



IJRR’24&RSS‘23 Diffusion Policy Visuomotor Policy Learning via Action Diffusion
0 引言
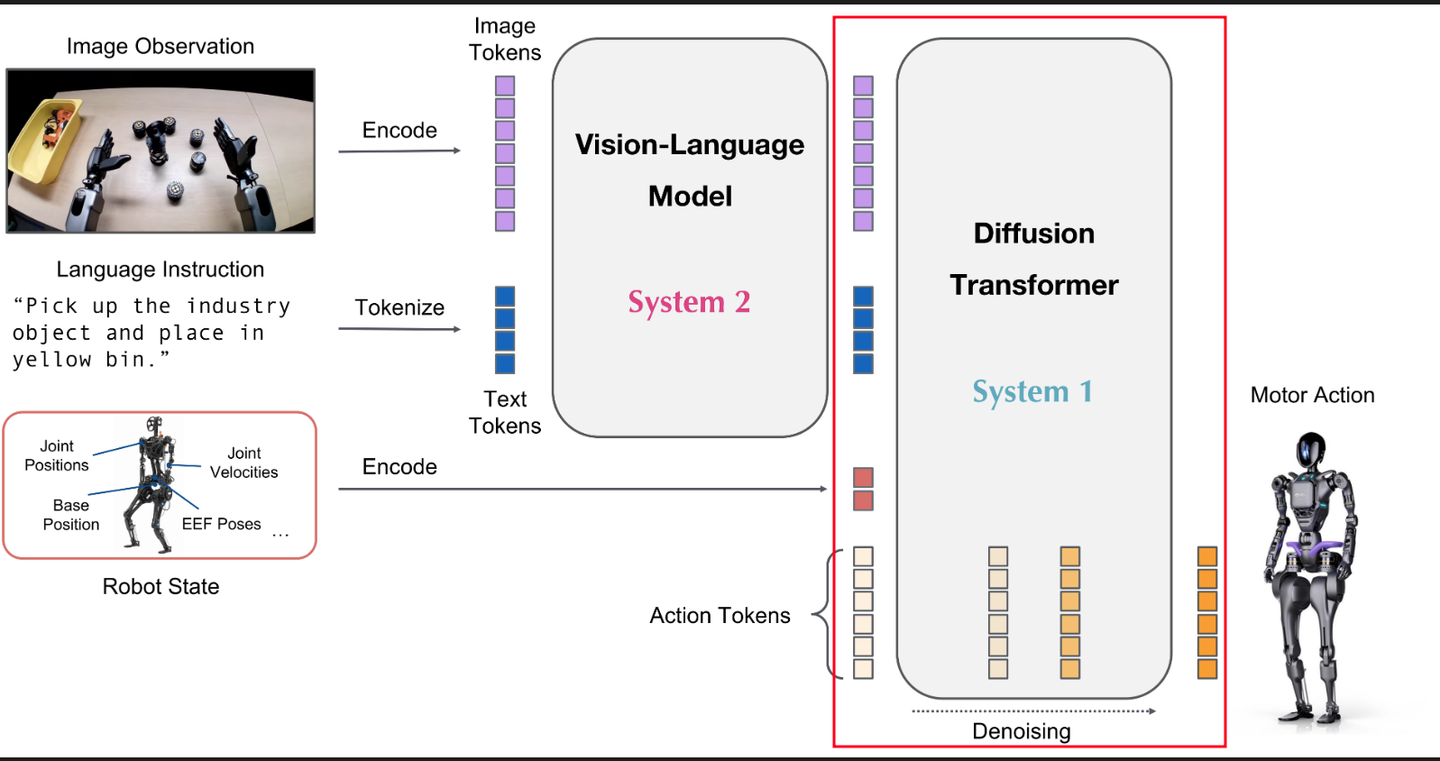
为什么很多vla的动作输出头都是用扩散策略呢,这大概是来源于一篇很重要的论文Diffusion Policy: Visuomotor Policy Learning via Action Diffusion.
