%RH,确保模拟环境与真实低空条件高度一致。光照模拟系统则通过高亮度LED阵列实现,支持从黎明到黄昏的全天候光照变化,亮度调节范围为0至100,000 lux,光谱范围覆盖400nm至700nm。
为了确保环境模拟设备的稳定性和可靠性,系统配备了多重冗余设计。例如,风洞系统采用双风机并联结构,当一台风机出现故障时,另一台风机可自动接管工作。气压控制系统则配备了备用气源和快速切换装置,确保在突发情况下气压调节的连续性。温湿度调节系统采用分布式控制策略,每个模块独立运行,避免单点故障影响整体性能。光照模拟系统则通过多通道控制,确保光照强度和光谱分布的均匀性。
环境模拟设备的控制软件基于实时操作系统开发,支持多任务并行处理。用户可通过图形化界面设置风速、气压、温湿度及光照参数,系统自动完成环境调节并实时监控运行状态。软件还支持预设场景模式,用户可根据需求快速切换不同的环境条件。此外,系统具备数据记录功能,能够保存每次模拟的运行数据,便于后续分析和优化。
以下是环境模拟设备的主要技术参数:
- 风速范围:0.5 m/s 至 50 m/s
- 气压范围:0 至 5000 米(对应气压:1013.25 hPa 至 540 hPa)
- 温度范围:-20°C 至 50°C
- 湿度范围:10% 至 95%RH
- 光照强度:0 至 100,000 lux
- 光谱范围:400nm 至 700nm
环境模拟设备的安装与调试需严格按照操作手册进行。风洞系统的安装需确保风机与流道之间的密封性,避免气流泄漏。气压控制系统的调试需通过标准气压计进行校准,确保测量精度。温湿度调节系统的安装需注意模块之间的连接,避免冷热不均。光照模拟系统的调试需使用光谱分析仪,确保光照强度和光谱分布符合设计要求。
综上所述,环境模拟设备通过高精度控制和多重冗余设计,能够为低空模拟系统提供稳定、可靠的飞行环境,满足各类飞行器的测试需求。
4.2.1 气象模拟器
气象模拟器是低空模拟系统中用于模拟各种气象条件的关键设备,旨在为飞行器提供真实的气象环境测试条件。其核心功能包括模拟风速、风向、温度、湿度、气压、降水、能见度等多种气象参数,以确保飞行器在不同气象条件下的性能和安全性。气象模拟器主要由以下几个模块组成:风场模拟模块、温湿度控制模块、气压调节模块、降水模拟模块和能见度调节模块。
风场模拟模块通过高精度风扇阵列和风向调节装置实现风速和风向的精确控制。风扇阵列采用变频调速技术,风速范围可覆盖0.5 m/s至30 m/s,风向调节装置可实现0°至360°无级调节,满足不同飞行场景的需求。温湿度控制模块采用恒温恒湿技术,温度调节范围为-20°C至50°C,湿度调节范围为10%至95%RH,确保模拟器能够在极端气候条件下运行。气压调节模块通过真空泵和气压传感器实现气压的精确控制,气压范围可模拟海拔-500米至5000米的环境。
降水模拟模块通过高压喷淋系统和雾化装置实现不同强度的降雨和雾化效果。降雨强度可调节范围为0.1 mm/h至50 mm/h,雾化装置可生成不同粒径的水雾,模拟从轻雾到浓雾的多种能见度条件。能见度调节模块通过控制雾化装置的输出和风场模拟模块的配合,实现能见度从10米至10公里的连续调节。
气象模拟器的控制系统采用分布式架构,各模块通过工业以太网与中央控制单元连接,实现数据的实时采集和指令的精确下发。中央控制单元配备高性能处理器和专用气象模拟软件,支持多种气象场景的预设和自定义配置。用户可通过人机交互界面实时监控和调整各项参数,确保模拟过程的准确性和可重复性。
为确保气象模拟器的可靠性和安全性,设备采用多重保护机制,包括过载保护、温度保护、湿度保护和气压保护等。所有模块均通过严格的EMC(电磁兼容性)测试,确保在复杂电磁环境下的稳定运行。此外,设备还配备了故障诊断系统,能够实时检测并记录运行状态,便于维护和故障排查。
气象模拟器的技术参数如下:
