




源代码地址: https://github.com/openasic-org/xk265
帧内预测具体逻辑包含在代码xk265\rtl\rec\rec_intra\intra_pred.v 文件中。
module intra_pred() 看起来是每次计算某个4x4块的预测像素值。
以下代码用来算每个pred_angle的具体数值,每个mode_i对应的pred_angle参考下图所示:
module intra_pred( ... )
...
//lookup table to get pred_angle
always @( * ) begin
case (mode_i)
2 ,34:pred_angle=7'd32; 11,25:pred_angle=-7'd2;
3 ,33:pred_angle=7'd26; 12,24:pred_angle=-7'd5;
4 ,32:pred_angle=7'd21; 13,23:pred_angle=-7'd9;
5 ,31:pred_angle=7'd17; 14,22:pred_angle=-7'd13;
6 ,30:pred_angle=7'd13; 15,21:pred_angle=-7'd17;
7 ,29:pred_angle=7'd9; 16,20:pred_angle=-7'd21;
8 ,28:pred_angle=7'd5; 17,19:pred_angle=-7'd26;
9 ,27:pred_angle=7'd2; 18: pred_angle=-7'd32;
10,26:pred_angle=7'd0;
default:pred_angle=7'd0;
endcase
end 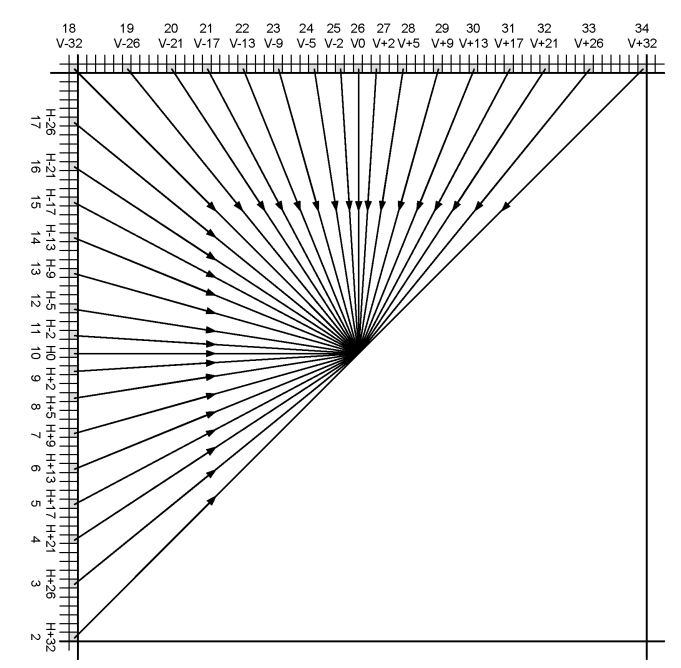
以下代码用于获取当前4x4块的第一行四个像素在大块中的水平位置,其中size_i用于表示大块的大小。
//********************************************************************************
//get the location information of current 4x4 block
always @( * ) begin//x
case(size_i)
2'b00:begin//4x4
x0='d0; x1='d1; x2='d2; x3='d3;
end
2'b01:begin//8x8
if(!i4x4_x_i[0]) begin
x0='d0; x1='d1; x2='d2; x3='d3;
end
else begin
x0='d4; x1='d5; x2='d6; x3='d7;
end
end
2'b10:begin//16x16
case(i4x4_x_i[1:0])
2'b00:begin
x0='d0; x1='d1; x2='d2; x3='d3;
end
2'b01:begin
x0='d4; x1='d5; x2='d6; x3='d7;
end
2'b10:begin
x0='d8; x1='d9; x2='d10; x3='d11;
end
2'b11:begin
x0='d12; x1='d13; x2='d14; x3='d15;
end
endcase
end
2'b11:begin//32x32
case(i4x4_x_i[2:0])
3'b000:begin
x0='d0; x1='d1; x2='d2; x3='d3;
end
3'b001:begin
x0='d4; x1='d5; x2='d6; x3='d7;
end
3'b010:begin
x0='d8; x1='d9; x2='d10; x3='d11;
end
3'b011:begin
x0='d12; x1='d13; x2='d14; x3='d15;
end
3'b100:begin
x0='d16; x1='d17; x2='d18; x3='d19;
end
3'b101:begin
x0='d20; x1='d21; x2='d22; x3='d23;
end
3'b110:begin
x0='d24; x1='d25; x2='d26; x3='d27;
end
3'b111:begin
x0='d28; x1='d29; x2='d30; x3='d31;