1 简介
本文介绍了Diffusion Policy,一种通过条件去噪扩散过程表示机器人视觉运动策略的新方法。在4个不同机器人操作基准的15个任务中,Diffusion Policy consistently outperforms existing state-of-the-art methods,平均性能提升46.9%。该方法学习行动分布分数函数的梯度,并通过随机朗之万动力学步骤在推理期间优化该梯度场。
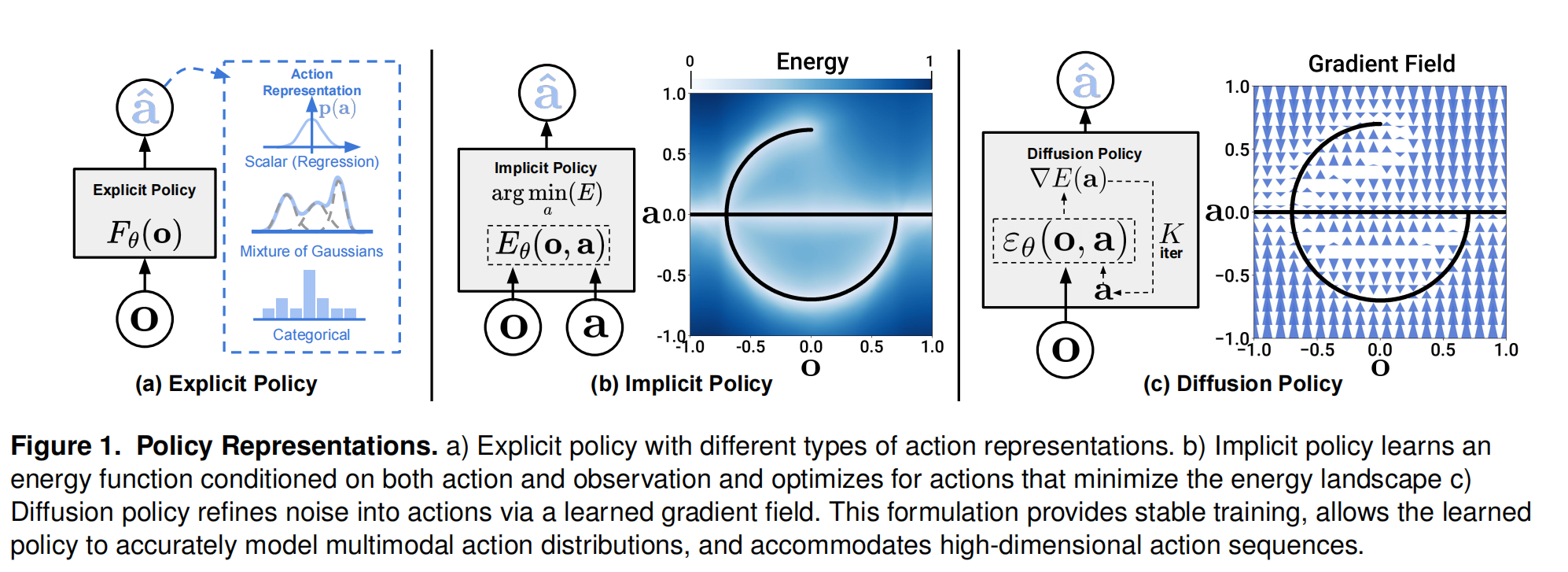
与显式策略(相当于直接学习一个状态到动作的映射函数/控制器)和隐式策略(相当于学习一个关于观测和动作的能量/评价函数,引导策略向能量最小的地方去,类似Q学习和D学习)不同,扩散策略学习一个将噪声引导至动作的向量场,这样的方式能够使模型准确的对多模态动作分布进行建模,并适应高维动作序列。
2 Diffusion Policy Formulation
2.1 DDPM
生成过程被视为从高斯噪声开始的迭代去噪(Stochastic Langevin Dynamics)。
核心公式:
x
k
−
1
=
α
(
x
k
−
γ
ϵ
θ
(
x
k
,
k
)
+
N
(
0
,
σ
2
I
)
)
x^{k-1}=\alpha (x^k-\gamma \epsilon_{\theta}(x^k,k)+N(0,\sigma^2I))
xk−1=α(xk−γϵθ(xk,k)+N(0,σ2I))
上述公式也可以用一个简单的噪声梯度下降代替:
x
′
=
x
−
γ
∇
E
(
x
)
x'=x-\gamma \nabla E(x)
x′=x−γ∇E(x)
其中,噪声预测网络
ϵ
θ
(
x
k
,
k
)
\epsilon_{\theta}(x^k,k)
ϵθ(xk,k)用来预测梯度场
∇
E
(
x
)
\nabla E(x)
∇E(x),
γ
\gamma
γ是学习率
2.2 DDPM训练过程
训练过程从抽取未加噪声的样本开始
x
0
x^0
x0,然后选择去噪的第k次迭代的噪声