- 风速范围:0.5 m/s至30 m/s
- 风向调节范围:0°至360°
- 温度调节范围:-20°C至50°C
- 湿度调节范围:10%至95%RH
- 气压调节范围:-500米至5000米海拔
- 降雨强度范围:0.1 mm/h至50 mm/h
- 能见度调节范围:10米至10公里
气象模拟器的设计充分考虑了实际应用需求,能够为飞行器的研发和测试提供高精度、高可靠性的气象环境模拟服务。
4.2.2 地形模拟器
地形模拟器是低空模拟系统中的关键组件之一,主要用于模拟飞行器在不同地形条件下的飞行环境。其核心功能是通过高精度的地形数据生成和实时渲染,为飞行器提供逼真的地形反馈。地形模拟器的硬件设计主要包括地形数据库、数据处理单元、显示系统和运动平台四个部分。
地形数据库是地形模拟器的基础,存储了高分辨率的地形高程数据、地表纹理和地理信息。数据来源包括卫星遥感、航空摄影测量和地面测绘等多种方式。数据库采用分层存储结构,支持动态加载和卸载,以确保在飞行过程中能够快速响应用户操作和飞行器位置变化。数据处理单元负责对地形数据进行实时解算和优化,采用高性能GPU和多核CPU并行处理架构,确保地形渲染的流畅性和精度。数据处理单元还集成了地形碰撞检测算法,能够实时计算飞行器与地形的相对位置,避免虚拟碰撞。
显示系统是地形模拟器的输出端,通常采用多通道投影系统或高分辨率LED屏幕。投影系统通过多台投影仪拼接实现大范围的地形显示,支持无缝融合和边缘校正技术,确保显示效果的一致性。LED屏幕则具有更高的亮度和对比度,适合在强光环境下使用。显示系统的刷新率不低于60Hz,延迟控制在20ms以内,以保证飞行员的视觉体验和操作响应。
运动平台是地形模拟器的物理反馈部分,通过六自由度运动平台模拟飞行器在不同地形上的姿态变化。运动平台采用液压或电动驱动,能够实现高精度的位置和角度控制。平台的控制系统与地形数据库和数据处理单元实时同步,确保运动反馈与地形变化的一致性。运动平台的最大负载能力需根据飞行器的重量和尺寸进行设计,通常支持500kg至2000kg的负载范围。
地形模拟器的性能指标如下:
- 地形分辨率:≤1米
- 数据处理延迟:≤20ms
- 显示刷新率:≥60Hz
- 运动平台自由度:6
- 最大负载能力:500kg-2000kg
地形模拟器的设计还需考虑系统的可扩展性和兼容性。例如,地形数据库应支持多种数据格式的导入和导出,以便与其他仿真系统进行数据交换。数据处理单元和显示系统应具备模块化设计,便于后期升级和维护。运动平台的控制系统应支持多种通信协议,确保与飞行器仿真软件的兼容性。
地形模拟器的安装和调试需严格按照技术规范进行。安装过程中需确保各组件之间的连接可靠,避免信号干扰和数据丢失。调试阶段需对地形数据的加载速度、显示效果和运动反馈进行多次测试,确保系统达到设计要求。此外,还需定期对地形模拟器进行维护和校准,以保证其长期稳定运行。
4.3 数据采集设备
数据采集设备是低空模拟系统的核心组成部分,负责实时采集飞行器状态、环境参数以及传感器数据,确保系统能够准确反映低空飞行的动态特性。数据采集设备主要包括传感器模块、信号调理模块、数据采集卡和数据处理单元。
传感器模块用于采集飞行器的姿态、速度、加速度、高度、气压、温度等关键参数。常用的传感器包括三轴加速度计、三轴陀螺仪、磁力计、气压计和温度传感器。这些传感器通过I2C、SPI或UART接口与信号调理模块连接,确保数据的高精度和实时性。
信号调理模块负责对传感器输出的模拟信号进行放大、滤波和隔离处理,以提高信号的信噪比和抗干扰能力。信号调理模块通常包括多路模拟开关、可编程增益放大器(PGA)和低通滤波器。通过合理的电路设计,信号调理模块能够有效抑制高频噪声和电磁干扰,确保采集到的数据准确可靠。
