




 该博客介绍了如何在Windows7环境下使用Python3.6实现PPP/L2TP/PPTP拨号的重拨功能,并获取拨号后的公网IP及归属地信息。程序会统计拨号次数、失败次数和成功但无网络的次数,结果保存到ip_result.txt文件。使用者需预先配置好拨号连接并确保可以正常连接。
该博客介绍了如何在Windows7环境下使用Python3.6实现PPP/L2TP/PPTP拨号的重拨功能,并获取拨号后的公网IP及归属地信息。程序会统计拨号次数、失败次数和成功但无网络的次数,结果保存到ip_result.txt文件。使用者需预先配置好拨号连接并确保可以正常连接。
1.程序制作原因:
需要对拨号的公网IP量进行统计
2.所需环境:
windows7,python3.6
3.程序的功能:
①实现pppoe,l2tp,pptp的重拨
②实现获取拨号成功后的实际公网IP
③统计拨号的总次数,拨号失败的次数,拨号成功没有网络的次数
④将获取到的公网IP及IP的归属地信息写入到文档ip_result.txt中(文件位于程序目录下)
4.最终效果图:
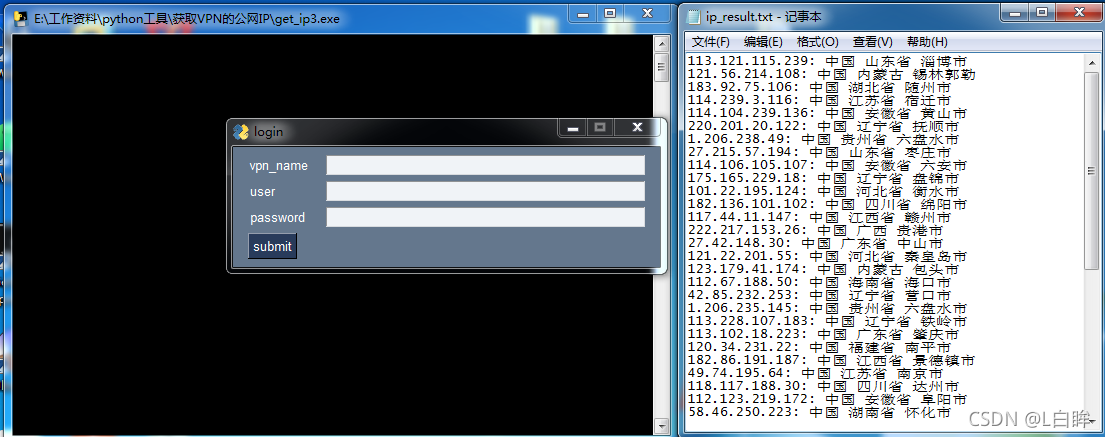
5.使用方法:
需先在windows系统设置好拨号的连接配置并手动测试一下是否能连接,成功之后再运行程序
6.完整代码如下(get_ip3.py):
import requests
import os
import re
import time
import subprocess
import PySimpleGUI as sg
# coding=gbk
vpn_count = 0
ip_faild_count = 0
radial_faild_count = 0
without_ip_count = 0
def ping():
cmd = 'ping -n 3 -w 1 114.114.114.114'
ret = subprocess 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