ϵ
k
\epsilon^k
ϵk,噪声预测网络的训练目标函数为:
L
=
M
S
E
(
ϵ
k
,
ϵ
θ
(
x
0
+
ϵ
k
,
k
)
)
L = MSE(\epsilon^k,\epsilon_{\theta}(x^0+\epsilon^k,k))
L=MSE(ϵk,ϵθ(x0+ϵk,k))
噪声预测网络
ϵ
θ
\epsilon_{\theta}
ϵθ的输入为加噪k步之后的数据
x
k
=
x
0
+
ϵ
k
x^k=x^0+\epsilon^k
xk=x0+ϵk和去噪迭代步数k,
ϵ
θ
\epsilon_{\theta}
ϵθ旨在预测添加到
x
0
x^0
x0 中的噪声
2.2.1 细节描述
ϵ
k
\epsilon^k
ϵk被定义为在第 k 次去噪迭代中添加的高斯噪声
ϵ
k
∼
N
(
0
,
σ
k
2
I
)
\epsilon^k \sim N(0,\sigma^2_{k}I)
ϵk∼N(0,σk2I)
其中方差
σ
k
\sigma_k
σk是一个依赖于当前去噪迭代步数k的值,由噪声调度决定。
噪声调度是扩散模型的核心设计之一,它定义了方差如何随着去噪步数的变化而变化。
2.2.2 噪声调度
噪声调度是一组预定义的参数,用于控制扩散过程中每一步的噪声水平。它不仅仅是定义方差 σ k 2 σ_k^2 σk2,通常还关联着另外两个关键参数 α k α_k αk和 γ k γ_k γk。这些参数都是迭代步 k的函数。
- σ k 2 σ_k^2 σk2:添加的噪声方差。它决定了在第 k步时,向数据中添加的噪声的强度。
- α k α_k αk:保留信号的比例因子。它控制着在去噪步骤中保留多少上一步的信号。
- γ k γ_k γk :梯度步长的学习率。它控制了根据预测的梯度(噪声)更新当前值的步长大小。