end
endcase
end
endcase
end以下代码用于获取当前4x4块的第一列四个像素在大块中的垂直位置,其中size_i用于表示大块的大小。
always @( * ) begin//y
case(size_i)
2'b00:begin//4x4
y0='d0; y1='d1; y2='d2; y3='d3;
end
2'b01:begin//8x8
if(!i4x4_y_i[0]) begin
y0='d0; y1='d1; y2='d2; y3='d3;
end
else begin
y0='d4; y1='d5; y2='d6; y3='d7;
end
end
2'b10:begin//16x16
case(i4x4_y_i[1:0])
2'b00:begin
y0='d0; y1='d1; y2='d2; y3='d3;
end
2'b01:begin
y0='d4; y1='d5; y2='d6; y3='d7;
end
2'b10:begin
y0='d8; y1='d9; y2='d10; y3='d11;
end
2'b11:begin
y0='d12; y1='d13; y2='d14; y3='d15;
end
endcase
end
2'b11:begin//32x32
case(i4x4_y_i[2:0])
3'b000:begin
y0='d0; y1='d1; y2='d2; y3='d3;
end
3'b001:begin
y0='d4; y1='d5; y2='d6; y3='d7;
end
3'b010:begin
y0='d8; y1='d9; y2='d10; y3='d11;
end
3'b011:begin
y0='d12; y1='d13; y2='d14; y3='d15;
end
3'b100:begin
y0='d16; y1='d17; y2='d18; y3='d19;
end
3'b101:begin
y0='d20; y1='d21; y2='d22; y3='d23;
end
3'b110:begin
y0='d24; y1='d25; y2='d26; y3='d27;
end
3'b111:begin
y0='d28; y1='d29; y2='d30; y3='d31;
end
endcase
end
endcase
end
以下代码用于选择参考像素的位置: model_i >=18,则参考水平像素行,否则参考垂直像素列,具体细节可以参考下图。
always @(posedge clk or negedge rst_n) begin//help to choose the reference pixel
if(!rst_n) begin
delta_idx_r <= 'd0;
end
else begin
if(mode_i>=18)
delta_idx_r <= {1'b0,x0};
else
delta_idx_r <= {1'b0,y0};
end
end
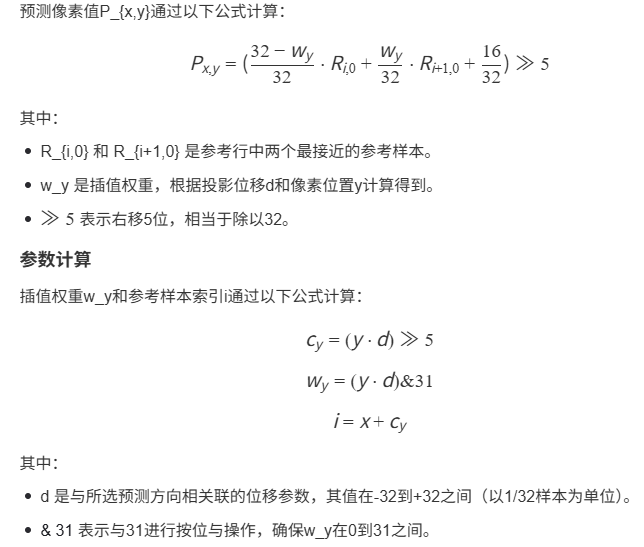
以下代码用于计算加权factor和偏移量idx,原理可以参考HM或者论文Intra Coding of the HEVC Standard。
预测像素值P_{x,y}通过以下公式计算:
//*********************************************************************************
//calculate idx and ifact for intra prediction
// 将 x0~x3 和 y0~y3 的值进行符号扩展(sign extension),确保它们在后续计算中不会因为位宽不足而丢失精度。
assign x0_sign_w={1'b0,x0}; // 在x0最高位前添加一个0,变为无符号数;
assign x1_sign_w={1'b0,x1};
assign x2_sign_w={1'b0,x2};
assign x3_sign_w={1'b0,x3};
assign y0_sign_w={1'b0,y0};
assign y1_sign_w={1'b0,y1};
assign y2_sign_w={1'b0,y2};
assign y3_sign_w={1'b0,y3};
