




 博客介绍了手眼标定相关常用术语,如位姿、工具坐标系等。阐述了手眼标定的作用,即让机器人手眼结合实现智能交互。还介绍了Eye-to-Hand和Eye-in-Hand两种手眼系统,指出后者更稳定、适合工业机器人,其标定可归结为方程AX=XB求解。
博客介绍了手眼标定相关常用术语,如位姿、工具坐标系等。阐述了手眼标定的作用,即让机器人手眼结合实现智能交互。还介绍了Eye-to-Hand和Eye-in-Hand两种手眼系统,指出后者更稳定、适合工业机器人,其标定可归结为方程AX=XB求解。
常用术语:
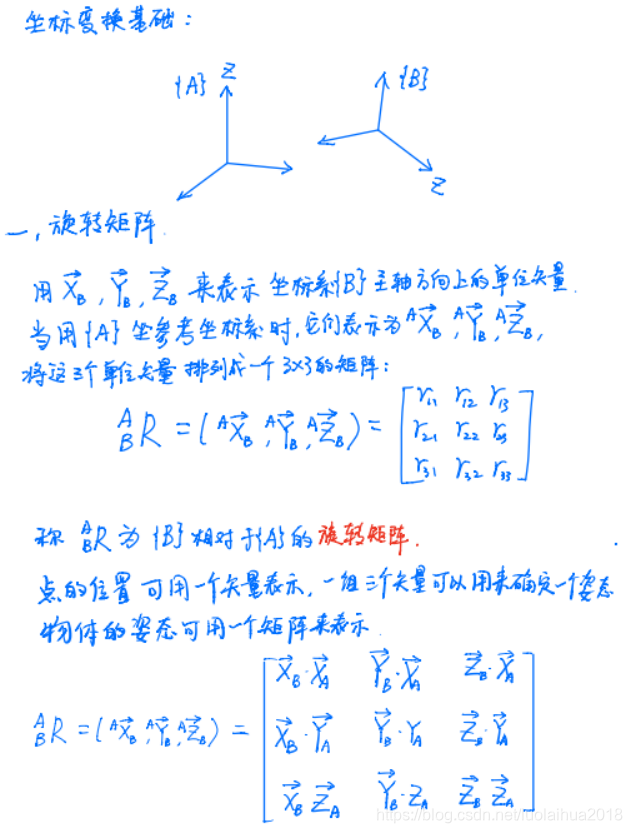
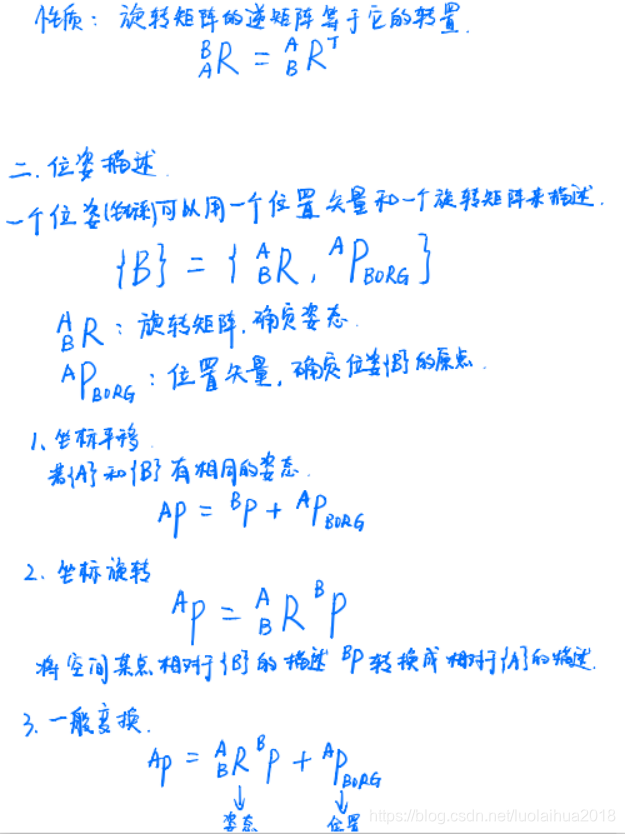
位姿:位置与姿态,为了描述空间物体的位置与姿态,我们一般先在物体上设置一个坐标系(位姿)。
工具坐标系:我们通常采用设置于机器末端执行器上的工具坐标系(相对于设置于操作臂固定底座的基坐标系)来描述操作臂的位置。
TCP:工具中心点,Tool Central Point。操作点。
手眼标定的作用
将机器人的行为与机器人视觉传感器有机的结合到一起,通过运算使得机器人的手眼成为一个整体,使得机器人的手部可以与眼部获得的外部信息进行智能的动态交互。
Eye-to-Hand
是指机械臂与摄像机分离,通过设置在机器人外侧的摄像机,监测机器人的状态以及规定范围内的目标物位置,从而控制机器人进行规定的作业任务。但是摄像机的安装位置,很难确定,过近过远都会对作业任务产生影响,因此这种视觉系统并不常用。