- x k − 1 = α ( x k − γ ϵ θ ( x k , k ) + N ( 0 , σ 2 I ) ) x^{k-1}=\alpha (x^k-\gamma \epsilon_{\theta}(x^k,k)+N(0,\sigma^2I)) xk−1=α(xk−γϵθ(xk,k)+N(0,σ2I)) :这个公式可以理解为:新的、更干净的估计 x k − 1 x_{k−1} xk−1是由上一轮估计 x k x_k xk的衰减值,减去一个基于预测梯度的修正项,再加上一个小的随机噪声扰动构成的。噪声调度就是为每一步 k定义 ( α k , γ k , σ k ) (α_k,γ_k,σ_k) (αk,γk,σk)这个三元组。
2.3 DDPM推理过程
- 初始噪声采样:从标准高斯分布中采样一个初始噪声作为起点,可以将其理解为 ε k ε^k εk,但此时方差 σ k 2 σ_k^2 σk2通常被设置为1(或接近1),因为这是噪声最大的状态。
- 迭代去噪:执行 x k − 1 = α ( x k − γ ϵ θ ( x k , k ) + N ( 0 , σ 2 I ) ) x^{k-1}=\alpha (x^k-\gamma \epsilon_{\theta}(x^k,k)+N(0,\sigma^2I)) xk−1=α(xk−γϵθ(xk,k)+N(0,σ2I)),在每一步去噪中,会重新注入一个方差更小的新噪声。这样做是为了防止结果收敛到一个单一的模(mode),从而保持生成动作的多模态性。
2.4 Diffusion for Visuomotor Policy Learning
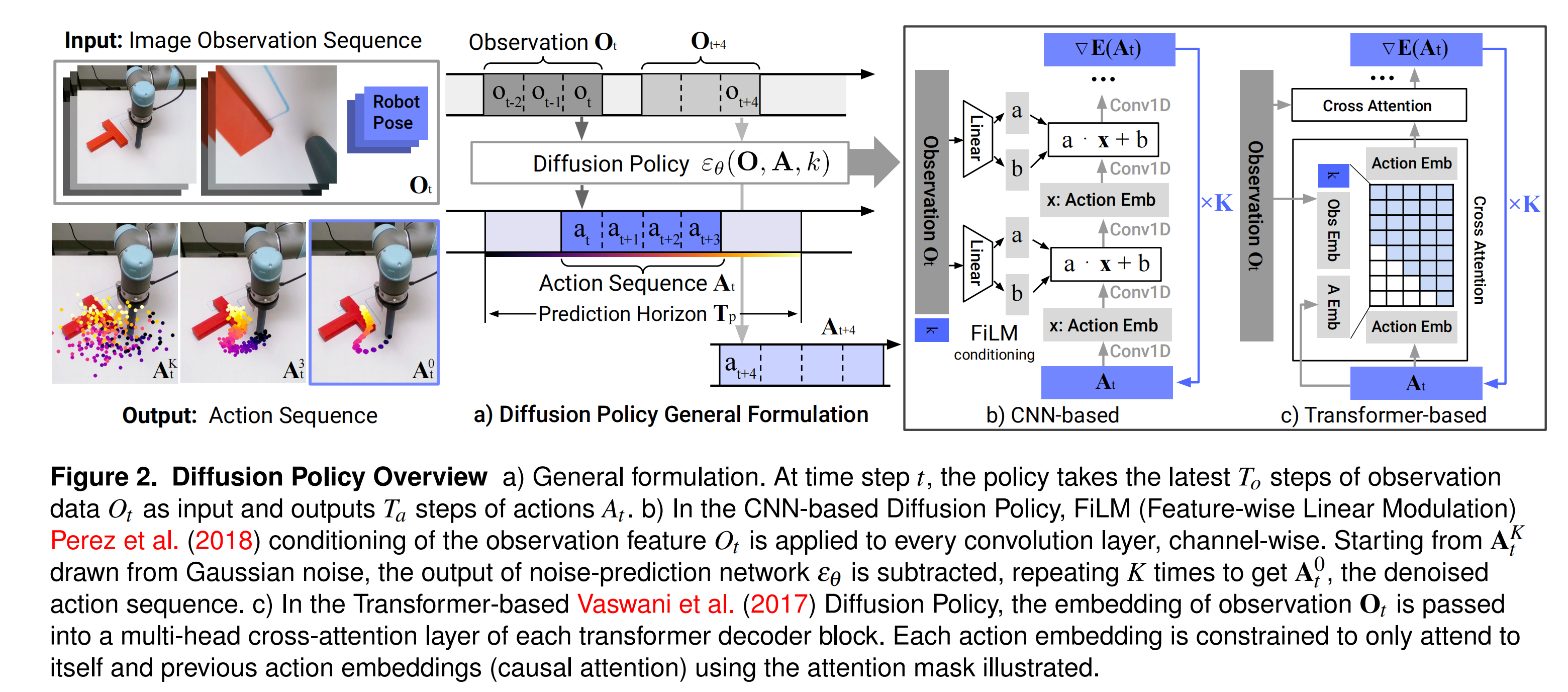
将DDPM应用于视觉运动策略学习,主要修改包括:输出改为机器人动作序列,并引入观察条件化。公式修改为
A
t
k
−
1
=
α
(
A
t
k
−
γ
ϵ
θ
(
O
t
,
A
t
k
,
k
)
+
N
(
0
,
σ
2
I
)
)
A_t^{k-1}=\alpha (A_t^k-\gamma \epsilon_{\theta}(O_t,A_t^k,k)+N(0,\sigma^2I))
Atk−1=α(Atk−γϵθ(Ot,Atk,k)+N(0,σ2I))
目标函数为
L
=
M
S
E
(
ϵ
k
,
ϵ