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
fact0<='d0; idx0<='d0;
fact1<='d0; idx1<='d0;
fact2<='d0; idx2<='d0;
fact3<='d0; idx3<='d0;
end
else begin
if (mode_i >= 18) begin
fact0<=((y0+1)*pred_angle);
fact1<=((y1+1)*pred_angle);
fact2<=((y2+1)*pred_angle);
fact3<=((y3+1)*pred_angle);
idx0<=((y0_sign_w+1)*pred_angle)>>>5;
idx1<=((y1_sign_w+1)*pred_angle)>>>5;
idx2<=((y2_sign_w+1)*pred_angle)>>>5;
idx3<=((y3_sign_w+1)*pred_angle)>>>5;
end
else begin
fact0<=((x0+1)*pred_angle);
fact1<=((x1+1)*pred_angle);
fact2<=((x2+1)*pred_angle);
fact3<=((x3+1)*pred_angle);
idx0<=((x0_sign_w+1)*pred_angle)>>>5;
idx1<=((x1_sign_w+1)*pred_angle)>>>5;
idx2<=((x2_sign_w+1)*pred_angle)>>>5;
idx3<=((x3_sign_w+1)*pred_angle)>>>5;
end
end
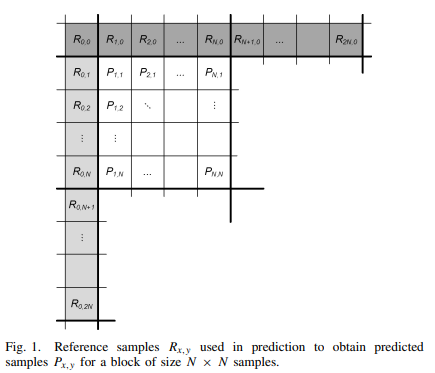
end以下代码用于将输入的预测像素排到ref_lxx_w和ref_txx_w寄存器中。ref_l0_w到ref_lN-1_w 从输入的ref_lN-1_i中拷贝, ref_lN_w到ref_l2N-1_w 从输入的ref_b0N_i中拷贝,因为参考像素的行和列的宽度是块大小的两倍(如下图所示)。
//**********************************************************************************
//get the real reference pixel
always @( * ) begin
ref_l00_w = 'd0; ref_l04_w = 'd0; ref_l08_w = 'd0; ref_l12_w = 'd0; ref_l16_w = 'd0; ref_l20_w = 'd0; ref_l24_w = 'd0; ref_l28_w = 'd0;
ref_l01_w = 'd0; ref_l05_w = 'd0; ref_l09_w = 'd0; ref_l13_w = 'd0; ref_l17_w = 'd0; ref_l21_w = 'd0; ref_l25_w = 'd0; ref_l29_w = 'd0;
ref_l02_w = 'd0; ref_l06_w = 'd0; ref_l10_w = 'd0; ref_l14_w = 'd0; ref_l18_w = 'd0; ref_l22_w = 'd0; ref_l26_w = 'd0; ref_l30_w = 'd0;
ref_l03_w = 'd0; ref_l07_w = 'd0; ref_l11_w = 'd0; ref_l15_w = 'd0; ref_l19_w = 'd0; ref_l23_w = 'd0; ref_l27_w = 'd0; ref_l31_w = 'd0;
ref_l32_w = 'd0; ref_l36_w = 'd0; ref_l40_w = 'd0; ref_l44_w = 'd0; ref_l48_w = 'd0; ref_l52_w = 'd0; ref_l56_w = 'd0; ref_l60_w = 'd0;
ref_l33_w = 'd0; ref_l37_w = 'd0; ref_l41_w = 'd0; ref_l45_w = 'd0; ref_l49_w = 'd0; ref_l53_w = 'd0; ref_l57_w = 'd0; ref_l61_w = 'd0;