Eye-in-Hand手眼系统
由于同步的运动,使得相机可以对三维空间内的目标进行更准确的观测,同时不会因为机械臂的大幅度运动导致遮挡或者位姿关系计算精度下降等问题。因此大多数工业机器人选取更加稳定的Eye-in-Hand手眼系统。由于随着机械臂与目标距离变小,Eye-in-Hand系统的摄像机也会离目标越来越近,这样摄像机测量的绝对误差会越来越小,因此Eye-in-Hand系统更适合于工业机器人。
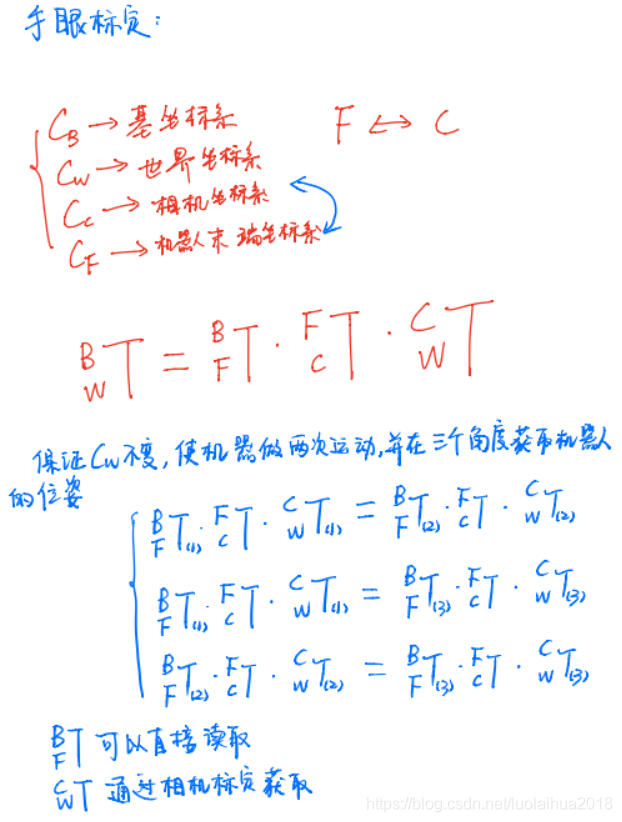
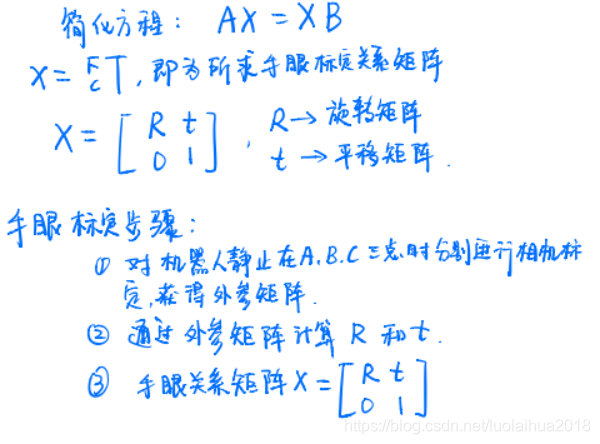
Eye-in-Hand手眼系统的标定可以归结为对方程AX=XB求解,并且对这个问题已经有了很多成熟的解决办法。Tsai等人通过不同位置拍摄的不同位姿,以此解出方程AX=XB求的解。
假设A、B、C分别代表人的眼、脑、手,那么在知道眼和脑的关系,以及脑和手的关系,就可以计算出出眼和手的关系。类比到机器人系统,相机是A可以计算出像素坐标、机械手是C可以得到空间坐标,因此标定的过程其实就是像素坐标与空间坐标间的转换过程。


















 2271
2271

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