θ
(
O
t
,
A
t
0
+
ϵ
k
,
k
)
)
L = MSE(\epsilon^k,\epsilon_{\theta}(O_t,A_t^0+\epsilon^k,k))
L=MSE(ϵk,ϵθ(Ot,At0+ϵk,k))
3 实现细节
3.1 网络结构
在这里主要讨论了两种去噪网络的结构选用,分别是CNN和Transformer,主要核心在于如何引入观测条件化
3.1.1 CNN-based
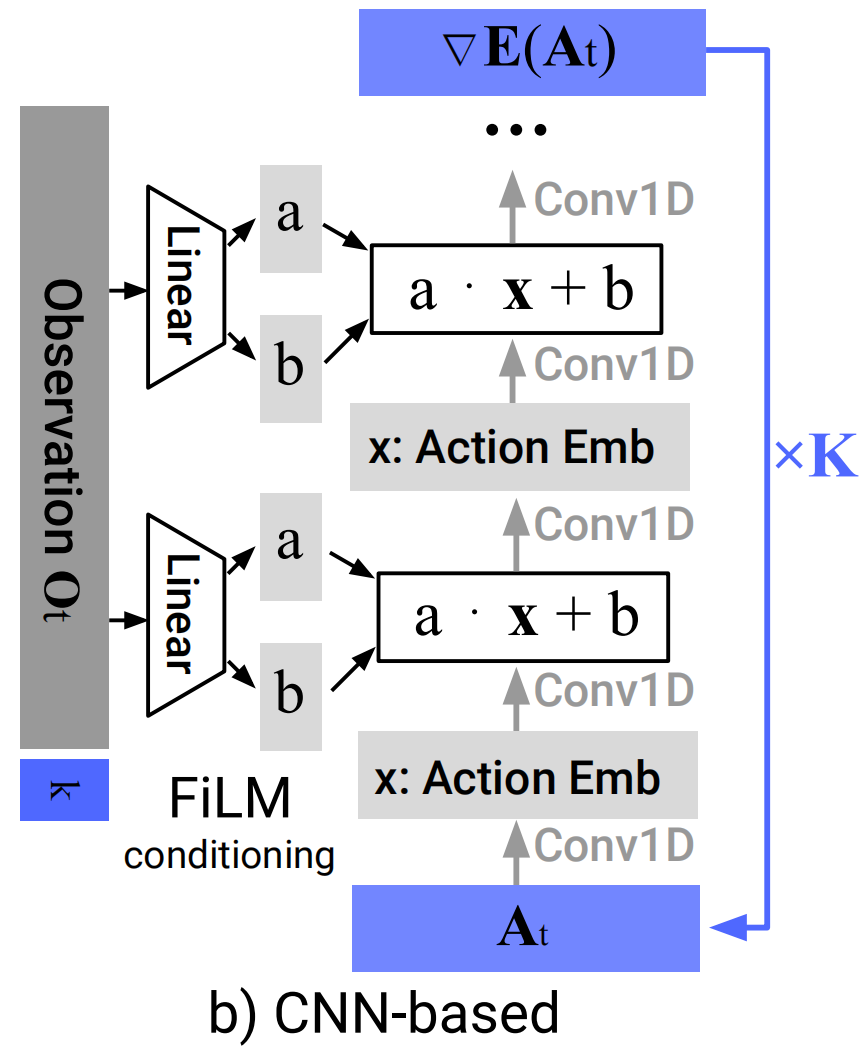
- backbone:使用一个1D时序卷积神经网络。该网络将整个动作序列 A t k A_t^k Atk(形状为预测视野×动作维度)视为一个时间序列进行处理。
- 条件化方式:采用 FiLM(Feature-wise Linear Modulation)。这是该实现的一个关键设计。FiLM机制在每一个卷积层之后、激活函数之前发生作用。
- 过程:视觉观察 O t O_t Ot(已经通过编码器处理,现在是个紧凑特征向量)通过一个投影网络(如MLP)生成一组FiLM参数( γ γ γ和 β β β)。然后,这些参数被应用到CNN的每一个卷积层上,对每个通道的特征图(当前卷积层输出)进行缩放和偏移 ( γ ⋅ F + β ) (γ⋅F+β) (γ⋅F+β)。
- 优势:实现了深度条件化,视觉信息从网络底层到顶层持续引导去噪过程,且计算高效(观察只需编码一次,用于所有去噪迭代)。
3.1.2 Transformer-based
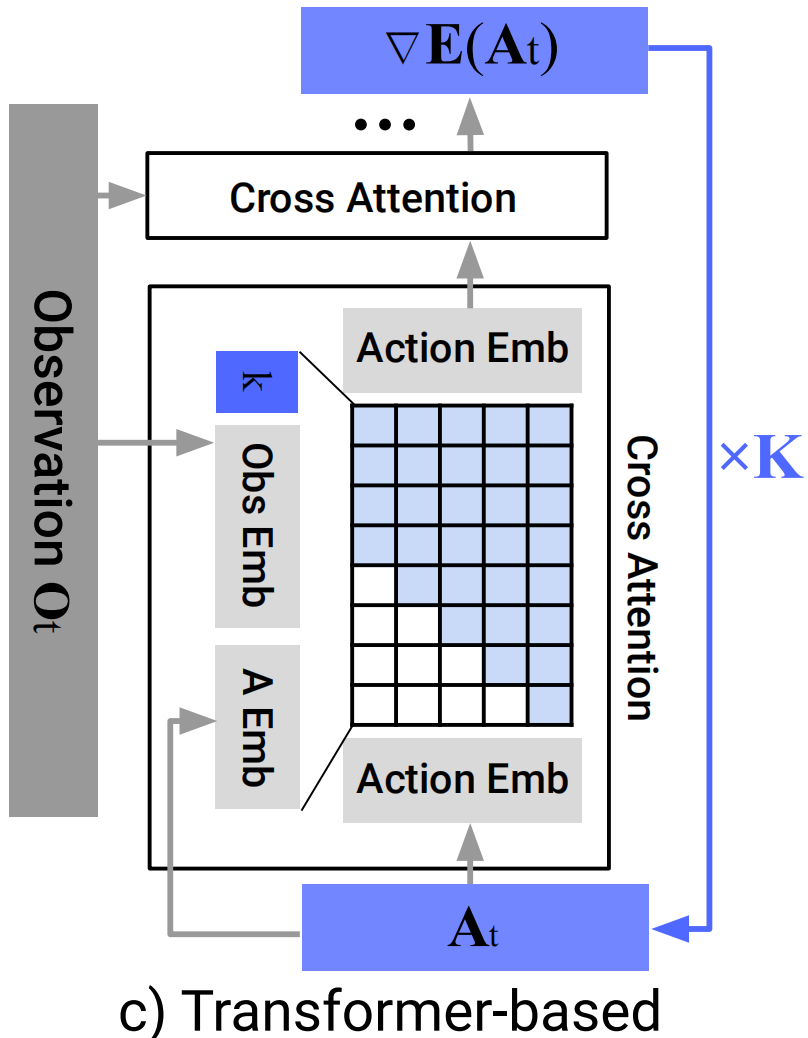
- backbone:采用Transformer解码器架构(类似minGPT)。噪声动作序列 A t k A_t^k Atk被切分成多个时间步的token,每个token被嵌入后输入Transformer块。
- 条件化方式:采用交叉注意力(Cross-Attention)。