ref_l34_w = 'd0; ref_l38_w = 'd0; ref_l42_w = 'd0; ref_l46_w = 'd0; ref_l50_w = 'd0; ref_l54_w = 'd0; ref_l58_w = 'd0; ref_l62_w = 'd0;
ref_l35_w = 'd0; ref_l39_w = 'd0; ref_l43_w = 'd0; ref_l47_w = 'd0; ref_l51_w = 'd0; ref_l55_w = 'd0; ref_l59_w = 'd0; ref_l63_w = 'd0;
ref_t00_w = 'd0; ref_t04_w = 'd0; ref_t08_w = 'd0; ref_t12_w = 'd0; ref_t16_w = 'd0; ref_t20_w = 'd0; ref_t24_w = 'd0; ref_t28_w = 'd0;
ref_t01_w = 'd0; ref_t05_w = 'd0; ref_t09_w = 'd0; ref_t13_w = 'd0; ref_t17_w = 'd0; ref_t21_w = 'd0; ref_t25_w = 'd0; ref_t29_w = 'd0;
ref_t02_w = 'd0; ref_t06_w = 'd0; ref_t10_w = 'd0; ref_t14_w = 'd0; ref_t18_w = 'd0; ref_t22_w = 'd0; ref_t26_w = 'd0; ref_t30_w = 'd0;
ref_t03_w = 'd0; ref_t07_w = 'd0; ref_t11_w = 'd0; ref_t15_w = 'd0; ref_t19_w = 'd0; ref_t23_w = 'd0; ref_t27_w = 'd0; ref_t31_w = 'd0;
ref_t32_w = 'd0; ref_t36_w = 'd0; ref_t40_w = 'd0; ref_t44_w = 'd0; ref_t48_w = 'd0; ref_t52_w = 'd0; ref_t56_w = 'd0; ref_t60_w = 'd0;
ref_t33_w = 'd0; ref_t37_w = 'd0; ref_t41_w = 'd0; ref_t45_w = 'd0; ref_t49_w = 'd0; ref_t53_w = 'd0; ref_t57_w = 'd0; ref_t61_w = 'd0;
ref_t34_w = 'd0; ref_t38_w = 'd0; ref_t42_w = 'd0; ref_t46_w = 'd0; ref_t50_w = 'd0; ref_t54_w = 'd0; ref_t58_w = 'd0; ref_t62_w = 'd0;
ref_t35_w = 'd0; ref_t39_w = 'd0; ref_t43_w = 'd0; ref_t47_w = 'd0; ref_t51_w = 'd0; ref_t55_w = 'd0; ref_t59_w = 'd0; ref_t63_w = 'd0;
case(size_i)
2'b00:begin
ref_l00_w = ref_l00_i; ref_l04_w = ref_d00_i; ref_t00_w = ref_t00_i; ref_t04_w = ref_r00_i;
ref_l01_w = ref_l01_i; ref_l05_w = ref_d01_i; ref_t01_w = ref_t01_i; ref_t05_w = ref_r01_i;
ref_l02_w = ref_l02_i; ref_l06_w = ref_d02_i; ref_t02_w = ref_t02_i; ref_t06_w = ref_r02_i;
ref_l03_w = ref_l03_i; ref_l07_w = ref_d03_i; ref_t03_w = ref_t03_i; ref_t07_w = ref_r03_i;
end
2'b0 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 956
956

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