数据采集卡是数据采集设备的核心硬件,负责将调理后的模拟信号转换为数字信号,并通过高速接口(如PCIe或USB)传输至数据处理单元。数据采集卡应具备多通道同步采样能力,采样率不低于100kHz,分辨率不低于16位,以满足低空飞行模拟的高动态范围需求。此外,数据采集卡应支持实时触发和定时采集功能,确保数据采集的同步性和一致性。
数据处理单元负责对采集到的数据进行实时处理和存储。数据处理单元通常采用高性能嵌入式处理器或FPGA,具备强大的计算能力和并行处理能力。数据处理单元的主要任务包括数据滤波、数据融合、状态估计和数据存储。数据滤波采用卡尔曼滤波或扩展卡尔曼滤波算法,用于消除传感器噪声和漂移;数据融合通过多传感器信息融合算法,提高飞行器状态估计的精度;状态估计采用惯性导航算法,实时计算飞行器的位置、速度和姿态;数据存储采用高速固态硬盘(SSD),确保数据的完整性和可追溯性。
数据采集设备的硬件设计需考虑以下关键参数:
- 传感器精度:加速度计精度±0.01g,陀螺仪精度±0.1°/s,气压计精度±0.1hPa,温度传感器精度±0.5℃。
- 信号调理带宽:0-10kHz,增益可调范围1-1000倍。
- 数据采集卡采样率:100kHz,分辨率16位,通道数≥16。
- 数据处理单元计算能力:≥1GFLOPS,存储容量≥1TB。
数据采集设备的硬件设计需遵循以下原则:
- 高可靠性:采用工业级元器件,确保设备在恶劣环境下稳定运行。
- 低功耗:优化电路设计,降低设备功耗,延长使用寿命。
- 模块化设计:各功能模块独立设计,便于维护和升级。
- 抗干扰设计:采用屏蔽、滤波和隔离技术,提高设备的抗干扰能力。
通过以上设计,数据采集设备能够满足低空模拟系统对高精度、高可靠性和实时性的要求,为飞行模拟提供可靠的数据支持。
4.3.1 传感器
在低空模拟系统的数据采集设备中,传感器作为核心组件,承担着实时监测和记录环境及飞行状态数据的关键任务。传感器的选型与配置直接决定了数据采集的精度、响应速度以及系统的整体性能。为了满足低空模拟系统的高精度需求,传感器应具备高灵敏度、低噪声、宽动态范围以及良好的环境适应性。
首先,传感器的选型需根据具体的测量需求进行。例如,气压传感器用于测量飞行高度,应选择具有高分辨率和低漂移特性的型号,以确保在不同海拔和气候条件下的测量精度。温度传感器则需具备快速响应和宽温域适应性,以应对低空环境中可能出现的剧烈温度变化。此外,加速度传感器和陀螺仪用于监测飞行姿态和运动状态,应选择具有高带宽和低噪声的型号,以确保在高动态环境下的数据准确性。
传感器的安装位置和布局也至关重要。为了减少测量误差,传感器应尽量靠近被测对象,并避免受到机械振动、电磁干扰等外部因素的影响。例如,气压传感器应安装在飞行器的静压孔附近,以确保测量结果的准确性;加速度传感器和陀螺仪则应安装在飞行器的重心附近,以减少因飞行器姿态变化引起的测量误差。
在数据采集过程中,传感器的信号处理电路同样需要精心设计。信号调理电路应包括滤波、放大和模数转换等功能,以消除噪声并提高信号的信噪比。此外,为了确保数据的实时性和同步性,传感器的采样频率应与系统的整体采样频率保持一致,并通过硬件或软件方式实现多传感器的同步采集。
为了进一步提高系统的可靠性,传感器应具备自诊断和故障检测功能。例如,可以通过内置的温度补偿电路和自校准功能,减少环境变化对测量结果的影响;同时,通过实时监测传感器的输出信号,可以及时发现并处理传感器故障,避免因传感器失效导致的数据丢失或错误。
- 气压传感器:高分辨率、低漂移,适用于高度测量。
- 温度传感器:快速响应、宽温域适应性,适用于环境温度监测。
- 加速度传感器:高带宽、低噪声,适用于飞行姿态监测。
- 陀螺仪:高精度、低漂移,适用于角速度测量。
以下为方案原文截图


















 3796
3796

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