- 过程:视觉观察 O t O_t Ot被编码为一个序列的嵌入。在Transformer的每一层中,动作token作为Query,观察嵌入作为Key和Value,进行多头交叉注意力计算。这使得每个动作token都可以动态地关注观察序列中最相关的部分。
- 因果注意力掩码:为确保自回归特性,对注意力矩阵应用因果掩码,使每个动作token只能关注自身及之前的时间步,防止信息泄露。
3.1.3 方式对比
| 特性 | 基于CNN的实现 | 基于Transformer的实现 |
|---|---|---|
| 核心机制 | 1D时序卷积 | Transformer解码器 + 因果注意力 |
| 条件化方式 | FiLM:深层、逐层特征调制 | 交叉注意力:动态、基于内容的查询 |
| 训练稳定性 | 高,开箱即用,超参数鲁棒 | 相对敏感,需要更多调优 |
| 处理高频动作 | 较弱,存在过度平滑效应 | 强,能捕捉快速变化 |
| 计算效率 | 通常更高,推理速度更快 | 参数更多,计算量可能更大 |
| 推荐场景 | 大多数任务的首选起点,尤其是动作变化平滑的任务 | 任务复杂、动作变化剧烈,且CNN性能不足时 |
3.2 视觉编码器
视觉编码器的主要作用是将图像编码为高维隐空间特征 O t O_t Ot,在这里使用未经过预训练的ResNet-18架构,通过端到端训练提取视觉特征。
3.3 噪声调度
采用Square Cosine Schedule,控制扩散过程的学习率调度,以平衡高低频动作信号。
平方余弦调度能更平滑地过渡不同噪声水平,通常比线性调度表现更好。
3.4 现实中的推理加速
使用DDIM(Denoising Diffusion Implicit Models)减少去噪迭代次数,实现实时控制。
4 扩散策略中的有趣特性
4.1 建立动作的多模态分布
在模仿学习的行为克隆中,对多模态分布的建模一直是个难题。但是扩散策略可以很好的解决。
扩散策略在动作生成中的多模态特性源自两个核心要素:
- 底层随机采样机制与随机初始化过程。具体而言,在随机朗之万动力学框架中,每次采样开始时都会从标准高斯分布中抽取初始样本 A t k A_t ^k Atk,这为最终动作预测 A t 0 A_t ^0 At0设定了不同的收敛区域。
- 通过大量迭代中的高斯扰动优化,即去噪过程中加入的高斯噪声,使得各个动作样本既能收敛又能自由穿梭于不同多模态的行动空间。
4.2 位置控制
文章中对比了几种方法在速度控制和位置控制中表现的异同。传统方法通常在位置控制中表现打折扣,但是扩散策略更适合于位置控制模式。Diffusion Policy恰好能够克服位置控制的传统缺陷(多模态性),并充分利用其固有优势(无漂移),而其他方法则不能。
4.3 动作序列预测
Diffusion Policy通过其强大的生成能力,能够有效预测未来多个时间步的动作序列。这种“序列到序列”的映射方式,相比传统的“观察到单步动作”的映射,带来了三大关键优势:
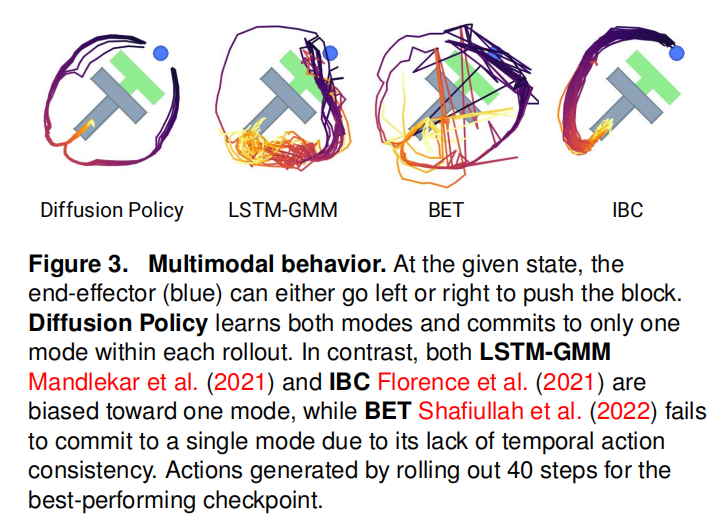
- 提升时序动作一致性
- 问题:在多模态场景中(例如,从左侧或右侧绕过障碍物),如果每一步都独立地从多模态分布中采样, consecutive actions could be drawn from different modes,导致动作抖动、轨迹在两种模式间跳变的不稳定行为。
- Diffusion Policy的解决方案:通过一次性预测整个动作序列,Diffusion Policy能够承诺于一个单一的模式。在Push-T任务中,策略在每次 rollout 中都会坚定地选择“从左绕”或“从右绕”的一条轨迹,并执行到底,从而生成平滑、一致、物理上可行的动作。
- 对空闲动作的鲁棒性
- 问题:在人类示教数据中,经常存在“空闲动作”(Idle Actions),即操作者暂停时产生的一段位置不变或速度为零的动作序列。单步策略极易过拟合这种暂停行为,导致策略在执行时经常“卡住”。
- Diffusion Policy的解决方案:通过预测序列,策略能够更好地理解上下文。它能够识别出空闲动作是演示中的一个特殊“段落”,并在生成动作序列时,主动地“跳过”或“填充”上合理的动作,从而避免陷入停滞。
- 减轻累积误差
- 问题:在速度控制下,单步预测的微小误差会随时间累积,导致最终位姿严重偏离。
- Diffusion Policy的解决方案:预测一个绝对位置序列(与位置控制协同)或一个长远的速度序列,能够在规划层面就考虑到整个时间窗口内的动作协调性,从而从根源上减少每一步的决策误差,避免误差累积。
4.4 训练稳定性
Diffusion Policy通过学习梯度函数而非能量函数,规避了估计难以处理的归一化常数这一难题,从而实现了显著优于隐式策略的训练稳定性。这使得它易于调参和部署。
4.5 控制理论的联系
对于一个简单的含有噪声的线性系统:
s
t
+
1
=
A
s
t
+
B
a
t
+
w
t
,
w
t
∼
N
(
0
,
Σ
w
)
s_{t+1}=As_t+Ba_t+w_t, w_t\sim N(0,\Sigma_w)
st+1=Ast+Bat+wt,wt∼N(0,Σw)
假设演示数据是来源于一个LQR控制策略
a
t
=
−
K
s
t
a_t=-Ks_t
at=−Kst。
- 收敛性断论:当预测步长为1时,迭代去噪过程,可以看作是在这个简单的凸优化问题(梯度场)上,从随机初始点(噪声)开始,进行一系列梯度下降步骤。由于问题本身是凸的(线性系统),梯度下降必然会收敛到全局最优点,也就是 a t = − K s t a_t=-Ks_t at=−Kst。
- 动力学模型学习:当预测步长大于1时,去噪过程需要产生 a t + t ′ = − K ( A − B K ) t ′ s t a_{t+t'}=-K(A-BK)^{t'}s_t at+t′=−K(A−BK)t′st,这展示出为了在未来时刻 t ′ t' t′做出正确的动作 a t + t ’ a_{t+t’} at+t’,策略需要知道到那个时刻的状态会变成什么样子,即隐式的学出了动力学模型。如果模型是非线性并且包含复杂噪声,这将更适合使用扩散策略。

















 483
483

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









